大家好,我是微学AI,今天给大家介绍一下计算机视觉的应用22-基于计算机视觉领域与VR虚拟现实眼镜,构思考虑远程协助独居老人生活起居的应用,在当下信息科技飞速发展的社会背景下,老龄化问题日益凸显。越来越多的老年人选择独居,但由于身体原因无法完全自理。为了解决这一问题,我们需要寻求创新的解决方案。本文将介绍一种基于虚拟现实(VR)眼镜和远程操控机器人的新方法,旨在帮助老年人改善生活质量。

创新点1:VR虚拟现实眼镜
首先,让我们来看看如何使用VR虚拟现实眼镜进行远程协助。在此系统中,护理工作者可以通过戴上VR设备,在三维空间中模仿真实环境操作机器人。这样可以帮助老人拿水杯,倒开水,倒垃圾,切水果,整理房间等等。
VR虚拟现实的数学原理涉及到多个学科和领域,包括几何学、图形学、物理学、计算机科学等。其中,重要的数学原理包括投影变换、视锥体裁剪、三维坐标系转换、照明模型等。
投影变换是将三维空间中的场景投影到二维屏幕上的过程。常用的投影变换有透视投影和正交投影两种。透视投影模拟了人眼看到物体时的效果,而正交投影则将物体投影到平行于屏幕的平面上。
视锥体裁剪是指需要将场景中只能看见一部分的物体进行裁剪,以提高画面渲染性能。通常采用的方法是将视锥体截取屏幕前方的物体,并将其转化为透视或正交投影。三维坐标系转换是将物体的三维坐标系转换成屏幕的二维坐标系。这个过程需要考虑物体的旋转、缩放和平移等操作。
照明模型是指通过计算光线在物体表面反射和折射的情况,来模拟现实世界中的光照效果。常用的照明模型有Phong模型和Blinn-Phong模型等。这些数学原理和技术可以被整合在一起,用于VR虚拟现实中的三维场景建模、交互和渲染等。投影变换公式:
透视投影:
[ x p y p z p ] = [ f 0 0 0 0 f 0 0 0 0 A B 0 0 − 1 0 ] [ x w y w z w 1 ] \begin{bmatrix} x_p \\ y_p \\ z_p \end{bmatrix} = \begin{bmatrix} f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & A & B \\ 0 & 0 & -1 & 0 \end{bmatrix} \begin{bmatrix} x_w \\ y_w \\ z_w \\ 1 \end{bmatrix} xpypzp = f0000f0000A−100B0 xwywzw1
正交投影:
[ x p y p z p ] = [ 2 r − l 0 0 − r + l r − l 0 2 t − b 0 − t + b t − b 0 0 − 2 f − n − f + n f − n 0 0 0 1 ] [ x w y w z w 1 ] \begin{bmatrix} x_p \\ y_p \\ z_p \end{bmatrix} = \begin{bmatrix} \frac{2}{r-l} & 0 & 0 & -\frac{r+l}{r-l} \\ 0 & \frac{2}{t-b} & 0 & -\frac{t+b}{t-b} \\ 0 & 0 & \frac{-2}{f-n} & -\frac{f+n}{f-n} \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x_w \\ y_w \\ z_w \\ 1 \end{bmatrix} xpypzp = r−l20000t−b20000f−n−20−r−lr+l−t−bt+b−f−nf+n1 xwywzw1
