
一、基础知识
本篇我们使用 BOOT 按键来学习一下 GPIO 功能,首先补充一下相关术语介绍。
1、GPIO(General Purpose Input/Output)
- GPIO 是微控制器上的通用引脚,既可以作为输入(读取外部信号),也可以作为输出(控制外部设备)。
- 在 ESP32 中,GPIO 引脚可以灵活配置,用于多种用途,例如读取传感器数据、控制 LED、驱动电机等。
2、输入(Input)
- 当 GPIO 配置为输入时,它可以读取外部信号的状态(高电平或低电平)。
- 例如,读取按键是否被按下(按键按下时,引脚电平会发生变化)。
3、输出(Output)
- 当 GPIO 配置为输出时,它可以控制外部设备的状态(例如点亮 LED 或驱动继电器)。
- 例如,将 GPIO 设置为高电平(3.3V)来点亮 LED,或设置为低电平(0V)来关闭 LED。
4、内部上拉(Pull-up)和下拉(Pull-down)
- 上拉电阻:将 GPIO 引脚通过内部电阻连接到电源(3.3V),使引脚在未连接外部信号时保持高电平。
- 下拉电阻:将 GPIO 引脚通过内部电阻连接到地(GND),使引脚在未连接外部信号时保持低电平。
- 这些电阻可以确保 GPIO 引脚在没有外部信号时处于确定的状态,避免悬空(floating)导致的不稳定。
5、中断引脚(Interrupt Pin)
