小波变换
一维小波变换
因为存在 L 2 ( R ) = V j 0 ⊕ W j 0 ⊕ W j 0 + 1 ⊕ ⋯ L^{2}(\boldsymbol{R})=V_{j_{0}}\oplus W_{j_{0}}\oplus W_{j_{0}+1}\oplus\cdots L2(R)=Vj0⊕Wj0⊕Wj0+1⊕⋯,所以存在 f ( x ) f(x) f(x)可以在子空间 V j 0 V_{j_0} Vj0中用尺度函数展开和在子空间 W j 0 W j 0 + 1 , ⋯ W_{j_0}W_{j_{0+1}},\cdots Wj0Wj0+1,⋯中用某些数量的小波函数展开来表示。即
f ( x ) = ∑ k c j 0 ( k ) φ j 0 , k ( x ) + ∑ j = j 0 ∞ ∑ k d j ( k ) ψ j , k ( x ) f(x)=\sum_{k}c_{j_0}(k)\varphi_{j_0,k}(x)+\sum_{j=j_{0}}^{\infty}\sum_{k}d_{j}(k)\psi_{j,k}(x) f(x)=k∑cj0(k)φj0,k(x)+j=j0∑∞k∑dj(k)ψj,k(x)
其中 j 0 j_0 j0 是任意的开始尺度, c j 0 ( k ) c_{j_0}(k) cj0(k)通常称为近似和或尺度系数, d j ( k ) d_j(k) dj(k)称为细节和或小波系数。
由于双正交的性质可得
c j 0 ( k ) = ⟨ f ( x ) , φ j 0 , k ( x ) ⟩ = ∫ f ( x ) φ j 0 , k ( x ) d x d j ( k ) = ⟨ f ( x ) , ψ j , k ( x ) ⟩ = ∫ f ( x ) ψ j , k ( x ) d x c_{j_0}(k)=\Big\langle f(x),\varphi_{j_0,k}(x)\Big\rangle=\int f(x)\varphi_{j_0,k}(x)\mathrm{d}x\\ d_{j}(k)=\Big\langle f(x),\psi_{j,k}(x)\Big\rangle=\int f(x)\psi_{j,k}(x)\mathrm{d}x cj0(k)=⟨f(x),φj0,k(x)⟩=∫f(x)φj0,k(x)dxdj(k)=⟨f(x),ψj,k(x)⟩=∫f(x)ψj,k(x)dx
转换成离散形式可得
