6.1 就绪列表
6.1.1 线程就绪优先级组
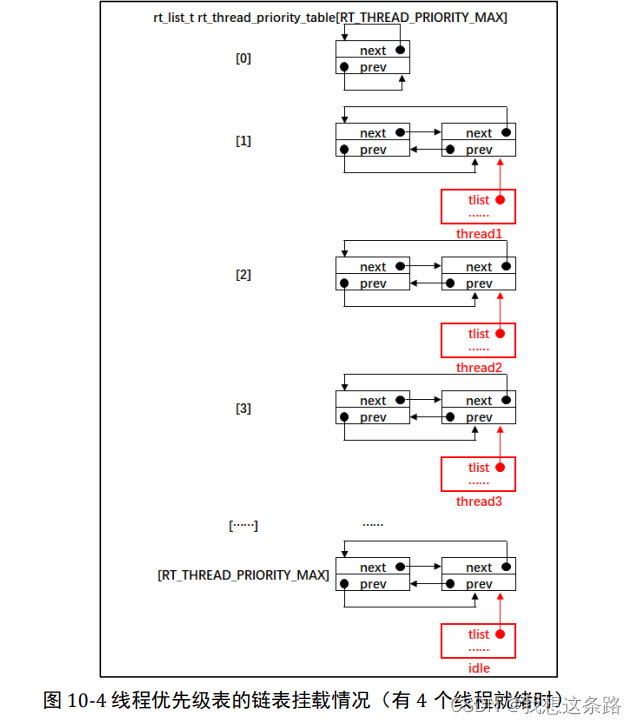
线程优先级表的索引对应的线程的优先级。

为了快速的找到线程在线程优先级表的插入和移出的位置,RT-Thread专门设计了一个线程就绪优先级组。线程就绪优先组是一个32位的整型数,每一个位对应一个优先级,最多表示32个优先级
rt_uint32_t rt_thread_ready_priority_group;

6.1.2 寻找优先级最高的线程
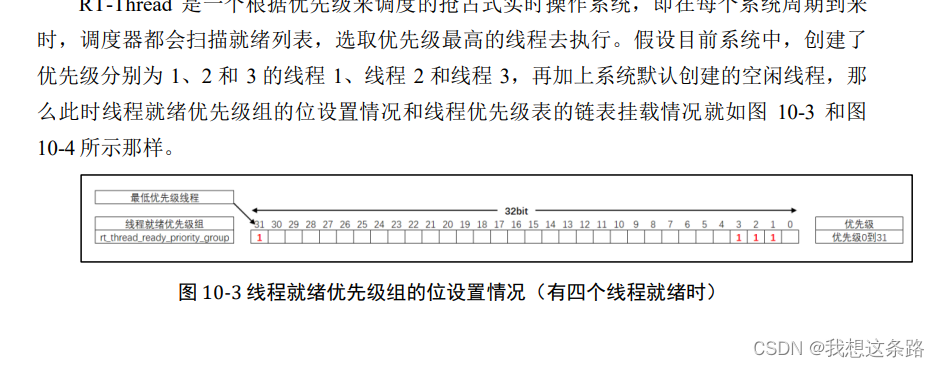
从图中看出,第一个置1的位是位1,即表示此时就绪的线程当中,优先级最高的线程1,然后调度器从线程优先级表的索引1下去除线程1的线程控制块,从而切换到线程1.
kservice.c中
const rt_uint8_t __lowest_bit_bitmap[] =
{/* 00 */ 0, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 10 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 20 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 30 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 40 */ 6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 50 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 60 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 70 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 80 */ 7, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 90 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* A0 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* B0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* C0 */ 6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* D0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* E0 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* F0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0
};/*** This function finds the first bit set (beginning with the least significant bit)* in value and return the index of that bit.** Bits are numbered starting at 1 (the least significant bit). A return value of* zero from any of these functions means that the argument was zero.** @return return the index of the first bit set. If value is 0, then this function* shall return 0.*/
int __rt_ffs(int value)
{if (value == 0) return 0;if (value & 0xff)return __lowest_bit_bitmap[value & 0xff] + 1;if (value & 0xff00)return __lowest_bit_bitmap[(value & 0xff00) >> 8] + 9;if (value & 0xff0000)return __lowest_bit_bitmap[(value & 0xff0000) >> 16] + 17;return __lowest_bit_bitmap[(value & 0xff000000) >> 24] + 25;
}
6.1.3 线程优先级表
scheduler.c
rt_list_t rt_thread_priority_table[RT_THREAD_PRIORITY_MAX];
将线程插入到线程优先级表和移出分别由scheduler.c的rt_schedule_insert_thread()和rt_schedule_remove_thread()这两个函数实现。
void rt_schedule_insert_thread(struct rt_thread *thread)
{register rt_base_t temp;/* disable interrupt */temp = rt_hw_interrupt_disable();/* change stat */thread->stat = RT_THREAD_READY | (thread->stat & ~RT_THREAD_STAT_MASK);/* insert thread to ready list */rt_list_insert_before(&(rt_thread_priority_table[thread->current_priority]),&(thread->tlist));/* set priority mask */#if RT_THREAD_PRIORITY_MAX > 32rt_thread_ready_table[thread->number] |= thread->high_mask;
#endifrt_thread_ready_priority_group |= thread->number_mask;P_DBG("insert thread %x grout %x\n",thread,rt_thread_ready_priority_group);/* enable interrupt */rt_hw_interrupt_enable(temp);
}/** This function will remove a thread from system ready queue.** @param thread the thread to be removed** @note Please do not invoke this function in user application.*/
void rt_schedule_remove_thread(struct rt_thread *thread)
{register rt_base_t temp;/* disable interrupt */temp = rt_hw_interrupt_disable();/* remove thread from ready list */rt_list_remove(&(thread->tlist));if (rt_list_isempty(&(rt_thread_priority_table[thread->current_priority]))){rt_thread_ready_priority_group &= ~thread->number_mask;}/* enable interrupt */rt_hw_interrupt_enable(temp);
