一、图像膨胀和图像腐蚀概念
我们先定义,需要处理的图片为二值化图像A。图片的背景色为黑色,即像素值为0。图片的目标色为白色,即像素值为1。
再定义一个结构元S,结构元范围内所有的像素为白色,像素值为1。
1、图像的膨胀
通俗点说:就是将图像的目标像素往外扩张,使目标的尺寸变大,从而达到膨胀的效果。
详细点说:一个结构元S从图像左上方开始遍历,结构元上任意一个元素与图像上目标元素重合时,此时将结构元锚点置的像素与对应图像位置的像素求“或运算”,更新像素值到此图像位置(即将结构元锚点位置对应的图像像素更新数值为1,即白色)。以此类推,遍历完图像后,得到的新的图像,即为膨胀后的图像。
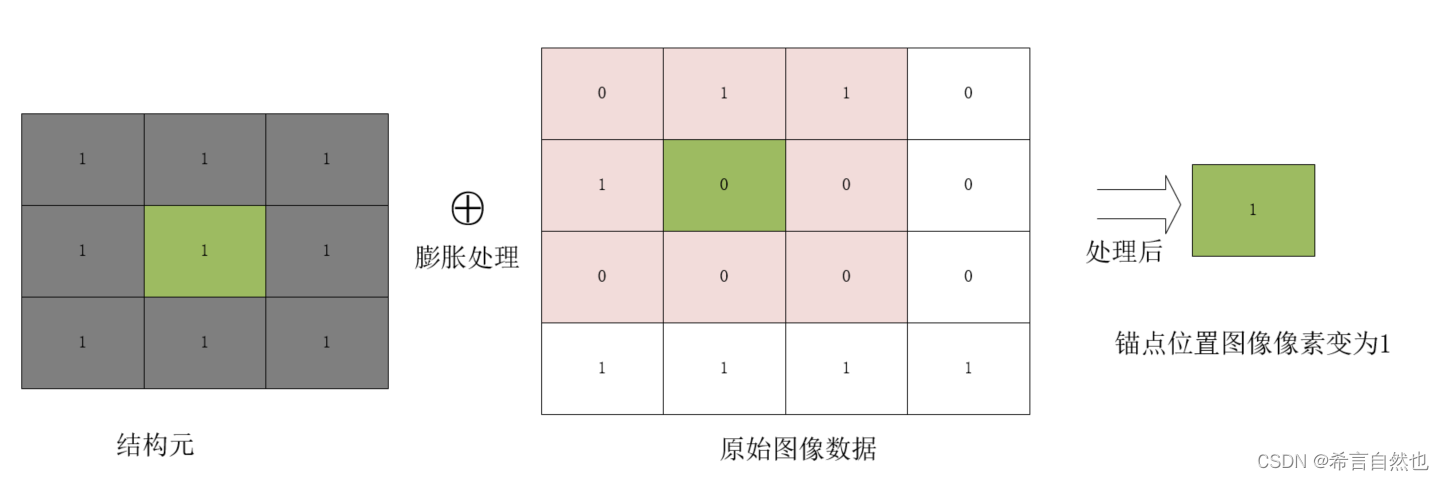
比如上图中,假设使用左侧的3x3结构元,遍历图像时,锚点遍历到原始图像绿色位置。此时可以看到,粉色区域存在数值为1的像素,按照膨胀运算,此时将结构元锚点与原始图像锚点像素进行“或运算”,最终处理后的膨胀像素为1。即原始图像的绿色位置的像素由0变成了1。
2、图像的腐蚀
通俗点说:就是将图像的目标像素往内收缩,使目标的尺寸变小,从而实现腐蚀的效果。
详细点说:一个结构元S从图像的左上方开始遍历,若结构元所在的图像区域内,像素值全部为1,那么保持结构元锚点位置的像素值为1,即白色;否则,锚点位置的像素值为0,即黑色。遍历完图像后,得到的新图像,即为腐蚀后的图像。

比如上图中,假设使用左侧的3x3结构元,遍历图像时,锚点遍历到原始图像绿色位置。此时可以看到,粉色区域存在数值为0的像素,按照腐蚀运算,锚点处最终处理后的膨胀像素为0。即原始图像的绿色位置的像素由1变成了0。
二、HLS实现
可能不同资料中讲述腐蚀核膨胀的概念会略有区别,但是核心内容是不变的。本文中重点分析vitis HLS的库函数xf_dilation.hpp和xf_erosion.hpp。
1、xf_dilation.hpp
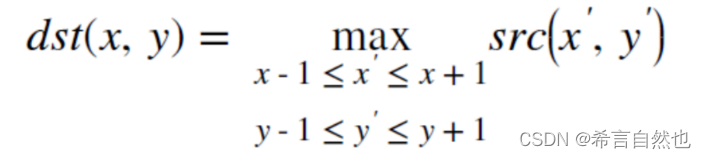
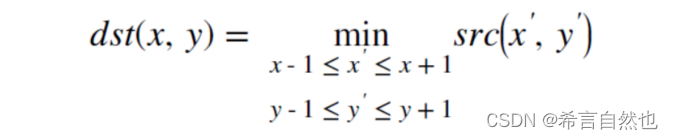
在AMD赛灵思提供的解释中,图像膨胀处理,即当前像素被NxN邻域中强度最大值代替。公式表示如下:
其库函数的调用模板和解释见下面代码:
template <int BORDER_TYPE, //边界处理方式,目前仅支持XF_BORDER_CONSTANTint TYPE, //图像类型,目前支持8UC1和8UC3int ROWS, //图像最大行数int COLS, //图像最大列数int K_SHAPE, //结构元的形状,支持矩形、十字形和圆形int K_ROWS, //结构元行数int K_COLS, //结构元列数int ITERATIONS, //迭代次数,仅在结构元为矩形时支持多次迭代int NPC = 1, //单个时钟处理的像素数int XFCVDEPTH_IN_1 = _XFCVDEPTH_DEFAULT, //输入图像深度int XFCVDEPTH_OUT_1 = _XFCVDEPTH_DEFAULT> //输出图像深度