- 中断是一种硬件机制,当 GPIO 引脚的状态发生变化时(例如从高电平变为低电平),会触发一个中断信号。
- 中断可以让微控制器立即响应外部事件,而不需要不断轮询(polling)引脚状态。
- 例如,当按键按下时,GPIO 引脚的电平变化会触发中断,微控制器可以立即执行相应的处理程序。
6、BOOT 按键和 IO0 引脚
- BOOT 按键:ESP32 开发板上通常有一个 BOOT 按键,用于进入下载模式或复位。
- IO0 引脚:这是 ESP32 的一个 GPIO 引脚,编号为 GPIO0。它通常与 BOOT 按键连接。
- 当 BOOT 按键按下时,IO0 引脚的电平会发生变化(例如从高电平变为低电平)。
7、设置为 GPIO 中断,接收按键请求
- 将 IO0 引脚配置为中断引脚,用于检测 BOOT 按键的按下事件。
- 当按键按下时,IO0 引脚的电平变化会触发中断,微控制器可以立即执行相应的代码(例如处理按键请求)。
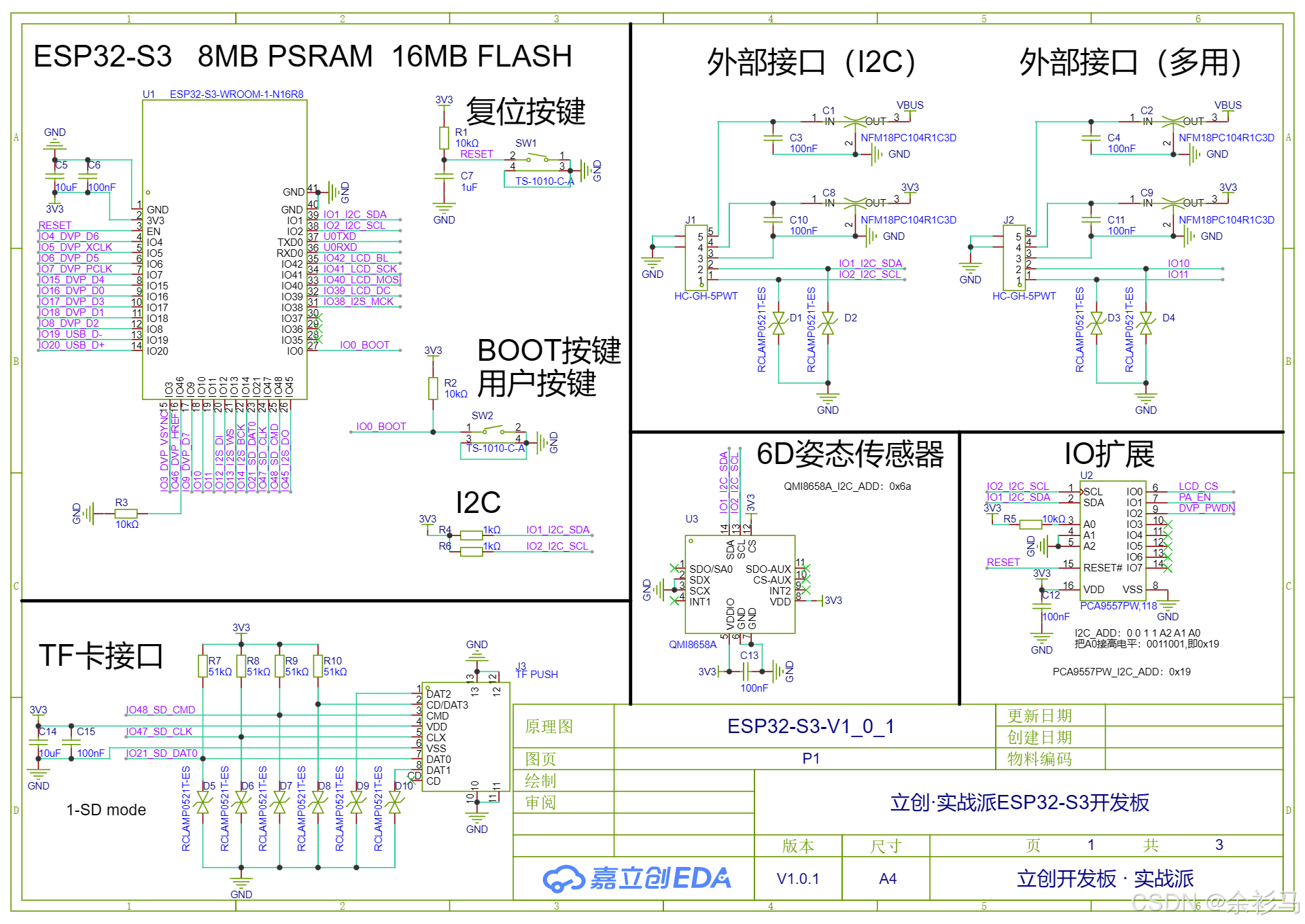
二、设计图
更多详细资料请查询官网 立创·实战派ESP32-S3开发板 - 立创开源硬件平台
三、实战操作
1、Copy 示例工程 sample_project
示例工程路径:$HOME/esp/esp-idf/tools/templates/sample_project
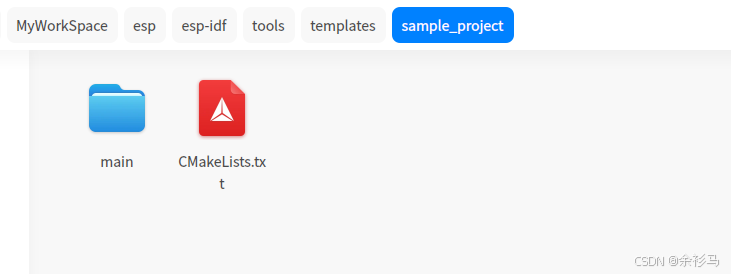
