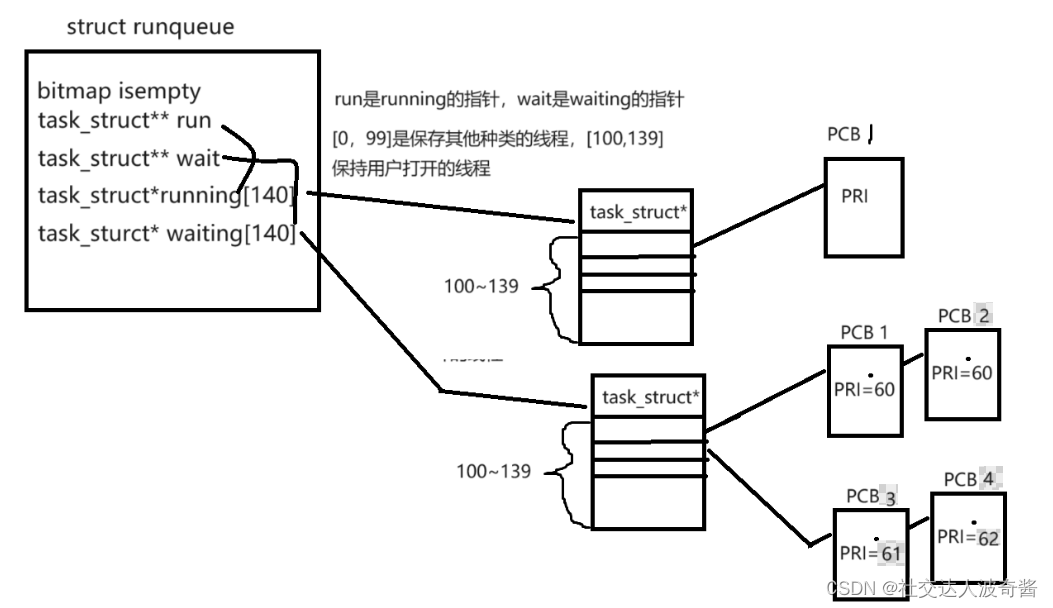
说在前面
🎈不知道大家对于算法的学习是一个怎样的心态呢?为了面试还是因为兴趣?不管是出于什么原因,算法学习需要持续保持。
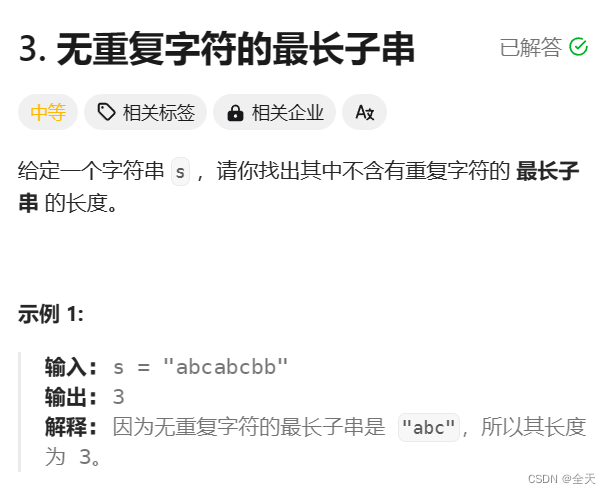
问题描述
给你一个下标从 0 开始的整数矩阵 grid ,矩阵大小为 m x n ,由从 0 到 m * n - 1 的不同整数组成。你可以在此矩阵中,从一个单元格移动到 下一行 的任何其他单元格。如果你位于单元格 (x, y) ,且满足 x < m - 1 ,你可以移动到 (x + 1, 0), (x + 1, 1), …, (x + 1, n - 1) 中的任何一个单元格。注意: 在最后一行中的单元格不能触发移动。
每次可能的移动都需要付出对应的代价,代价用一个下标从 0 开始的二维数组 moveCost 表示,该数组大小为 (m * n) x n ,其中 moveCost[i][j] 是从值为 i 的单元格移动到下一行第 j 列单元格的代价。从 grid 最后一行的单元格移动的代价可以忽略。
grid 一条路径的代价是:所有路径经过的单元格的 值之和 加上 所有移动的 代价之和 。从 第一行 任意单元格出发,返回到达 最后一行 任意单元格的最小路径代价。
示例 1:
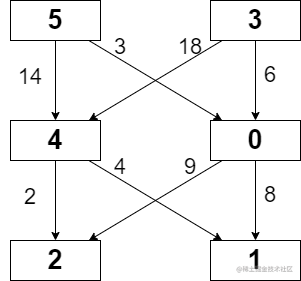
输入:grid = [[5,3],[4,0],[2,1]], moveCost = [[9,8],[1,5],[10,12],[18,6],[2,4],[14,3]]
输出:17
解释:最小代价的路径是 5 -> 0 -> 1 。
- 路径途经单元格值之和 5 + 0 + 1 = 6 。
- 从 5 移动到 0 的代价为 3 。
- 从 0 移动到 1 的代价为 8 。
路径总代价为 6 + 3 + 8 = 17 。
示例 2:
输入:grid = [[5,1,2],[4,0,3]], moveCost = [[12,10,15],[20,23,8],[21,7,1],[8,1,13],[9,10,25],[5,3,2]]
输出:6
解释:
最小代价的路径是 2 -> 3 。
- 路径途经单元格值之和 2 + 3 = 5 。
- 从 2 移动到 3 的代价为 1 。
路径总代价为 5 + 1 = 6 。
提示:
m == grid.length
n == grid[i].length
2 <= m, n <= 50
grid 由从 0 到 m * n - 1 的不同整数组成
moveCost.length == m * n
moveCost[i].length == n
1 <= moveCost[i][j] <= 100
思路分析
这道题目其实并不难,难的是对于题目的理解,题目有点长和绕,我们需要仔细阅读清楚题目给的信息,结合示例一的图片进行理解会更清晰。
- 1、题目会给出一个 m * n 的矩阵;
一个下标从 0 开始的整数矩阵 grid ,矩阵大小为 m x n ,由从 0 到 m * n - 1 的不同整数组成。