W φ ( j 0 , k ) = 1 M ∑ n f ( n ) φ j 0 , k ( n ) W ψ ( j , k ) = 1 M ∑ n f ( n ) ψ j , k ( n ) , j ≥ j 0 \begin{aligned} W_{\varphi}(j_{0},k)&=\frac{1}{\sqrt{M}}\sum_{n}f(n)\varphi_{j_{0},k}(n)\\ W_{\psi}(j,k)&=\frac{1}{\sqrt{M}}\sum_{n}f(n)\psi_{j,k}(n),\quad j\geq j_{0} \end{aligned} Wφ(j0,k)Wψ(j,k)=M1n∑f(n)φj0,k(n)=M1n∑f(n)ψj,k(n),j≥j0
其中 φ j 0 , k ( n ) \varphi_{j_0,k}(n) φj0,k(n) 和 ψ j , k ( n ) \psi_{j,k}(n) ψj,k(n)是基函数 φ j 0 , k ( x ) \varphi_{j_0,k}(x) φj0,k(x) 和 ψ j , k ( x ) \psi_{j,k}(x) ψj,k(x) 的取样形式。
由此可得
f ( n ) = 1 M ∑ k W φ ( j 0 , k ) φ j 0 , k ( n ) + 1 M ∑ j = j 0 ∞ ∑ k W ψ ( j , k ) ψ j , k ( n ) f(n)=\frac{1}{\sqrt{M}}\sum_{k}W_{\varphi}(j_{0},k)\varphi_{j_{0},k}(n)+\frac{1}{\sqrt{M}}\sum_{j=j_{0}}^{\infty}\sum_{k}W_{\psi}(j,k)\psi_{j,k}(n) f(n)=M1k∑Wφ(j0,k)φj0,k(n)+M1j=j0∑∞k∑Wψ(j,k)ψj,k(n)
通常 j 0 = 0 j_0=0 j0=0, M M M为2 的幂(即 M = 2 j ) M=2^{j}) M=2j)
而对于哈尔小波,离散的尺度和小波函数与 M × M M\times M M×M哈尔矩阵的行相对应,其中最小尺度为0,最大尺度为 j − 1 j-1 j−1
快速小波变换
对于图像的多分辨率变换
φ ( x ) = ∑ n h φ ( n ) 2 φ ( 2 x − n ) \varphi(x)=\sum_{n}h_{\varphi}(n)\sqrt{2}\varphi(2x-n) φ(x)=n∑hφ(n)2φ(2x−n)
并进行尺度化与平移操作,可得