直接在 esp-idf 目录下搜索 sample_project 也可以找到,接着复制一份工程代码到自己的编码路径,然后修改文件夹名字为 boot_key。
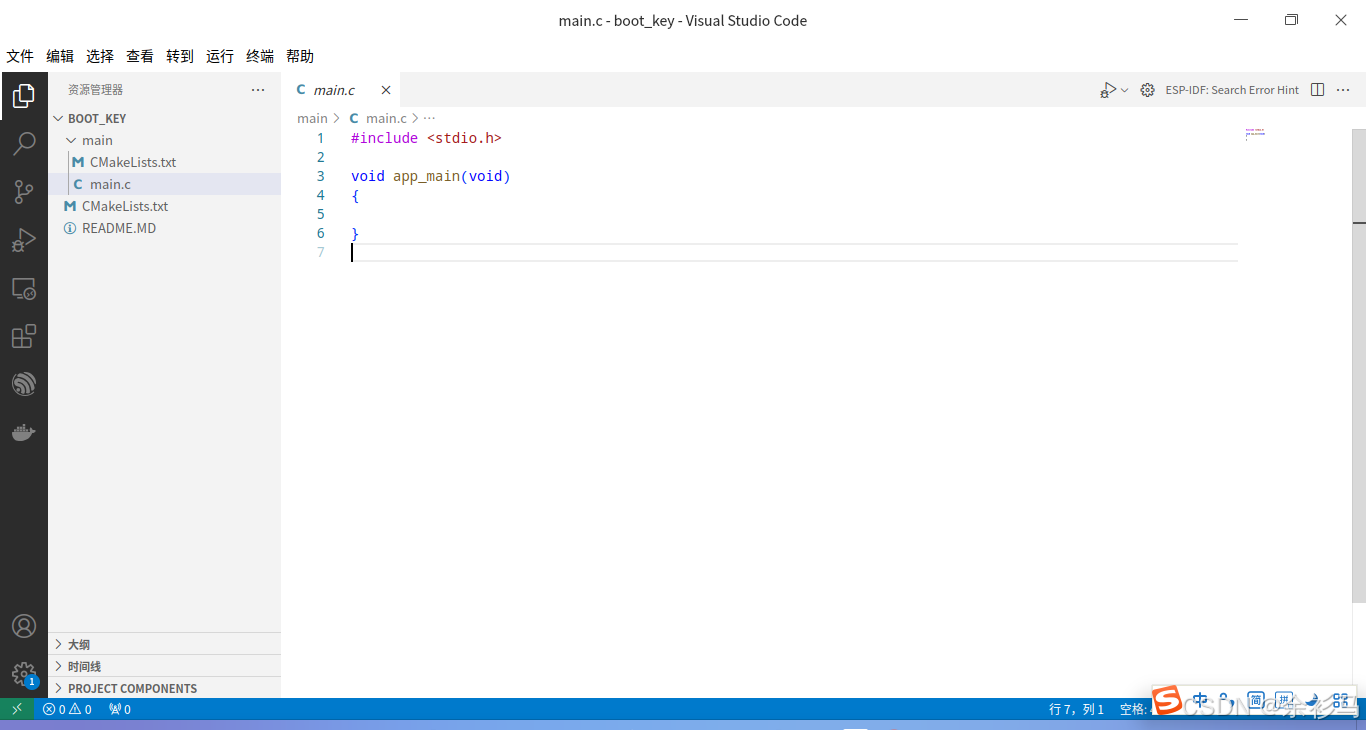
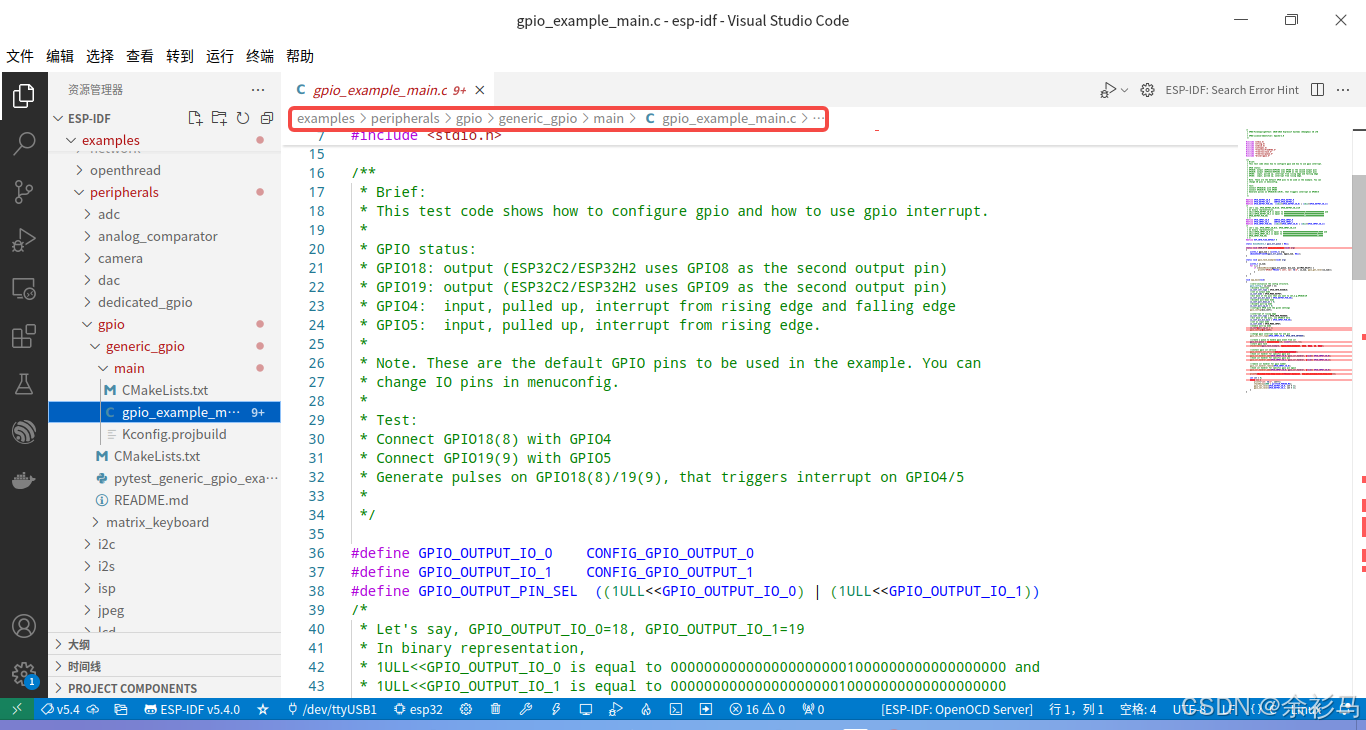
可以看到模板工程下只有一个空函数 app_main,函数体还没有代码,我们需要参考官方提供的 gpio 示例进行编码,路径在:$HOME/esp/esp-idf/examples/peripherals/gpio/generic_gpio
2、引入头文件
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <inttypes.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/queue.h"
#include "driver/gpio.h"// ...使用 printf 函数,需要添加 stdio.h 头文件。string.h 和 stdlib.h 我们这里用不着,可以去掉。接下来是 3 个 freeRTOS 的头文件,最后一个头文件是用于 gpio 的配置。
3、gpio 配置
3.1、官方示例
首先看一下官方源码示例是怎么写的,再来看看我们需要修改哪些地方,代码注释如下:
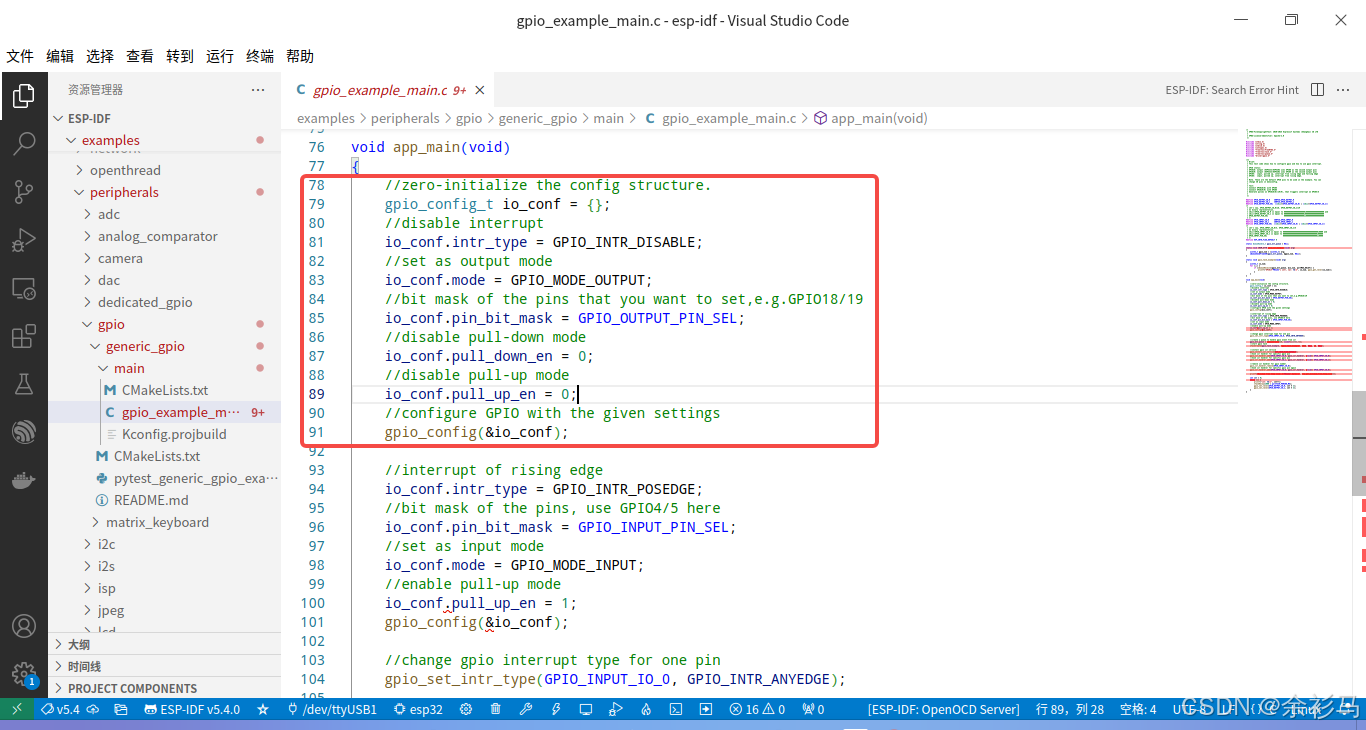
// 官方示例代码
void app_main(void)
{// Step1、定义了一个 gpio_config_t 结构体变量。gpio_config_t io_conf = {};// Step2、定义引脚中断类型,这里是 GPIO_INTR_DISABLE,表示中断关闭io_conf.intr_type = GPIO_INTR_DISABLE;// Step3、配置模式,这里是 GPIO_MODE_OUTPUT 表示输出模式io_conf.mode = GPIO_MODE_OUTPUT;// Step4、配置引脚io_conf.pin_bit_mask = GPIO_OUTPUT_PIN_SEL;// Step5、配置是否打开下拉电阻io_conf.pull_down_en = 0;// Step6、配置是否打开上拉电阻io_conf.pull_up_en = 0;// Step7、使用 gpio_config 函数进行配置gpio_config(&io_conf);
}3.2、对应改动点说明
改动点1、修改引脚中断类型
//falling edge interrupt
io_conf.intr_type = GPIO_INTR_NEGEDGE;开发板上的按键没有按下的时候是高电平,按下去以后是低电平,因此定义成下降沿中断。