目录
一、环境
二、akaze特征点算法
2.1、基本原理
2.2、实现过程
2.3、实际应用
2.4、优点与不足
三、代码
3.1、数据准备
3.2、完整代码
一、环境
本文使用环境为:
- Windows10
- Python 3.9.17
- opencv-python 4.8.0.74
二、akaze特征点算法
特征点检测算法AKAZE是一种广泛应用于图像处理领域的算法,它可以在不同尺度下提取图像的特征点,并具有尺度不变性和旋转不变性等优点。本文将概括介绍AKAZE算法的基本原理、实现过程以及其在实际应用中的表现。
2.1、基本原理
AKAZE算法是基于尺度空间理论和图像金字塔的,它通过非线性扩散滤波来构建尺度空间,并在尺度空间中检测关键点。在AKAZE中,关键点的检测是通过一个称为“加速非线性扩散”的过程来实现的,该过程可以快速地生成尺度空间。此外,AKAZE还采用了M-LDB描述子来描述特征点的周围区域。
2.2、实现过程
- 图像预处理:首先,对输入图像进行预处理,包括灰度化和降噪等操作,以提高算法的准确性。
- 构建尺度空间:然后,通过非线性扩散滤波来构建尺度空间,并在尺度空间中检测关键点。在这个过程中,采用了一种称为“加速非线性扩散”的方法,该方法可以快速地生成尺度空间。
- 关键点检测:在尺度空间中,采用基于区域的方法来检测关键点。这些关键点对应于图像中的局部极值点,即在周围区域内具有最大或最小的灰度值。
- 描述子生成:在检测到关键点后,AKAZE采用M-LDB描述子来描述特征点的周围区域。M-LDB描述子是一种改进的LDB描述子,它可以更好地描述图像的特征。
- 特征匹配:最后,通过比较不同图像之间的M-LDB描述子来进行特征匹配,从而识别出图像中的相似区域。
2.3、实际应用
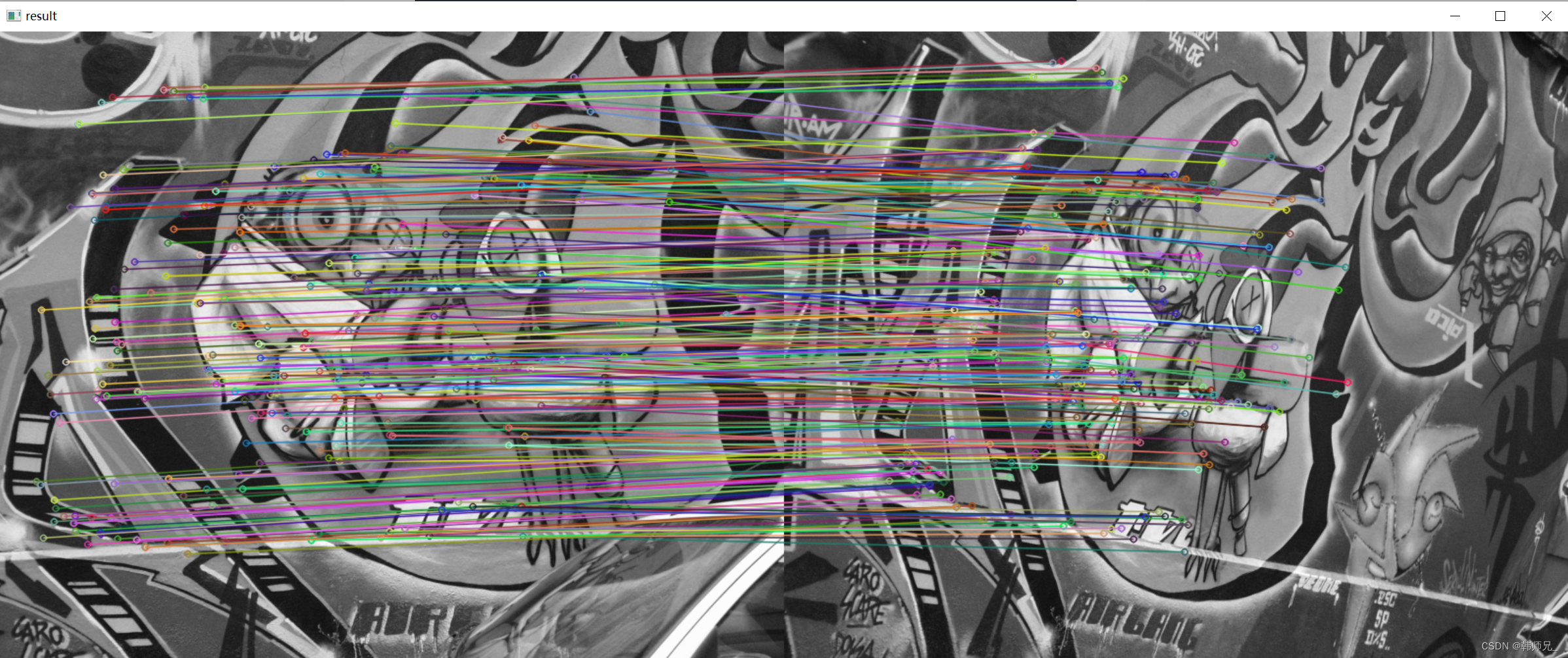
AKAZE算法在实际应用中表现出了良好的性能,可以应用于许多领域,如目标识别、图像配准、拼接等。例如,在目标识别中,AKAZE可以用于检测图像中的目标特征点,并通过特征匹配来识别出目标物体。此外,AKAZE还可以用于图像拼接中,通过对齐不同图像中的特征点来实现无缝拼接。
2.4、优点与不足
AKAZE算法具有以下优点:
- 尺度不变性:AKAZE算法能够在不同尺度下提取图像的特征点,从而适应了不同尺度的图像。
- 旋转不变性:AKAZE算法具有旋转不变性,可以在不同角度下提取图像的特征点。
- 加速性能:与SIFT算法相比,AKAZE算法采用了加速非线性扩散方法来构建尺度空间,具有更快的运行速度。
- 稳健性:AKAZE算法对噪声和干扰具有较强的鲁棒性,能够提取出较为稳健的特征点。
然而,AKAZE算法也存在一些不足之处:
- 对光照变化敏感:AKAZE算法对光照变化较为敏感,可能会受到光照变化的影响。
- 对局部变化敏感:AKAZE算法对局部变化较为敏感,可能会导致误检或漏检。
- 需要手动设置参数:AKAZE算法需要手动设置一些参数,如尺度空间级数、加速非线性扩散的迭代次数等。这些参数的设置会影响到算法的性能和准确性。
总之,特征点检测算法AKAZE是一种有效的图像特征提取方法,具有尺度不变性和旋转不变性等优点。在实际应用中表现出了良好的性能,可以应用于许多领域。然而,它也存在一些不足之处,如对光照变化敏感、对局部变化敏感以及需要手动设置参数等。未来可以进一步改进和完善AKAZE算法的性能和准确性。
三、代码
3.1、数据准备
代码需要的两张图,一个xml格式的文件,即:H1to3p.xml,如下:
<?xml version="1.0"?>
<opencv_storage>
<H13 type_id="opencv-matrix"><rows>3</rows><cols>3</cols><dt>d</dt><data>7.6285898e-01 -2.9922929e-01 2.2567123e+023.3443473e-01 1.0143901e+00 -7.6999973e+013.4663091e-04 -1.4364524e-05 1.0000000e+00 </data></H13>
</opencv_storage>


3.2、完整代码
代码:
from __future__ import print_function
import cv2 as cv
import numpy as np
import argparse
from math import sqrt# 读取两张图片
parser = argparse.ArgumentParser(description='Code for AKAZE local features matching tutorial.')
parser.add_argument('--input1', help='Path to input image 1.', default='graf1.png') # 在这里设置图像1