φ ( 2 j x − k ) = ∑ n h φ ( n ) 2 φ ( 2 ( 2 j x − k ) − n ) = ∑ m h φ ( n ) 2 φ ( 2 j + 1 x − 2 k − n ) \begin{aligned} \varphi(2^{j}x-k) &=\sum_{n}h_{\varphi}(n)\sqrt{2}\varphi\left(2(2^{j}x-k)-n\right)\\ &=\sum_{m}h_{\varphi}(n)\sqrt{2}\varphi(2^{j+1}x-2k-n) \end{aligned} φ(2jx−k)=n∑hφ(n)2φ(2(2jx−k)−n)=m∑hφ(n)2φ(2j+1x−2k−n)
令 m = 2 k + n m=2k+n m=2k+n,可得
φ ( 2 j x − k ) = ∑ n h φ ( n ) 2 φ ( 2 ( 2 j x − k ) − n ) = ∑ m h φ ( n ) 2 φ ( 2 j + 1 x − 2 k − n ) = ∑ m h φ ( m − 2 k ) 2 φ ( 2 j + 1 x − m ) \begin{aligned} \begin{aligned} \varphi(2^{j}x-k) & =\sum_{n}h_{\varphi}(n)\sqrt{2}\varphi\left(2(2^{j}x-k)-n\right)\\ &=\sum_{m}h_{\varphi}(n)\sqrt{2}\varphi(2^{j+1}x-2k-n) \\ &=\sum_{m}h_{\varphi}(m-2k)\sqrt{2}\varphi(2^{j+1}x-m) \end{aligned} \end{aligned} φ(2jx−k)=n∑hφ(n)2φ(2(2jx−k)−n)=m∑hφ(n)2φ(2j+1x−2k−n)=m∑hφ(m−2k)2φ(2j+1x−m)
同理对于小波函数存在
ψ ( 2 j x − k ) = ∑ m h ψ ( m − 2 k ) 2 φ ( 2 j + 1 x − m ) \psi(2^{j}x-k)=\sum_{m}h_{\psi}(m-2k)\sqrt{2}\varphi(2^{j+1}x-m) ψ(2jx−k)=m∑hψ(m−2k)2φ(2j+1x−m)
其中将 ψ j , k ( x ) = 2 j / 2 ψ ( 2 j x − k ) \psi_{j,k}(x)=2^{j/2}\psi(2^{j}x-k) ψj,k(x)=2j/2ψ(2jx−k)代入 d j ( k ) = ⟨ f ( x ) , ψ j , k ( x ) ⟩ = ∫ f ( x ) ψ j , k ( x ) d x d_{j}(k)=\Big\langle f(x),\psi_{j,k}(x)\Big\rangle=\int f(x)\psi_{j,k}(x)\mathrm{d}x dj(k)=⟨f(x),ψj,k(x)⟩=∫f(x)ψj,k(x)dx可得