这里原来是 GPIO_INTR_DISABLE,表示中断关闭,这里我们修改为 GPIO_INTR_NEGEDGE,即下降沿中断。这些宏定义在 gpio_types.h 文件中被定义,我们在 gpio_example_main.c 文件中的 GPIO_INTR_DISABLE 上单击右键,然后选择“转到定义”,就可以找到这几个宏定义,如下所示:
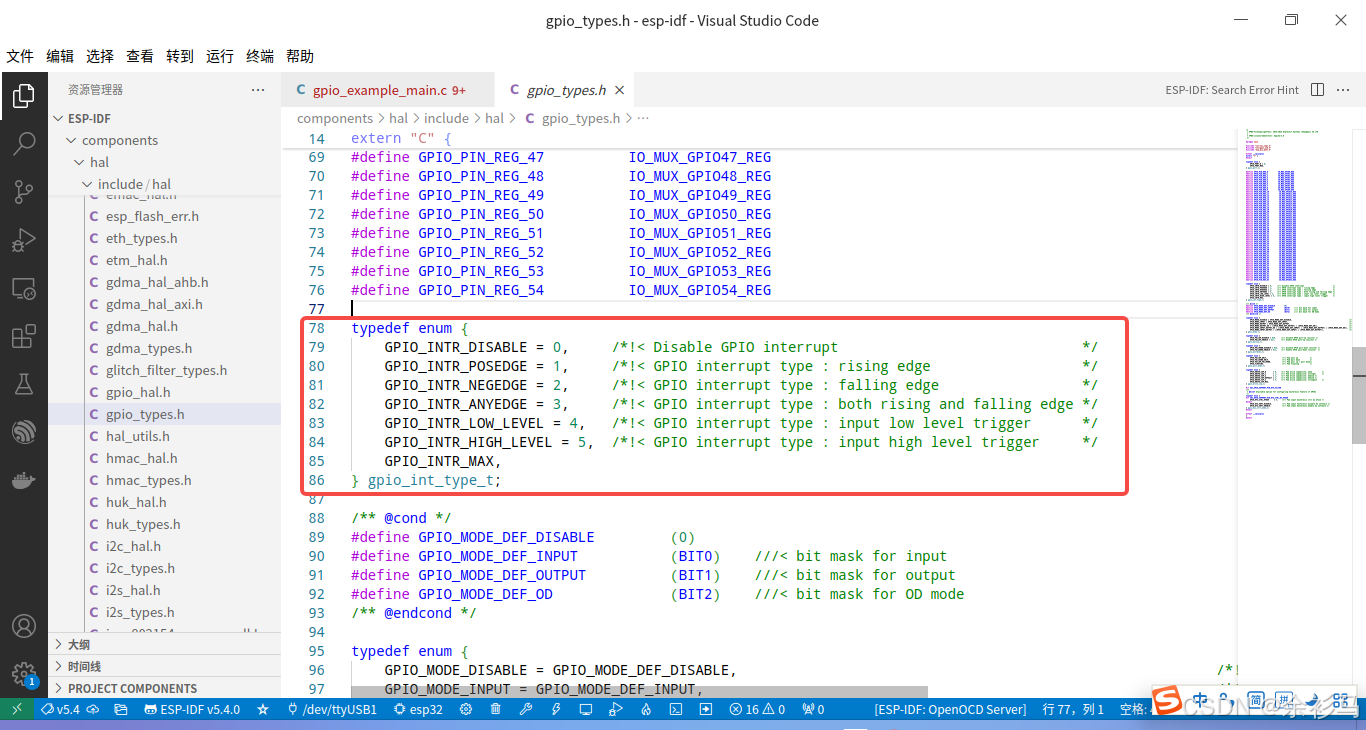
typedef enum {GPIO_INTR_DISABLE = 0, /*!< Disable GPIO interrupt */GPIO_INTR_POSEDGE = 1, /*!< GPIO interrupt type : rising edge */GPIO_INTR_NEGEDGE = 2, /*!< GPIO interrupt type : falling edge */GPIO_INTR_ANYEDGE = 3, /*!< GPIO interrupt type : both rising and falling edge */GPIO_INTR_LOW_LEVEL = 4, /*!< GPIO interrupt type : input low level trigger */GPIO_INTR_HIGH_LEVEL = 5, /*!< GPIO interrupt type : input high level trigger */GPIO_INTR_MAX,