parser.add_argument('--input2', help='Path to input image 2.', default='graf3.png') # 在这里设置图像2
parser.add_argument('--homography', help='Path to the homography matrix.', default='H1to3p.xml') # 在这里设置H矩阵
args = parser.parse_args()img1 = cv.imread(cv.samples.findFile(args.input1), cv.IMREAD_GRAYSCALE)
img2 = cv.imread(cv.samples.findFile(args.input2), cv.IMREAD_GRAYSCALE)
if img1 is None or img2 is None:print('Could not open or find the images!')exit(0)
fs = cv.FileStorage(cv.samples.findFile(args.homography), cv.FILE_STORAGE_READ)
homography = fs.getFirstTopLevelNode().mat()## 初始化算法[AKAZE]
akaze = cv.AKAZE_create()
# 检测图像1和图像2的特征点和特征向量
kpts1, desc1 = akaze.detectAndCompute(img1, None)
kpts2, desc2 = akaze.detectAndCompute(img2, None)## 基于汉明距离,使用暴力匹配来匹配特征点
matcher = cv.DescriptorMatcher_create(cv.DescriptorMatcher_BRUTEFORCE_HAMMING)
nn_matches = matcher.knnMatch(desc1, desc2, 2)## 下面0.8默认参数,可以手动修改、调试
matched1 = []
matched2 = []
nn_match_ratio = 0.8 # 最近邻匹配参数
for m, n in nn_matches:if m.distance < nn_match_ratio * n.distance:matched1.append(kpts1[m.queryIdx])matched2.append(kpts2[m.trainIdx])## 使用单应矩阵进行精匹配,进一步剔除误匹配点
inliers1 = []
inliers2 = []
good_matches = []
inlier_threshold = 2.5 # 如果两个点距离小于这个值,表明足够近,也就是一对匹配对
for i, m in enumerate(matched1):col = np.ones((3,1), dtype=np.float64)col[0:2,0] = m.ptcol = np.dot(homography, col)col /= col[2,0]dist = sqrt(pow(col[0,0] - matched2[i].pt[0], 2) +\pow(col[1,0] - matched2[i].pt[1], 2))if dist < inlier_threshold:good_matches.append(cv.DMatch(len(inliers1), len(inliers2), 0))inliers1.append(matched1[i])inliers2.append(matched2[i])## 可视化
res = np.empty((max(img1.shape[0], img2.shape[0]), img1.shape[1]+img2.shape[1], 3), dtype=np.uint8)
cv.drawMatches(img1, inliers1, img2, inliers2, good_matches, res)
cv.imwrite("akaze_result.png", res)inlier_ratio = len(inliers1) / float(len(matched1))
print('A-KAZE Matching Results')
print('*******************************')
print('# Keypoints 1: \t', len(kpts1))
print('# Keypoints 2: \t', len(kpts2))
print('# Matches: \t', len(matched1))
print('# Inliers: \t', len(inliers1))
print('# Inliers Ratio: \t', inlier_ratio)cv.imshow('result', res)
cv.waitKey()