通讯协议之路主要分为两部分,第一部分从理论上面讲解各类协议的通讯原理以及通讯格式,第二部分从具体运用上讲解各类通讯协议的具体应用方法。
后续文章会同时发表在个人博客(jason1016.club)、CSDN;视频会发布在bilibili(UID:399951374)
本文前缀:
通讯协议专栏:通讯协议_JASON丶LI的博客-CSDN博客
UART理论部分:
一、具体实践方案选择
同样的对于SPI也具有软件模拟和硬件外设配置的两种方案,此外也同样可以采用DMA转运数据、中断处理数据、轮询处理数据这三种方案。
软件SPI和硬件SPI之间的关系是,软件SPI是对硬件SPI的一种软件实现。软件SPI可以在没有硬件SPI模块的情况下实现SPI通信,但由于软件实现的限制,软件SPI的速度和可靠性可能不如硬件SPI。在一些资源受限的系统中,软件SPI是一种常用的替代方案。
软件模拟
按照SPI传输的时序与模式,通过对SCK、SS、MOSI、MISO这四个进行高低电平的时序配置是实现SPI通讯协议的模拟。
硬件模式
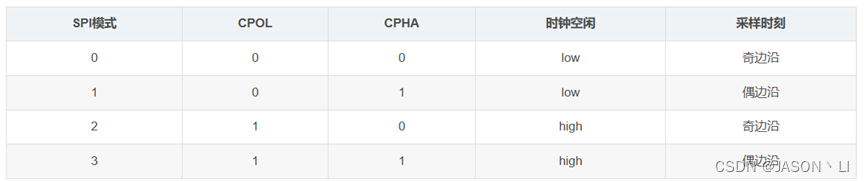
硬件模式直接配置单片机的SPI外设,使用其封装的库进行协议通信,不需要像软件一样一步步配置其时序,硬件SPI的工作状态主要通过读其SPI内部寄存器进行判断。其信息读取的4种模式按照参考下表。
NSS管脚与片选
NSS管脚及我们熟知的片选信号,作为主设备NSS管脚为高电平,从设备NSS管脚为低电平。当NSS管脚为低电平时,该spi设备被选中,可以和主设备进行通信。在stm32中,每个spi控制器的NSS信号引脚都具有两种功能,即输入和输出。所谓的输入就是NSS管脚的信号给自己。所谓的输出就是将NSS的信号送出去,给从机。
NSS分为内部管脚和外部管脚,通过设置spi_cr1寄存器的ssm位和ssi位都为1可以设置NSS管脚为软件输入模式且内部管脚提供的电平为高电平,其中SSM位为使能软件输入位。SSI位为设置内部管脚电平位。同理通过设置SSM和SSI位1和0则此时的NSS管脚为软件输入模式但内部管脚提供的电平为0。若从设备是一个其他的带有spi接口的芯片,并不能选择NSS管脚的方式,则可以有两种办法,一种是将NSS管脚直接接低电平。另一种就是通过主设备的任何一个gpio口去输出低电平选中从设备。
二、开发实践
标准库
软件SPI
SPI_Software.c
#include "stm32f10x.h" // Device header
#include "SPI_Software.h"void MySPI_W_SS(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue);
}void MySPI_W_SCK(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_5, (BitAction)BitValue);
}void MySPI_W_MOSI(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_7, (BitAction)BitValue);
}uint8_t MySPI_R_MISO(void)
{return GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6);
}void MySPI_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);MySPI_W_SS(1);MySPI_W_SCK(0);
}void MySPI_Start(void)
{MySPI_W_SS(0);
}void MySPI_Stop(void)
{MySPI_W_SS(1);
}uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t i, ByteReceive = 0x00;for (i = 0; i < 8; i ++){MySPI_W_MOSI(ByteSend & (0x80 >> i));MySPI_W_SCK(1);if (MySPI_R_MISO() == 1){ByteReceive |= (0x80 >> i);}MySPI_W_SCK(0);}return ByteReceive;
}//SPI写应该Byte函数
void SPI_WriteByte(uint8_t Byte)
{uint8_t i;for(i = 0;i < 8;i++){//SCK从低电平到高电平(上升沿)时传输数据MySPI_W_SCK(0);if(Byte & 0x80) //取出最高为,每次只能传输一个bit的数据{MySPI_W_MOSI(1);}else{MySPI_W_MOSI(0);}Byte <<= 1;MySPI_W_SCK(1);}MySPI_W_SCK(0);
}//SPI读一个Byte函数
uint8_t SPI_ReadByte(void)
{uint8_t i,Byte;MySPI_W_SCK(0);for(i = 0;i < 8;i++){MySPI_W_SCK(1);Byte <<= 1;if(MySPI_R_MISO()){Byte ++;}MySPI_W_SCK(0);}return Byte;
}SPI_Software.h
#ifndef __SPISOFTWARE_H
#define __SPISOFTWARE_H#include "stm32f10x.h" // Device headervoid MySPI_W_SS(uint8_t BitValue);void MySPI_W_SCK(uint8_t BitValue);void MySPI_W_MOSI(uint8_t BitValue);uint8_t MySPI_R_MISO(void);void MySPI_Init(void);void SPI_WriteByte(uint8_t Byte);uint8_t SPI_ReadByte(void);#endif
SPI_Control.c
#include "SPI_Control.h"
#include "SPI_Software.h"//设备为:25AA010A//EEPROM开启写使能函数
void EEPROM_Write_ENABLE(void)
{//MySPI_W_SS(1);MySPI_W_SS(0);SPI_WriteByte(EEPROM_Address_ENABLE);MySPI_W_SS(1);
}//EEPROM关闭写使能函数
void EEPROM_Write_DISABLE(void)
{//MySPI_W_SS(1);MySPI_W_SS(0);SPI_WriteByte(EEPROM_Address_DISABLE);MySPI_W_SS(1);
}//从EEPROM中读取数据
uint8_t EEPROM_Read(uint8_t HW_Address,uint8_t SW_Address)
{uint8_t date = 0;//MySPI_W_SS(1);MySPI_W_SS(0);SPI_WriteByte(HW_Address);SPI_WriteByte(SW_Address);date = SPI_ReadByte();MySPI_W_SS(1);return date;
}//往EEPROM中写数据函数
void EEPROM_Write(uint8_t HW_Address,uint8_t SW_Address,uint8_t date)
{//HW_Address:EEPROM硬件地址//SW_Address: EEPROM的软件地址,即写出内存的地址uint8_t status = 0x01; EEPROM_Write_ENABLE(); //开启写使能//MySPI_W_SS(1);MySPI_W_SS(0);SPI_WriteByte(HW_Address);SPI_WriteByte(SW_Address);SPI_WriteByte(date);MySPI_W_SS(1);//读取EEPROM状态寄存器的最低为,当状态寄存器的最低位为1表示还未写完while(1){//MySPI_W_SS(1);MySPI_W_SS(0);SPI_WriteByte(EEPROM_Address_REGISTER);status = SPI_ReadByte();if((status & 0x01) == 0){break;}MySPI_W_SS(1);}EEPROM_Write_DISABLE(); //关闭写使能
}
SPI_Control.h
#ifndef __SPICONTROL_H
#define __SPICONTROL_H#include "stm32f10x.h" // Device header#define EEPROM_Address_W 0x02 //从指定地址开始写