}6.2 修改代码
6.2.1 修改线程控制块
struct rt_thread
{char name[RT_NAME_MAX];rt_uint8_t type;rt_uint8_t flag;rt_list_t list;void *sp; /* 线程栈指针 */void *entry; /* 线程入口地址 */void *parameter; /* 线程形参 */ void *stack_addr; /* 线程起始地址 */rt_uint32_t stack_size; /* 线程栈大小,单位为字节 */rt_list_t tlist; /* 线程链表节点 */
#if TEST_USE_TICK_ENABLErt_ubase_t init_tick;rt_ubase_t remaining_tick;
#endif**rt_uint8_t current_priority;rt_uint8_t init_priority;rt_uint32_t number_mask;rt_err_t error;rt_uint8_t stat;**};
rtdef.h中定义错误码
#define RT_EOK 0 /**< There is no error */
#define RT_ERROR 1 /**< A generic error happens */
#define RT_ETIMEOUT 2 /**< Timed out */
#define RT_EFULL 3 /**< The resource is full */
#define RT_EEMPTY 4 /**< The resource is empty */
#define RT_ENOMEM 5 /**< No memory */
#define RT_ENOSYS 6 /**< No system */
#define RT_EBUSY 7 /**< Busy */
#define RT_EIO 8 /**< IO error */
#define RT_EINTR 9 /**< Interrupted system call */
#define RT_EINVAL 10 /**< Invalid argument */定义线程状态
#define RT_THREAD_INIT 0x00 /**< Initialized status */
#define RT_THREAD_READY 0x01 /**< Ready status */
#define RT_THREAD_SUSPEND 0x02 /**< Suspend status */
#define RT_THREAD_RUNNING 0x03 /**< Running status */
#define RT_THREAD_BLOCK RT_THREAD_SUSPEND /**< Blocked status */
#define RT_THREAD_CLOSE 0x04 /**< Closed status */
#define RT_THREAD_STAT_MASK 0x0f
修改rt_system_scheduler_init()
void rt_system_scheduler_init(void)
{register rt_base_t offset;for(offset = 0; offset < RT_THREAD_PRIORITY_MAX;offset++){rt_list_init(&rt_thread_priority_table[offset]);}rt_current_priority = RT_THREAD_PRIORITY_MAX - 1;rt_current_thread = RT_NULL;rt_thread_ready_priority_group = 0;/* 初始化线程休眠列表,当线程创建好没有启动之前会被放入到这个列表 */}
6.2.3 修改线程初始化函数rt_thread_init()
rt_err_t rt_thread_init(struct rt_thread *thread,const char *name,void (*entry)(void *parameter),void *parameter,void *stack_start,rt_uint32_t stack_size,**rt_uint8_t priority**)
{rt_object_init((rt_object_t)thread,RT_Object_Class_Thread,name);rt_list_init(&(thread->tlist));thread->entry = (void *)entry;thread->parameter = parameter;thread->stack_addr = stack_start;thread->stack_size = stack_size;/* 初始化线程栈,并返回线程栈指针 */thread->sp = (void *)rt_hw_stack_init( thread->entry,thread->parameter,(void *)((char *)thread->stack_addr + thread->stack_size - 4) );**thread->init_priority = priority;thread->current_priority = priority;thread->number_mask = 0;thread->error = RT_EOK;thread->stat = RT_THREAD_INIT;**}
6.2.4 添加线程启动函数rt_thread_startup()
rt_err_t rt_thread_startup(rt_thread_t thread)
{thread->current_priority = thread->init_priority;thread->number_mask = 1L << thread->current_priority;thread->stat = RT_THREAD_SUSPEND;rt_thread_resume(thread);if(rt_thread_self() != RT_NULL){rt_schedule();}
}
rt_err_t rt_thread_resume(rt_thread_t thread)
{register rt_base_t temp;if((thread->stat & RT_THREAD_STAT_MASK) != RT_THREAD_SUSPEND){return -RT_ERROR;}temp = rt_hw_interrupt_disable();rt_list_remove(&(thread->tlist));rt_hw_interrupt_enable(temp);rt_schedule_insert_thread(thread);
}
6.2.5 修改空闲线程初始化函数rt_thread_idle_init()
void rt_thread_idle_init(void)
{rt_thread_init(&idle,"idle",rt_thread_idle_entry,RT_NULL,&rt_thread_stack[0],sizeof(rt_thread_stack),RT_THREAD_PRIORITY_MAX - 1);**rt_thread_startup(&idle);**}6.2.6 修改启动系统调度器函数rt_system_scheduler_start()
不再是手动指定第一个需要运行的线程,而是根据优先级来决定第一个运行的线程。
void rt_system_scheduler_start(void)
