将sRGB格式的图片转换为BT.2020格式涉及到两个步骤:首先将sRGB转换到线性RGB,然后将线性RGB转换到BT.2020。这是因为sRGB图像通常使用伽马校正,而BT.2020工作在线性色彩空间中。
-
从sRGB到线性RGB:sRGB图像首先需要进行伽马校正解码转换为线性RGB。这个过程通常不是通过一个简单的线性矩阵实现的,而是通过以下公式:
[
C_{linear} = \begin{cases}
\frac{C_{sRGB}}{12.92}, & \text{if } C_{sRGB} \leq 0.04045 \
\left(\frac{C_{sRGB} + 0.055}{1.055}\right)^{2.4}, & \text{otherwise}
\end{cases}
]其中 (C_{linear}) 是线性RGB中的颜色分量值(红、绿、蓝),(C_{sRGB}) 是sRGB颜色空间中的对应分量值。
-
从线性RGB到BT.2020:接下来,您可以应用一个3x3的线性转换矩阵将线性RGB转换为BT.2020色彩空间。这个矩阵通常如下所示:
[
\begin{bmatrix}
R_{BT.2020} \
G_{BT.2020} \
B_{BT.2020}
\end{bmatrix}\begin{bmatrix}
0.6274 & 0.3293 & 0.0433 \
0.0691 & 0.9195 & 0.0114 \
0.0164 & 0.0880 & 0.8956
\end{bmatrix}
\cdot
\begin{bmatrix}
R_{linear} \
G_{linear} \
B_{linear}
\end{bmatrix}
]
在实际应用中,你首先需要编写代码将sRGB图像转换为线性RGB,然后再应用上述矩阵进行色彩空间的转换。以下是使用OpenCV在C++中实现这一过程的示例代码:
#include <opencv2/opencv.hpp>
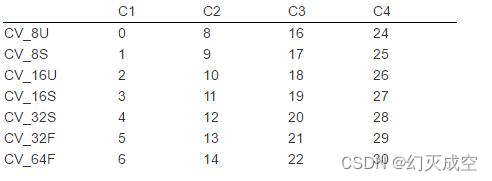
#include <cmath>cv::Mat sRGBToLinearRGB(const cv::Mat& srgbImage) {cv::Mat linearRGB(srgbImage.size(), srgbImage.type());// cv::Vec3b,static_cast<uchar> 这2个要根据图片格式选择合适的值srgbImage.forEach<cv::Vec3b>([&](cv::Vec3b &pixel, const int * position) -> void {for (int i = 0; i < 3; ++i) {float c = pixel[i] / 255.0f;c = c <= 0.04045f ? c / 12.92f : std::pow((c + 0.055f) / 1.055f, 2.4f);linearRGB.at<cv::Vec3b>(position)[i] = static_cast<uchar>(std::round(c * 255.0f));}});return linearRGB;
}int main() {// 假设你已经有了一个sRGB格式的cv::Mat对象 srgbImagecv::Mat srgbImage; // 加载你的sRGB图像// 将sRGB转换为线性RGBcv::Mat linearRGB = sRGBToLinearRGB(srgbImage);// 定义从线性RGB到BT.2020的转换矩阵cv::Matx33f transformMatrix(0.6274, 0.3293, 0.0433,0.0691, 0.9195, 0.0114,0.0164, 0.0880, 0.8956);// 应用转换矩阵cv::Mat bt2020Image;cv::transform(linearRGB, bt2020Image, transformMatrix);// bt2020Image现在包含转换后的图像return 0;
}
cv::Mat sRGBToLinearRGB(const cv::Mat& srgbImage) {cv::Mat linearRGB(srgbImage.size(), srgbImage.type());srgbImage.forEach<cv::Vec3f>([&](cv::Vec3f &pixel, const int * position) -> void {for (int i = 0; i < 3; ++i) {float c = pixel[i] / 255.0f;auto c2 = (c <= 0.04045f) ? (c / 12.92f) : std::pow((c + 0.055f) / 1.055f, 2.4f);auto val = static_cast<float>(std::round(c2 * 255.0f));qDebug() << QString("pixel[i] = %1, c1 = %2, c2 = %3, val = %4").arg(pixel[i]).arg(c).arg(c2).arg(val);linearRGB.at<cv::Vec3f>(position)[i] = val;}});return linearRGB;}cv::Mat Image_sRGB_BT2020(const cv::Mat &src){cv::Mat dst = src;// 确保使用浮点数src.convertTo(dst, CV_32F);// 将sRGB转换为线性RGBcv::Mat linearRGB = sRGBToLinearRGB(dst);// 定义从线性RGB到BT.2020的转换矩阵cv::Matx33f transformMatrix(0.6274, 0.3293, 0.0433,0.0691, 0.9195, 0.0114,0.0164, 0.0880, 0.8956);// 应用转换矩阵cv::Mat bt2020Image;cv::transform(linearRGB, bt2020Image, transformMatrix);return bt2020Image;}