void dilate(xf::cv::Mat<TYPE, ROWS, COLS, NPC, XFCVDEPTH_IN_1>& _src, //输入图像xf::cv::Mat<TYPE, ROWS, COLS, NPC, XFCVDEPTH_OUT_1>& _dst, //输出图像unsigned char _kernel[K_ROWS * K_COLS]) //输入的结构元数值,处理二值化图像时一般默认都为1如何使用该函数,可以自行参考赛灵思提供的示例demo,不再赘述。下面主要解析HLS是怎么实现膨胀运算处理的。
打开xf_dilation.hpp文件,我们可以看到其c++代码。主要的调用函数有4个如下:

dilate函数:判断输入图像大小与边界处理方式是否满足函数要求。根据结构元调整参数处理图像膨胀。此函数不进行具体的膨胀处理。
xfdilate函数:根据结构元大小,考虑到边界情况,创建buf(buf包含图像边界以外行的像素值,初值赋为0)。以便处理第一行图像像素的膨胀。该函数主要考虑行边界预处理,缓存图像数据的数组定义为buf。
Process_function_d函数:根据结构元大小。考虑到边界情况,给src_buf赋予初值(初值为0),以便处理第1列图像像素的膨胀,。该函数主要考虑列边界的预处理,缓存图像数据的数组定义为src_buf,最后得到与结构元大小一致的src_buf_temp_med_apply,然后提取送入到膨胀处理模块进行处理。
dilate_function_apply函数:该函数判断窗口区域的图像数据中的最大值,赋值给锚点。该函数为图像膨胀的核心处理函数。
下面举例说明膨胀函数的处理方式:以8*8的二值化8bits深度的图像,结构元大小为3*3的矩形,NPPC=1。(选取这些参数主要是为了减少篇幅且容易理解)
第一步:在dilate函数判断图像,结构元类型、迭代次数等信息是否满足要求。
第二步:xfdilate函数中创建buf数组,数组的大小为buf[3][8]。并且给buf赋予初值。buf[0]的8个像素值均赋为0;buf[1]的8个像素赋值为原始图像的第一行图像数据。如下图。

第三步:执行Process_function_d函数。首先读取图像2行的原始数据,保存至buf[2]中。此时buf数据更新为下图。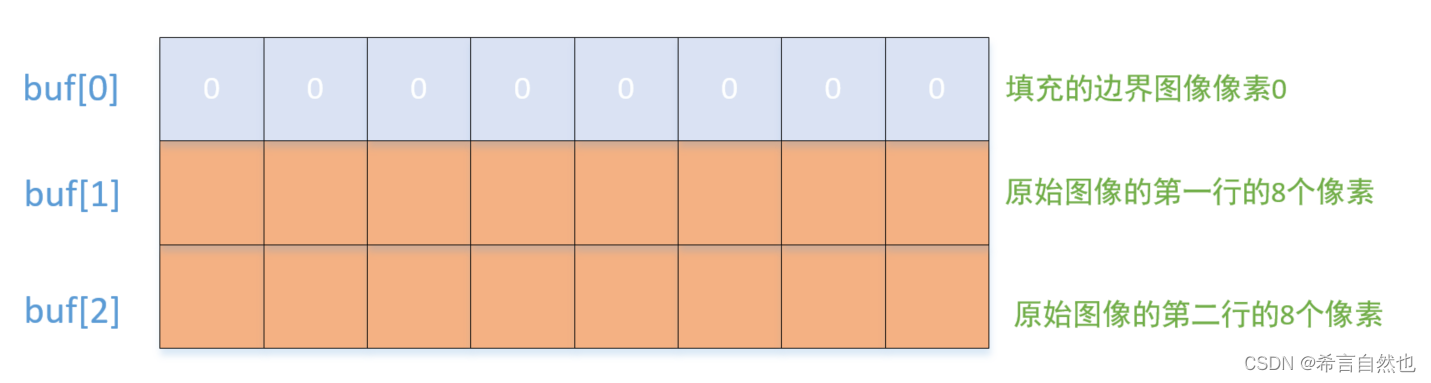