d j ( k ) = ∫ f ( x ) 2 j / 2 ψ ( 2 j x − k ) d x d_{j}(k)=\int f(x)2^{j/2}\psi(2^{j}x-k)\mathrm{d}x dj(k)=∫f(x)2j/2ψ(2jx−k)dx
又因为 ψ ( 2 j x − k ) = ∑ m h ψ ( m − 2 k ) 2 φ ( 2 j + 1 x − m ) \psi(2^{j}x-k)=\sum_{m}h_{\psi}(m-2k)\sqrt{2}\varphi(2^{j+1}x-m) ψ(2jx−k)=∑mhψ(m−2k)2φ(2j+1x−m)
所以存在
d j ( k ) = ∫ f ( x ) 2 j / 2 [ ∑ m h ψ ( m − 2 k ) 2 φ ( 2 j + 1 x − m ) ] d x = ∑ m h ψ ( m − 2 k ) [ ∫ f ( x ) 2 ( j + 1 ) / 2 φ ( 2 j + 1 x − m ) d x ] = ∑ m h ψ ( m − 2 k ) c j + 1 ( m ) \begin{aligned} d_{j}(k) &=\int f(x)2^{j/2}\biggl[\sum_{m}h_{\psi}(m-2k)\sqrt{2}\varphi(2^{j+1}x-m)\biggr]\mathrm{d}x\\ &=\sum_{m}h_{\psi}(m-2k)\biggl[\int f(x)2^{(j+1)/2}\varphi(2^{j+1}x-m)\mathrm{d}x\biggr]\\ &=\sum_{m}h_{\psi}(m-2k)c_{j+1}(m) \end{aligned} dj(k)=∫f(x)2j/2[m∑hψ(m−2k)2φ(2j+1x−m)]dx=m∑hψ(m−2k)[∫f(x)2(j+1)/2φ(2j+1x−m)dx]=m∑hψ(m−2k)cj+1(m)
同理可得
c j ( k ) = ∑ m h φ ( m − 2 k ) c j + 1 ( m ) c_{j}(k)=\sum_{m}h_{\varphi}(m-2k)c_{j+1}(m) cj(k)=m∑hφ(m−2k)cj+1(m)
即