技术详解:计算机视觉和深度学习
为了使得VR设备能够准确地捕捉到用户的动作并将其转化为机器人可执行的命令,我们需要利用计算机视觉(Computer Vision)和深度学习技术。
计算机视觉是一门致力于让计算设备“看见”并理解图像信息的科学领域。在此项目中, 我们主要使用计算机视觉来识别、跟踪用户的手部动作,根据动作图像识别技术,并生成相应指令供给远程操作的机器人,最终传递动作信息指令到机械臂,完成VR环境中的用户实时动作。
我们可以基于PyTorch框架, 快速地构建、训练以及测试神经网络模型。
主要代码片段样例:
import torch
import torchvision.transforms as transforms
from torchvision.models import resnet50 # 加载预训练模型
model = resnet50(pretrained=True)# 定义变换函数
transform = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])# 加载图片并进行预处理
image = Image.open("hand.jpg")
image = transform(image).unsqueeze(0)# 进行推理
model.eval()
with torch.no_grad():output = model(image)
创新点2:远程操控机器人
在VR设备接收到用户的动作指令后,这些指令将通过互联网传输给远程的机器人。机器人根据接收到的指令,模仿用户的动作来照顾老年人。
技术详解:远程控制和实时反馈
为了使得机器人能够准确地执行命令并能够提供实时反馈,我们需要利用远程控制(Remote Control)和实时反馈(Real-time Feedback)技术。
我们使用了VR虚拟现实眼镜来进行远程操控机器人。具体的操作流程和关键技术点如下:
1. 捕捉用户动作
首先,我们需要通过VR设备捕捉到用户的动作。这一步骤主要依赖于VR设备内部的运动传感器和外部的定位系统。
运动传感器(例如陀螺仪、加速度计等)能够检测设备自身在空间中的位置和姿态变化,而外部定位系统(例如光学追踪、电磁追踪等)则可以确定设备相对于环境的位置和方向。
2. 动作识别与转换
当我们获取到用户动作数据后,接下来就需要对这些数据进行处理,将其转换为机器人可以理解并执行的指令。这个过程主要包含两个步骤:手势识别和命令生成。
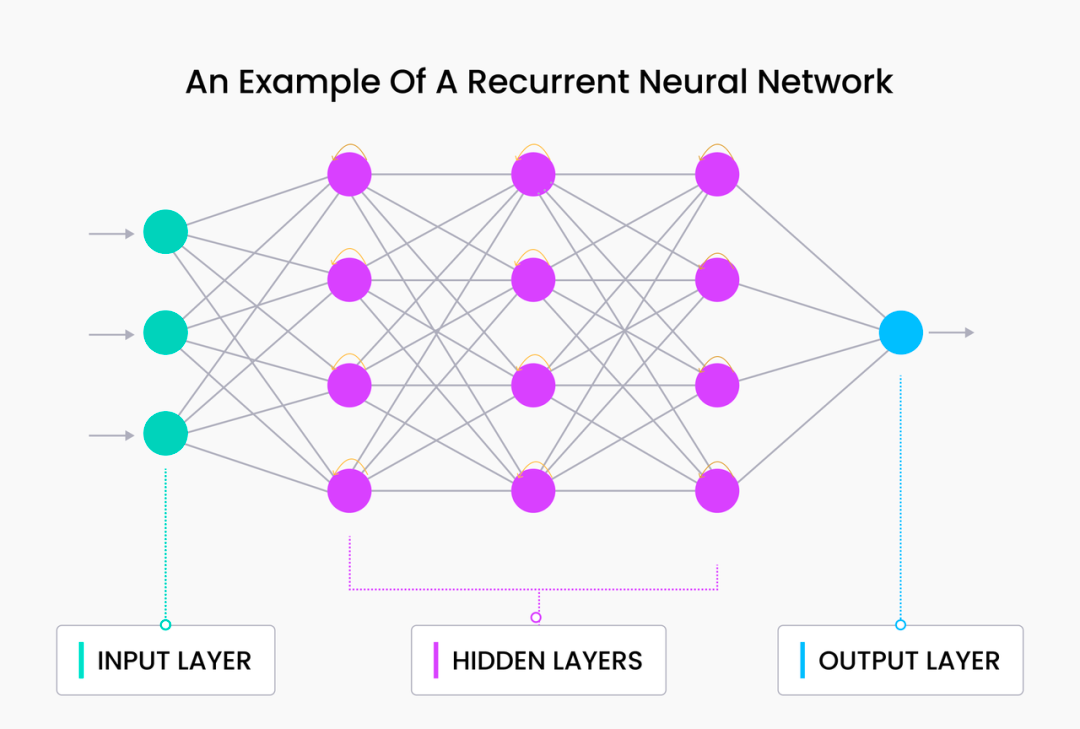
手势识别是一个复杂且关键的步骤。在此过程中,我们利用深度学习模型(例如卷积神经网络CNN)来从原始数据中提取特征,并根据这些特征判断出用户正在做出何种手势。命令生成则是根据已经识别出来的手势,生成相应的指令供给机器人执行。例如,“握拳”可能被转换为“抓取”指令。
3. 通信传输
完成动作识别与转换后,接下来就是将生成的指令通过网络发送给远程的机器人。这个过程中,可能会用到各种不同的通信协议和技术,例如Wi-Fi、蓝牙、LTE、5G等。为了保证实时性和可靠性,我们需要选择合适的传输协议(例如TCP或UDP),并可能需要进行一些网络优化(例如QoS质量服务)。