{register struct rt_thread *to_thread;register rt_ubase_t highest_ready_priority;highest_ready_priority = __rt_ffs(rt_thread_ready_priority_group)-1;P_DBG("first start pri %d\n",highest_ready_priority);to_thread = rt_list_entry(rt_thread_priority_table[highest_ready_priority].next,struct rt_thread,tlist);rt_current_thread = to_thread;rt_hw_context_switch_to((rt_uint32_t)&to_thread->sp);}
6.2.7 修改系统调度函数rt_schedule()
根据优先级来实现
void rt_schedule(void)
{register rt_base_t temp;rt_base_t level;register rt_ubase_t highest_ready_priority;struct rt_thread *to_thread;struct rt_thread *from_thread;temp = rt_hw_interrupt_disable();highest_ready_priority = __rt_ffs(rt_thread_ready_priority_group)-1;P_DBG("read pri %d\n",highest_ready_priority);to_thread = rt_list_entry(rt_thread_priority_table[highest_ready_priority].next,struct rt_thread,tlist);P_DBG("read tgread %x\n",to_thread);if(to_thread != rt_current_thread){P_DBG("!= current thread %x\n",rt_current_thread);rt_current_priority = (rt_uint8_t) highest_ready_priority;from_thread = rt_current_thread;rt_current_thread = to_thread;rt_hw_context_switch((rt_uint32_t)&from_thread->sp,(rt_uint32_t)&to_thread->sp);rt_hw_interrupt_enable(temp);}else{rt_hw_interrupt_enable(temp);}/* 产生上下文切换 */}6.2.8 修改线程阻塞函数
void rt_thread_delay(rt_tick_t tick)
{register rt_base_t temp;struct rt_thread *thread;temp = rt_hw_interrupt_disable(); thread = rt_current_thread;thread->remaining_tick = tick;thread->stat = RT_THREAD_SUSPEND; rt_thread_ready_priority_group &= ~thread->number_mask;rt_hw_interrupt_enable(temp);rt_schedule();
}6.2.9 修改时基更i新函数rt_tick_increase()
void rt_tick_increase(void)
{rt_ubase_t i;struct rt_thread *thread;rt_tick++;for(i = 0;i < RT_THREAD_PRIORITY_MAX;i++){thread = rt_list_entry(rt_thread_priority_table[i].next,struct rt_thread,tlist);if(thread->remaining_tick > 0){thread->remaining_tick--;if(thread->remaining_tick == 0){rt_thread_ready_priority_group |= thread->number_mask;}}rt_schedule();}
}6.3 main.c
/* 初始化线程 */rt_thread_init( &rt_flag1_thread, "flag1", /* 线程控制块 */flag1_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag1_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag1_thread_stack),3 ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 *///rt_list_insert_before( &(rt_thread_priority_table[0]),&(rt_flag1_thread.tlist) );P_DBG("thread flag1 %x timer %s\n",&rt_flag1_thread,rt_flag1_thread.thread_timer.parent.name);rt_thread_startup(&rt_flag1_thread);/* 初始化线程 */rt_thread_init( &rt_flag2_thread, "falg2", /* 线程控制块 */flag2_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag2_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag2_thread_stack),4 ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */P_DBG("thread flag1 %x timer %s\n",&rt_flag2_thread,rt_flag2_thread.thread_timer.parent.name);//rt_list_insert_before( &(rt_thread_priority_table[1]),&(rt_flag2_thread.tlist) );rt_thread_startup(&rt_flag2_thread);/* 启动系统调度器 */rt_system_scheduler_start();/* 线程1 */
void flag1_thread_entry( void *p_arg )
{for( ;; ){P_DBG("flag1 thread\n");flag2 = 1;P_DBG("flag1 thread will dela1\n");rt_thread_delay(10);flag2 = 0;P_DBG("flag1 thread will dela2\n");rt_thread_delay(10);}
}/* 线程2 */
void flag2_thread_entry( void *p_arg )
{for( ;; ){P_DBG("flag2 thread\n");flag2 = 1;rt_thread_delay(2);flag2 = 0;P_DBG("flag2 thread will dela1\n");rt_thread_delay(2);}
}





![[护网杯 2018]easy_tornado 1(两种解法!)](https://img-blog.csdnimg.cn/img_convert/2e0b30b7b436913a9bde89c462cd1daa.png)
![[pipe-自写管道] 强网拟态2023-water-ker](https://img-blog.csdnimg.cn/e195d80b41ed4a9ba82e68bb356492e8.png)