#define EEPROM_Address_R 0X03 //从指定地址开始读
#define EEPROM_Address_ENABLE 0x06 //开启写使能命令
#define EEPROM_Address_DISABLE 0x04 //关闭写使能命令
#define EEPROM_Address_REGISTER 0x05 //读取寄存器的状态(状态寄存器的值)void EEPROM_Write_ENABLE(void);void EEPROM_Write_DISABLE(void);uint8_t EEPROM_Read(uint8_t HW_Address,uint8_t SW_Address);void EEPROM_Write(uint8_t HW_Address,uint8_t SW_Address,uint8_t date);#endif
main.c
#include "stm32f10x.h" // Device header
#include <string.h>
#include "delay.h"
#include "sys.h"
#include "led.h"
#include "OLED.h"
#include "key.h"
#include "SPI_Control.h"
#include "SPI_Software.h"uint8_t RxData;
extern uint8_t num;int main(void)
{led_Init();Key_Init();OLED_Init();MySPI_Init();
// num = EEPROM_Read(EEPROM_Address_R,0x00);while(1){OLED_ShowNum(1,1,num,2);EEPROM_Write(EEPROM_Address_W,0x00,num);led_turn(GPIOB, GPIO_Pin_0);Delay_ms(1000);}
}
硬件SPI
HAL库
- 有主机模式全双工/半双工——Full-Duplex Master
- 从机模式全双工/半双工——Ful-Duplex Slave
- 只接收主机模式/只接收从机模式——Half-Duplex Master
- 只发送主机模式——Half-Duplex Slave
/* IO operation functions ****************************************************/
/******* Blocking mode: Polling */
HAL_StatusTypeDef HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_I2C_Master_Receive(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_I2C_Slave_Transmit(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_I2C_Slave_Receive(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_I2C_IsDeviceReady(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint32_t Trials, uint32_t Timeout);/******* Non-Blocking mode: Interrupt */
HAL_StatusTypeDef HAL_I2C_Master_Transmit_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Master_Receive_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Slave_Transmit_IT(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Slave_Receive_IT(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Mem_Write_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Mem_Read_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size);HAL_StatusTypeDef HAL_I2C_Master_Seq_Transmit_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t XferOptions);
HAL_StatusTypeDef HAL_I2C_Master_Seq_Receive_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t XferOptions);
HAL_StatusTypeDef HAL_I2C_Slave_Seq_Transmit_IT(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size, uint32_t XferOptions);
HAL_StatusTypeDef HAL_I2C_Slave_Seq_Receive_IT(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size, uint32_t XferOptions);
HAL_StatusTypeDef HAL_I2C_EnableListen_IT(I2C_HandleTypeDef *hi2c);
HAL_StatusTypeDef HAL_I2C_DisableListen_IT(I2C_HandleTypeDef *hi2c);
HAL_StatusTypeDef HAL_I2C_Master_Abort_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress);/******* Non-Blocking mode: DMA */
HAL_StatusTypeDef HAL_I2C_Master_Transmit_DMA(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Master_Receive_DMA(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Slave_Transmit_DMA(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Slave_Receive_DMA(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Mem_Write_DMA(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_I2C_Mem_Read_DMA(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size);HAL_StatusTypeDef HAL_I2C_Master_Seq_Transmit_DMA(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t XferOptions);
HAL_StatusTypeDef HAL_I2C_Master_Seq_Receive_DMA(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t XferOptions);
HAL_StatusTypeDef HAL_I2C_Slave_Seq_Transmit_DMA(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size, uint32_t XferOptions);
HAL_StatusTypeDef HAL_I2C_Slave_Seq_Receive_DMA(I2C_HandleTypeDef *hi2c, uint8_t *pData, uint16_t Size, uint32_t XferOptions);硬件模式:
SPI的proteus硬件模式仍在调试,后续会持续更新


![[算法训练营] 贪心算法专题(二)](https://img-blog.csdnimg.cn/a4450e2e6d304b86aa8ad7b3700aa50f.png)