我们已经知道步进电机就是一种将电脉冲信号转化为角位移的执行机构。那么如何精准地控制电机的速度和位置呢?这就需要一种驱动器的装置。
1.什么是步进驱动器?
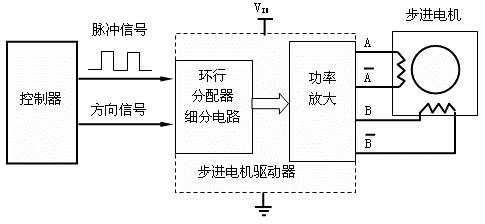
步进驱动器是一种能使步进电机运转的功率放大器,能把控制器发来的脉冲信号转化为驱动电流信号,从而控制步进电机的角位移,电机的转速与脉冲频率成正比,所以控制脉冲频率可以精确调速,控制脉冲数就可以精确定位。
2.有哪几种驱动模式?
有三种基本的步进电机驱动模式:整步、半步、细分。其主要区别在于电机线圈电流的控制精度(即激磁方式)。
(1)整步驱动:
步进电机驱动器按脉冲/方向指令对两相步进电机的两个线圈循环激磁(即将线圈充电设定电流),这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.80度 (标准两相电机的一圈共有200个步距角)。
(2)半步驱动:
在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。
如此循环地对两相线圈进行单相然后双相激磁步进电机将以每个脉冲0.90度的半步方式转动。
半步方式具有精度高一倍和低速运行时振动较小的优点。
(3)细分驱动:
细分驱动模式具有低速振动极小和定位精度高两大优点。对于有时需要低速运行(即电机转轴有时工作在60rpm以下)或定位精度要求小于0.90度的步进应用中,细分型步进电机驱动器获得广泛应用。
其基本原理是对电机的两个线圈分别按正弦和余弦形的台阶进行精密电流控制,从而使得一个步距角的距离分成若干个细分步完成。
细分下产生的精度控制效果,需要看驱动器对电流的控制能力,各家参差不齐,不能单看细分来确定电机精度。
3.驱动的方法有哪几种?其优缺点分别是什么?
(1)恒电压驱动
单电压进行驱动其实就是指在在步进电机进行绕组工作过程当中,仅仅只靠用一个方向的电压来对绕组进行供电,多个绕组进行交替互换进行提供电压。该种方式是一种比较古老的电机驱动方式,现在基本不用了。
优点:电路简单,元件少、控制也简单,实现起来的话比较之简单方便
缺点:必须提供足够大的电流的三极管来进行开关处理,步进电机的运转速度比较低速,电机震动比较大,发热大。由于目前已经不再继续使用,所以不多描述
(2)高低压驱动
由于恒电压驱动存在以上诸多缺点,技术的进一步发展,研发出新的高低压驱动来改善恒电压驱动的部分缺点,高低压驱动的原理是,在电机运动到整步的时候使用高压控制,在运动到半步的时候使用低压控制,停止时也是使用低压来控制。
优点:高低压控制在一定程度上改善了震动和噪音,第一次提出细分控制步进电机的概念,同时也提出了停止时电流减半的工作模式。
缺点:电路相对恒电压驱动复杂,对三极管高频特性要求提高,电机低速仍然震动比较大,发热仍然比较大,现在基本上不使用这种驱动模式。
(3)自激式恒电流斩波驱动
自激式恒电流斩波驱动的工作原理是通过硬件设计当电流达到某个设定值的时候通过硬件将其电流关闭,然后转为另一个绕组通电,另一个绕组通电的电流到某个固定的电流的时候,又能通过硬件将其关闭,如此反复,推进步进电机运转。
优点:噪音大大减小,转速一定程度上提高了,性能比前两种有一定的提高。
缺点:对电路设计要求比较高,对电路抗干扰要求比较高,容易引起高频,烧坏驱动元件,对元件性能要求比较高。
(4)电流比较斩波驱动
(目前市场上主要采用的技术)
电流比较斩波驱动是把步进电机绕组电流值转化为一定比例的电压,与D/A转换器输出的预设值进行比较,比较结果来控制功率管的开关,从而达到控制绕组相电流的目的。
优点:使运动控制模拟正弦波的特点,大大提高性能,运动速度和噪音都比较小,可以使用比较高的细分,是当前流行的控制方法。
缺点:电路比较复杂,对电路中的干扰难以控制和理论要求相吻合,容易产生抖动,在控制形成正弦波的波峰和波谷,容易导致高频干扰,进而导致驱动元件发热或者由于频率过高而老化,这也是很多驱动器使用1年多的时候容易出现红灯保护的主要原因。
(5)潜进式驱动
这是一种全新的运动控制技术,该技术是在当前电流比较斩波驱动技术的前提下,克服其中的缺点而创新的一种全新的驱动方法。其核心技术是在电流比较斩波驱动的前提下增加了驱动元件发热和高频抑制保护技术。
优点:兼有电流比较斩波驱动的优点外,发热特别小,使用寿命较长。
缺点:全新技术,价格比较高,目前每种步进电机和驱动器匹配要求相对比较严格
以上即是今天分享的全部内容,如果您有其他问题,请及时联系我们。
˜ 本文章全部内容或部分内容禁止擅自转载、拷贝。

![[CVPR 2023:3D Gaussian Splatting:实时的神经场渲染]](https://img-blog.csdnimg.cn/direct/cdb3d156200147a8a2fa3b773a25d843.png)