W ψ ( j , k ) = ∑ m h ψ ( m − 2 k ) W φ ( j + 1 , m ) W φ ( j , k ) = ∑ m h φ ( m − 2 k ) W φ ( j + 1 , m ) \begin{aligned}W_{\psi}(j,k)&=\sum_{m}h_{\psi}(m-2k)W_{\varphi}(j+1,m)\\ W_{\varphi}(j,k)&=\sum_{m}h_{\varphi}(m-2k)W_{\varphi}(j+1,m)\end{aligned} Wψ(j,k)Wφ(j,k)=m∑hψ(m−2k)Wφ(j+1,m)=m∑hφ(m−2k)Wφ(j+1,m)
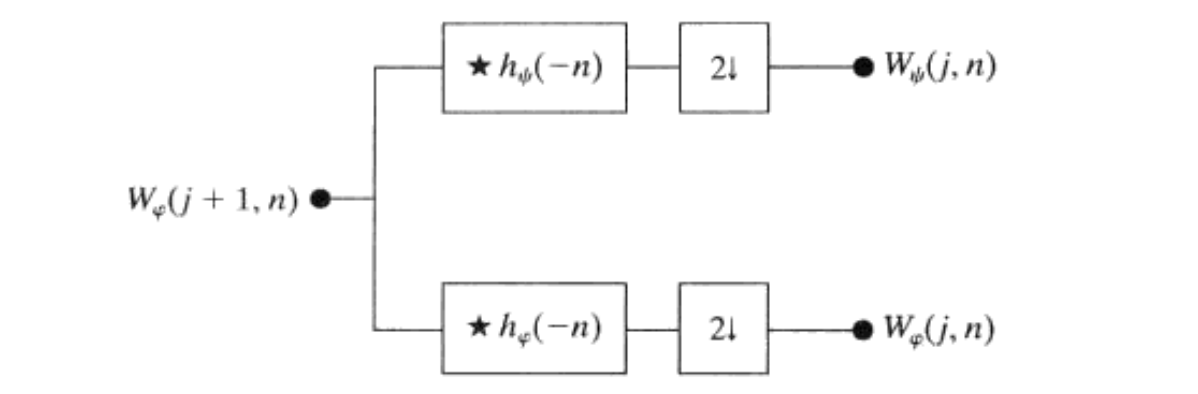
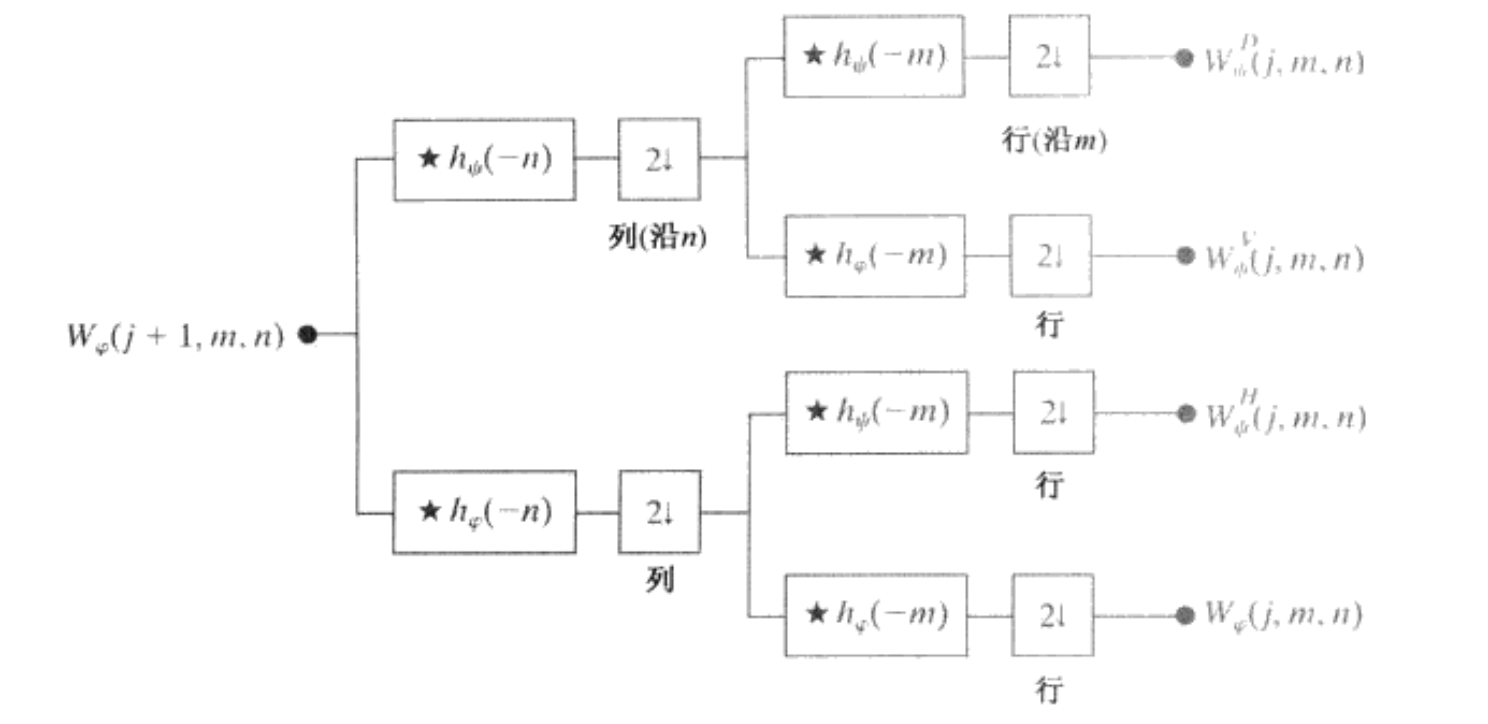
上式揭示了相邻尺度直接的离散小波变换(DWT)系数之间的关系,可以认为是 W φ ( j + 1 , m ) , W ψ ( j + 1 , m ) W_{\varphi}(j+1,m),W_{\psi}(j+1,m) Wφ(j+1,m),Wψ(j+1,m)分别与 h φ ( − n ) , h ψ ( − n ) h_{\varphi}(-n),h_{\psi}(-n) hφ(−n),hψ(−n)进行卷积操作并下采样得到的,于是可以写成
W ψ ( j , k ) = h ψ ( − n ) ⋆ W ϕ ( j + 1 , n ) ∣ n = 2 k , k ⩾ 0 W φ ( j , k ) = h φ ( − n ) ⋆ W φ ( j + 1 , n ) ∣ n = 2 k , k ⩾ 0 W_{\psi}(j,k)=h_{\psi}(-n)\star W_{\phi}(j+1,n)\Big|_{n=2k,k\geqslant0}\\\\W_{\varphi}(j,k)=h_{\varphi}(-n)\star W_{\varphi}(j+1,n)\Big|_{n=2k,k\geqslant0} Wψ(j,k)=hψ(−n)⋆Wϕ(j+1,n) n=2k,k⩾0Wφ(j,k)=hφ(−n)⋆Wφ(j+1,n) n=2k,k⩾0
即如下图所示的结构
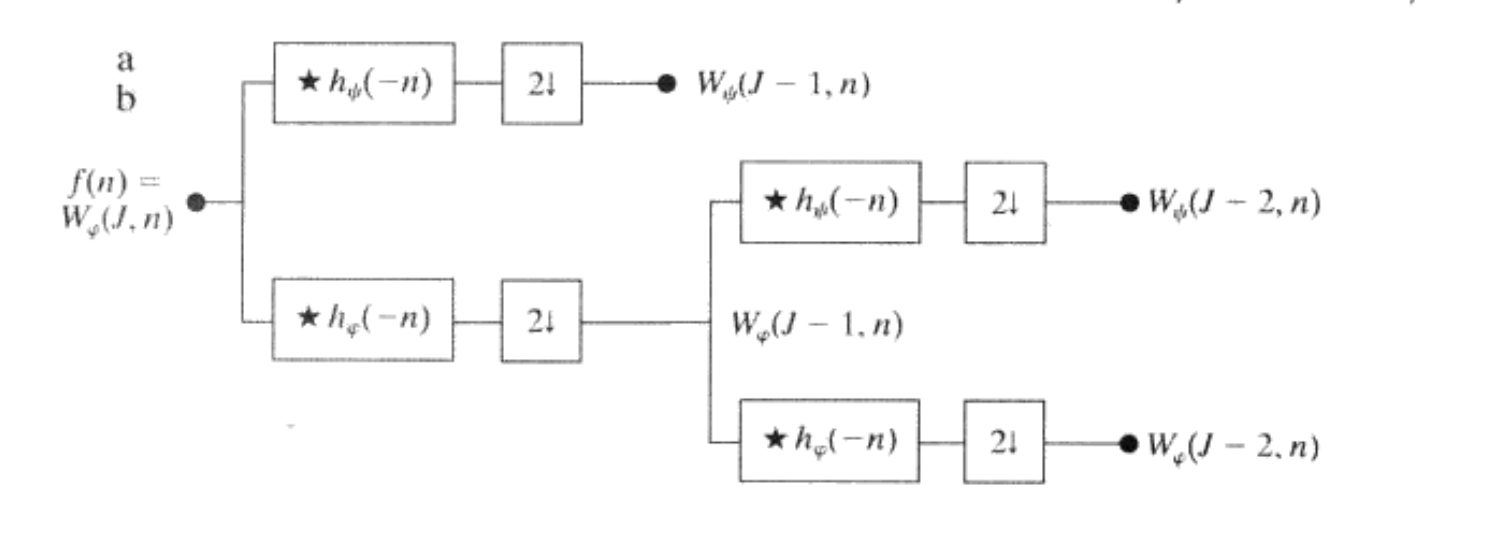
同时可以经过多次迭代分解,如下图是二级分解的结构
二维小波变换
为了将小波变换扩展到适应二维的图像,由此定义,存在尺度函数
φ ( x , y ) = φ ( x ) φ ( y ) \varphi(x,y)=\varphi(x)\varphi(y) φ(x,y)=φ(x)φ(y)
以及三个对方向敏感的小波函数