此时我们要用到一个新的数组src_buf,其大小为src_buf[3][3]。其初值皆为0。buf数组经过buf_cop数组和src_buf_temp_copy_extract的一系列转换,最终会得到如下的src_buf数组,如下图:
此时位于src_buf中的的锚点位置在原始图像之外,所以函数中存在一个start_write标志,用于控制何时将锚点结果写入到_dst中。很明显,锚点在图像边界之外的结果不写入到_dst矩阵中。
第四步:在dilate_function_apply函数中,比较src_buf中的像素结果,将src_buf的最大值赋值输出,最后判断是否在图像边界外,若在图像区域内,则写入到_dst矩阵中。
综上,循环执行第三步和第四步,根据图像行列数据的读取,更新buf和src_buf中的数据,遍历完成完图像后,膨胀操作完成。
2、xf_erosion.hpp
在AMD赛灵思提供的解释中,图像腐蚀处理,即当前像素被NxN邻域中强度最小值代替。公式表示如下:
其库函数的调用模板和解释见下面代码:
template <int BORDER_TYPE, //边界处理方式,目前仅支持XF_BORDER_CONSTANTint TYPE, //图像类型,目前支持8UC1和8UC3int ROWS, //图像最大行数int COLS, //图像最大列数int K_SHAPE, //结构元的形状,支持矩形、十字形和圆形int K_ROWS, //结构元行数int K_COLS, //结构元列数int ITERATIONS, //迭代次数,仅在结构元为矩形时支持多次迭代int NPC = 1, //单个时钟处理的像素数int XFCVDEPTH_IN_1 = _XFCVDEPTH_DEFAULT, //输入图像深度int XFCVDEPTH_OUT_1 = _XFCVDEPTH_DEFAULT> //输出图像深度
void erode(xf::cv::Mat<TYPE, ROWS, COLS, NPC, XFCVDEPTH_IN_1>& _src, //输入图像xf::cv::Mat<TYPE, ROWS, COLS, NPC, XFCVDEPTH_OUT_1>& _dst, //输出图像unsigned char _kernel[K_ROWS * K_COLS]) //输入的结构元数值,处理二值化图像时一般默认都为1腐蚀函数与膨胀函数的处理方式几乎相同,仅在最后的function_apply中,由取最大值更改为取最小值。所以不再增加篇幅描述了。只要明白了膨胀函数的原理,腐蚀函数自然也不在话下。
这里需要提一下的是,如果你需要使用的结构元kernel的列数大于15,则该库函数工作可能不正常,这是由赛灵思库函数的运算算法决定的,感兴趣的可以再自己研究一下。