原因,vio与global没有yaw角度同步,各自为政,两者通过一个变换T维持关系。
看着碍眼,所以打算改了。
之前试过几个方案,比如先跑一次bag,记录VIO与global的后验角度与偏差,写一个程序,把整个global输出的csv文件转换一次,最后才会cloudcompare去看。
但是觉得这玩意一方面流程繁琐,一方面不实时,最后还是对rviz显示下手了。
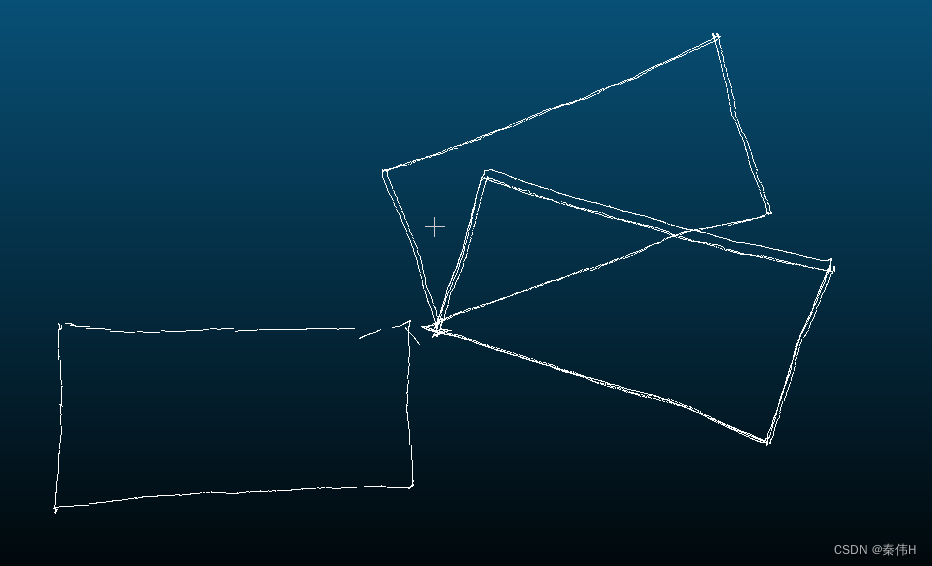
简单修改,额外加了一个path消息,global_path_rot,专门把VIO和global的旋转给逆回去了,注意不要乱动T,目标不是硬重叠,只是别像蓝色偏差角度那么大,T留着还有点用,另外T还是跟随优化的动态的。
图中:绿色VIO,蓝色global,黄色global_rot。