ψ H ( x , y ) = ψ ( x ) φ ( y ) ψ V ( x , y ) = φ ( x ) ψ ( y ) ψ D ( x , y ) = ψ ( x ) ψ ( y ) \begin{aligned} &\psi^{H}(x,y)=\psi(x)\varphi(y) \\ &\psi^{V}(x,y)=\varphi(x)\psi(y) \\ &\psi^{D}(x,y) =\psi(x)\psi(y) \end{aligned} ψH(x,y)=ψ(x)φ(y)ψV(x,y)=φ(x)ψ(y)ψD(x,y)=ψ(x)ψ(y)
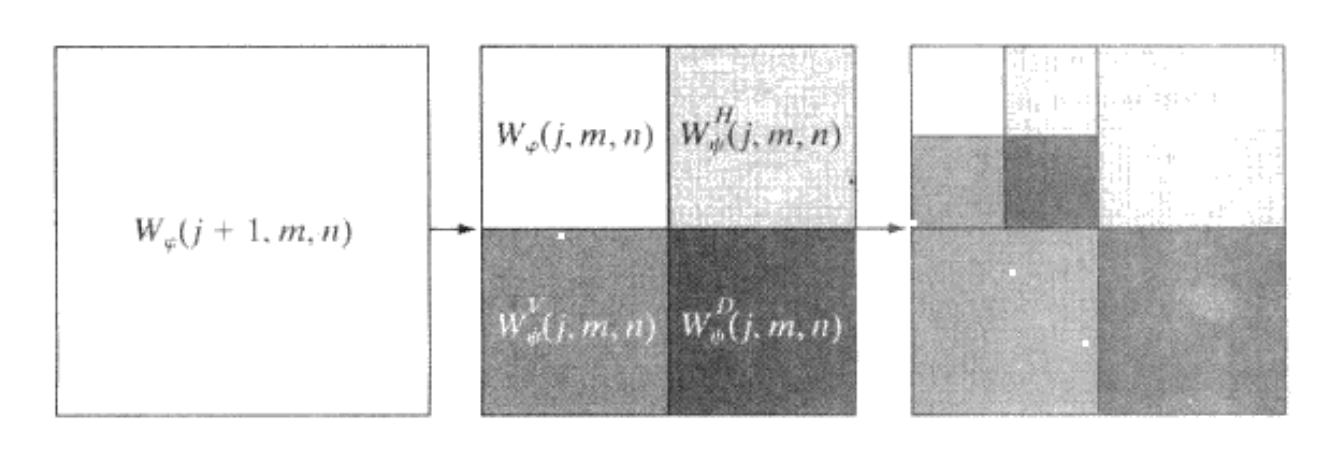
以上三个小波函数分别对应图像沿着列方向的变换、图像沿着行方向的变换、图像沿着对角线方向的变换
并存在
φ j , m , n ( x , y ) = 2 j / 2 φ ( 2 j x − m , 2 j y − n ) ψ j , m , n i ( x , y ) = 2 j / 2 ψ i ( 2 j x − m , 2 j y − n ) , i = { H , V , D } \begin{array}{c}{{\varphi_{j,m,n}(x,y)=2^{j/2}\varphi(2^{j}x-m,2^{j}y-n)}}\\{{\psi_{j,m,n}^{i}(x,y)=2^{j/2}\psi^{i}(2^{j}x-m,2^{j}y-n),i=\bigl\{H,V,D\bigr\}}}\\\end{array} φj,m,n(x,y)=2j/2φ(2jx−m,2jy−n)ψj,m,ni(x,y)=2j/2ψi(2jx−m,2jy−n),i={H,V,D}
并可以推导出离散形式的小波变换
W φ ( j 0 , m , n ) = 1 M N ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) φ j 0 , m , n ( x , y ) W ψ i ( j , m , n ) = 1 M N ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) ψ j , m , n i ( x , y ) , i = { H , V , D } \begin{aligned} W_{\varphi}(j_{0},m,n)&=\frac{1}{\sqrt{MN}}\sum_{x=0}^{M-1}\sum_{y=0}^{N-1}f(x,y)\varphi_{j_{0},m,n}(x,y)\\\\ W_{\psi}^{i}(j,m,n)&=\frac{1}{\sqrt{MN}}\sum_{x=0}^{M-1}\sum_{y=0}^{N-1}f(x,y)\psi_{j,m,n}^{i}(x,y),i=\{H,V,D\}\end{aligned} Wφ(j0,m,n)Wψi(j,m,n)=MN1x=0∑M−1y=0∑N−1f(x,y)φj0,m,n(x,y)=MN1x=0∑M−1y=0∑N−1f(x,y)ψj,m,ni(x,y),i={H,V,D}
