这里所说的获取点云的仪器指的是可以获取场景中物体距离信息的相关设备,下面分别从测距原理以及适用场景来进行介绍。
一、三角测距法
三角测距原理
就是利用三角形的几何关系来测量物体的距离。想象一下,你站在一个地方,你的朋友站在另一个地方,你们两个都看着同一个物体,但是你们与物体的距离不同。现在,我们可以通过测量你们两个的角度以及你们之间的距离差,来计算出你们与物体的距离。
具体做法是这样的:我们先测量你们两个的角度,也就是你们分别从自己的位置看物体时所测量到的夹角。然后,我们再测量你们之间的距离差,也就是你们两个位置之间的直线距离。利用这些信息,我们可以运用一些公式,算出你们与物体之间的距离。
基于三角测距原理的仪器
双目相机和结构光相机都是利用三角测距原理进行距离测量的。前者通过测量视差,而后者通过光斑形变来计算物体到相机的距离。
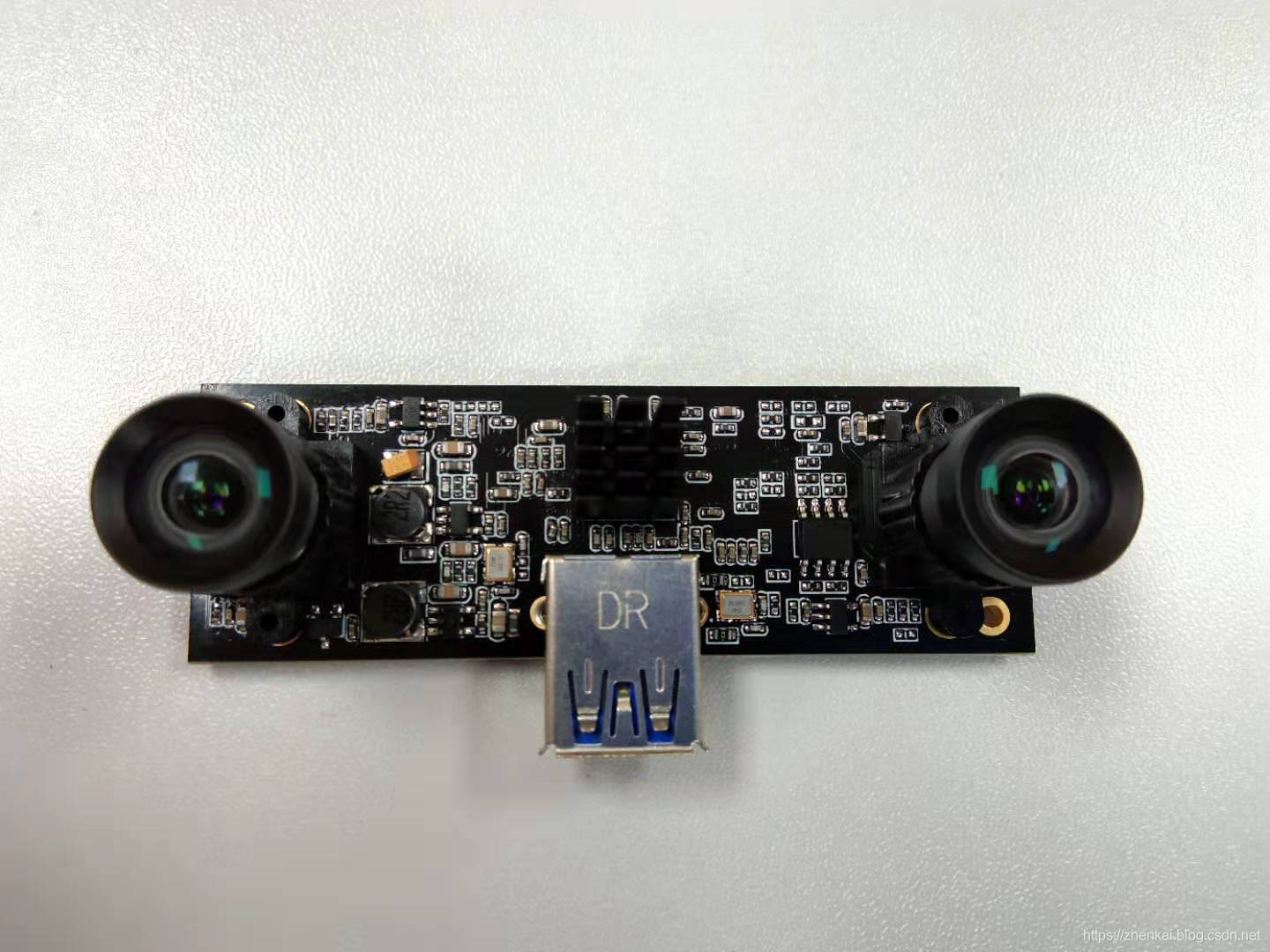
双目相机
通过两个摄像头(左右眼)同时拍摄同一场景,利用视差(左右视图中对应点之间的像素位移)来计算物体距离。根据视差和相机的内外参数,可以使用三角测量原理计算出物体到相机的距离。这种方法适用于近距离和中距离的测量,能够提供较高的深度精度和分辨率。