4. 机器人执行
当机器人接收到指令后,就会根据其内部控制系统来执行相应的动作。这个过程中涉及到很多复杂的机械和电子技术。比如,在一个抓取任务中,机器人需要先计算目标物体的位置和形状(可能需要用到计算机视觉技术),然后规划出一条能够成功抓取物体且不碰撞到其他障碍物的路径(可能需要用到路径规划算法),最后通过驱动各个关节来实现这个路径(可能需要用到伺服电机控制技术)。
5. 反馈信息
在执行任务时,机器人还会将其状态信息反馈给用户。这些信息可以包括当前位置、速度、力度等数据,也可以是摄像头捕捉到的图像或者环境传感器检测到的数据。通过VR设备展示这些反馈信息,用户就可以像亲身处于远程环境一样去操作和感知机器人了。比如,在VR眼镜上显示摄像头图像就能让用户看见远程环境;而通过振动反馈装置模拟触觉就能让用户感受到手上持有工具时产生的震动等等。

主要代码片段:
import socketdef send_command_to_robot(command):# 创建socket对象s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)# 连接目标IP和端口s.connect(('192.168.1.100', 8888))# 发送数据s.sendall(command.encode())# 接收返回数据 data = s.recv(1024)print('Received', repr(data))send_command_to_robot("move forward")
结论
VR眼镜操控机器人的应用场景:
1.远程医疗服务:
通过VR眼镜,医生可以远程操作机器人进行手术或者其他治疗程序。这对于地理位置偏远或者高级医疗资源稀缺的地区来说是一项重要的技术。
2.灾难救援:
在火灾、地震等自然灾害中,使用VR眼镜操控的机器人可以进入危险环境进行搜索和救援工作,减少人员伤亡。
3.深海/太空探索:
使用VR眼镜操控的机器人能够进入深海或者太空进行科学研究和探索,这些环境对于人类来说是非常危险甚至无法到达的。
4.军事应用:
在战场上,使用VR眼镜操控的无人机或者陆地机器人可以执行侦查、攻击等任务,同时减少士兵在战场上的风险。
5.教育培训:
通过VR眼镜操控的机器人,学生可以在远程进行实验或者模拟操作。这对于医学、工程等需要大量实践的专业来说非常有用。
6.建筑和工程:
在复杂和危险的建筑环境中,使用VR眼镜操控的机器人可以进行精确测量、质量检查等任务,提高工作效率和安全性。
7.农业自动化:
通过VR眼镜远程操控农业机器人进行播种、收割、施肥等各种农田作业,减轻农民劳动强度并提高生产效率。
8.野生动物研究:
科研人员可以使用VR眼镜远程操控机器人在野外对野生动物进行观察和研究,避免干扰到它们的正常活动。
9.能源行业:
在核电站或其他危险环境中,使用VR眼镜操控的机器人可以执行维护、检修等任务,避免人员直接暴露在危险环境中。
10.娱乐行业:
在电影制作或者游戏开发中,利用VR眼镜远程操控机器人来创建逼真的特效或者场景。例如,在电影拍摄现场使用无人飞行设备获取空中视角。
以上系统考虑还处于初步阶段,并且还有许多技术问题待解决,但是它已经向我们展示了一种全新的可能性——通过使用最新的VR技术和机器人技术,我们可以更好地照顾那些无法完全自理生活起居的老年人。希望随着科学技术的进步,这种方法能够更广泛地应用于社会生活中。