其中 j 0 j_0 j0表示任意的开始尺度, W φ ( j 0 , m , n ) W_{\varphi}(j_{0},m,n) Wφ(j0,m,n)表示在尺度为 j 0 j_0 j0时的近似, W ψ i ( j , m , n ) , i = { H , V , D } W_{\psi}^{i}(j,m,n),i=\{H,V,D\} Wψi(j,m,n),i={H,V,D}表示对尺度为 j 0 j_0 j0时的水平、垂直与对角线方向的细节
当 j 0 = 0 , M = N = 2 j j_0=0,M=N=2^j j0=0,M=N=2j时,存在离散小波逆变换
f ( x , y ) = 1 M N ∑ m ∑ n W φ ( j 0 , m , n ) φ j 0 , m , n ( x , y ) + 1 M N ∑ i = H . V . D ∑ j = j 0 ∞ ∑ m ∑ n W ψ i ( j , m , n ) ψ j , m , n i ( x , y ) \begin{aligned} f(x,y)& =\frac{1}{\sqrt{MN}}\sum_{m}\sum_{n}W_{\varphi}(j_{0},m,n)\varphi_{j_{0},m,n}(x,y) \\ &+\frac{1}{\sqrt{MN}}\sum_{i=H.V.D}\sum_{j=j_{0}}^{\infty}\sum_{m}\sum_{n}W_{\psi}^{i}(j,m,n)\psi_{j,m,n}^{i}(x,y) \end{aligned} f(x,y)=MN1m∑n∑Wφ(j0,m,n)φj0,m,n(x,y)+MN1i=H.V.D∑j=j0∑∞m∑n∑Wψi(j,m,n)ψj,m,ni(x,y)
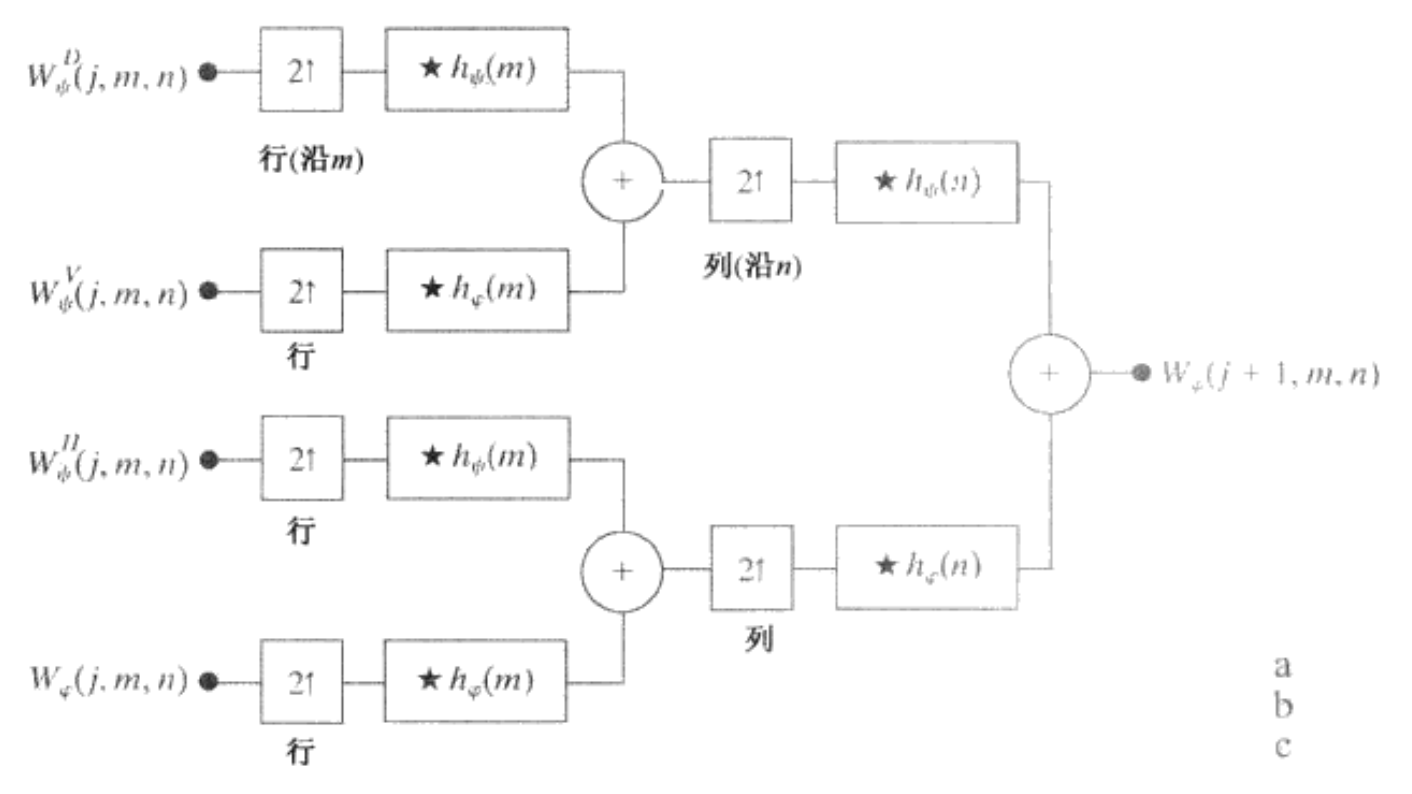
同理可以得到
小波分解过程如图所示
小波逆变换过程如图所示
其小波分解的结果如图所示








![[CVPR 2023:3D Gaussian Splatting:实时的神经场渲染]](https://img-blog.csdnimg.cn/direct/cdb3d156200147a8a2fa3b773a25d843.png)