结构光相机
使用投影器投射出编码的光条或光斑(一般是红外光),并通过相机捕捉光斑在物体表面的畸变,然后根据畸变信息进行距离计算。通过计算光斑的形变,可以获得物体表面的深度图像。这种方法也属于三角测距原理,通过解析光斑的形变来计算物体到相机的距离。结构光相机适用于中距离和远距离的测量,能够提供较高的测量精度和体积重建能力。

需要注意的是:
双目相机由于依靠左右相机视图的视差计算获得距离信息,会十分消耗资源,计算可能比较耗时。且对缺乏纹理或不具有明显颜色对比的场景时(比如墙壁),光照不均匀时,可能效果不是很好。
结构光相机由于会主动投影编码的光条或光斑,因此即使缺乏纹理的场景也有较好的测距效果,但是结构光相机可能不适用于对快速移动的物体进行测距
二、飞行时间法
飞行时间法测距原理
在飞行时间测距中,首先发送一个信号(可以是声波、激光脉冲、电磁波等)从测距器发射到目标物体上。这个信号会在目标物体上发生反射、散射或吸收。被反射或散射回来的信号再次被接收器接收。接收器接收到信号后,会记录下信号从发射到接收的时间差,即飞行时间。根据信号传播速度已知的特性,将测得的飞行时间与信号传播速度相乘,就可以得到目标物体与测距器之间的距离。
基于激光测距的仪器
激光雷达(Lidar)
利用激光束发射出去并接收返回的激光信号来获得目标物体的距离信息。激光雷达具有高精度、高速度和长测距等特点,因此在无人驾驶、机器人导航、环境感知等领域得到了广泛应用。
激光雷达主要由激光发射器、接收器、扫描机构和数据处理模块等组成。发射器会发射一个短脉冲的激光束,然后激光束会在目标物体上反射、散射或吸收部分能量,形成返回的激光信号。接收器会接收这些返回的激光信号,并记录下发射和接收之间的时间差(也就是飞行时间)。
为了获取更多的目标物体信息,激光雷达会利用扫描机构进行扫描,可以是旋转式的机构,也可以是多个激光束之间的切换。通过将激光束扫描到不同的方向上,激光雷达可以获取周围环境中的多个点的距离信息。扫描完成后,激光雷达会将所有的测距数据传输到数据处理模块进行处理和分析。
激光雷达的测距精度可以达到亚厘米级别,适用于远距离测量。它能够快速地获取周围环境中的三维点云数据,用于构建地图、障碍物检测、目标识别和姿态估计等应用。激光雷达还具有较高的抗干扰能力,能够在各种光照条件和恶劣环境中稳定工作。

毫米波雷达
毫米波雷达(Millimeter Wave Radar)是一种利用毫米波信号进行测距和目标检测的雷达系统。毫米波是高频电磁波,在波长为1至10毫米之间,频率为30至300 GHz之间。毫米波雷达主要由天线系统、发射器、接收器和信号处理模块等组成。发射器会发射一系列连续或脉冲的毫米波信号,然后这些信号会被目标物体所反射或散射,并被接收器接收回来。
毫米波雷达在目标检测和跟踪上有着广泛的应用,它能够提供实时的距离、速度和方位角等信息。相比于光学传感器,毫米波辐射对于雨、雪、雾等大气颗粒的影响较小,使得毫米波雷达在恶劣天气下比激光雷达的可靠性更高。但是就分辨率而言,还是激光雷达分辨率高。
超声波雷达
利用超声波的传播速度和回波时间来确定目标物体与雷达之间的距离
超声波雷达的工作原理是,通过发射器产生超声波脉冲,并将其传播到目标物体。当超声波脉冲遇到目标物体后,一部分能量被物体吸收,一部分被反射回来形成回波。接收器接收到这些回波信号,并测量发射和回波之间的时间差。由于声波在空气中的传播速度已知,通过将传播时间与传播速度相乘,可以计算目标物体与雷达之间的距离。
声波比毫米波的传输速度更慢,精度较差,不适合对快速移动的物体进行测距,在汽车上主要是作为倒车测距使用的。
三、其他
一些帮助理解的视频(来自于B站):
激光雷达测距原理讲解:21.激光雷达工作原理_哔哩哔哩_bilibili
各类激光雷达工作过程:各类激光雷达原理_哔哩哔哩_bilibili
激光雷达获取点云数据的过程:激光雷达点云采集原理以及在自动驾驶中的应用(中文字幕)_哔哩哔哩_bilibili
激光雷达、毫米波雷达在自动驾驶方面的发展:详解激光雷达(完整版)_哔哩哔哩_bilibili