- 2、每一行的格子可以移动到下一行的任意一格;
在此矩阵中,从一个单元格移动到 下一行 的任何其他单元格。如果你位于单元格 (x, y) ,且满足 x < m - 1 ,你可以移动到 (x + 1, 0), (x + 1, 1), …, (x + 1, n - 1) 中的任何一个单元格。
- 3、moveCost[i][j]表示从值为 i 的单元格移动到下一行第 j 列单元格的代价
每次可能的移动都需要付出对应的代价,代价用一个下标从 0 开始的二维数组 moveCost 表示,该数组大小为 (m * n) x n ,其中 moveCost[i][j] 是从值为 i 的单元格移动到下一行第 j 列单元格的代价。
- 4、求从 第一行 任意单元格出发,返回到达 最后一行 任意单元格的最小路径代价。
grid 一条路径的代价是:所有路径经过的单元格的 值之和 加上 所有移动的 代价之和 。从 第一行 任意单元格出发,返回到达 最后一行 任意单元格的最小路径代价。
理清楚上面的这四个信息之后,我们可以发现这是一道经典的dp动态规划的题目,我们每一个格子的上一步只能是上一行的某一格,我们只需要自顶向下求出移动到每一个格子的最下代价即可。
遍历矩阵的每一个格子,维护上一行到当前格子的最小代价,最后求出最后一行的格子的最小代价即可。
AC代码
/*** @param {number[][]} grid* @param {number[][]} moveCost* @return {number}*/var minPathCost = function(grid, moveCost) {let dp = new Array(grid.length);let res = Infinity;for(let i = 0; i < dp.length; i++){dp[i] = new Array(grid[i].length).fill(0);for(let j = 0; j < dp[i].length; j++){if(i === 0) dp[i][j] = grid[i][j];else{let temp = Infinity;for(let k = 0; k < dp[i].length; k++){temp = Math.min(temp,dp[i - 1][k] + moveCost[grid[i - 1][k]][j]);}dp[i][j] = temp + grid[i][j];}if(i == grid.length - 1){res = Math.min(dp[i][j],res);}}}return res;
};
公众号
关注公众号『前端也能这么有趣』,获取更多有趣内容。
说在后面
🎉 这里是 JYeontu,现在是一名前端工程师,有空会刷刷算法题,平时喜欢打羽毛球 🏸 ,平时也喜欢写些东西,既为自己记录 📋,也希望可以对大家有那么一丢丢的帮助,写的不好望多多谅解 🙇,写错的地方望指出,定会认真改进 😊,偶尔也会在自己的公众号『
前端也能这么有趣』发一些比较有趣的文章,有兴趣的也可以关注下。在此谢谢大家的支持,我们下文再见 🙌。