} gpio_int_type_t;改动点2、修改 gpio 模式
//set as input mode
io_conf.mode = GPIO_MODE_INPUT;修改为输入模式,就可以读取外部信号的状态,按键按下时,捕获到引脚电平变化信号。
改动点3、修改引脚
//bit mask of the pins GPIO0
io_conf.pin_bit_mask = 1<<GPIO_NUM_0;因为 BOOT 按键连接到了 GPIO0,所以这里我们把原来的 GPIO_OUTPUT_PIN_SEL 修改为 1<<GPIO_NUM_0,实际上 GPIO_NUM_0 是一个宏定义,值为 0。
改动点4、修改打开上下拉电阻
//disable pull-down mode
io_conf.pull_down_en = 0;
//enable pull-up mode
io_conf.pull_up_en = 1;打开上拉电阻,将 GPIO 引脚通过内部电阻连接到电源,使引脚在未连接外部信号时保持高电平,从而避免引脚悬空导致的不稳定问题。
补充:为什么不用下拉电阻?
下拉电阻也可以用于避免引脚悬空,但它会将引脚在没有外部信号时拉低到地(0V)。在按键检测中,通常使用上拉电阻,因为按键按下时会将引脚拉低到地,这种设计更符合直觉和常见的硬件电路设计。
3.3、改动代码整合
改动后的代码可以简化成这样子,
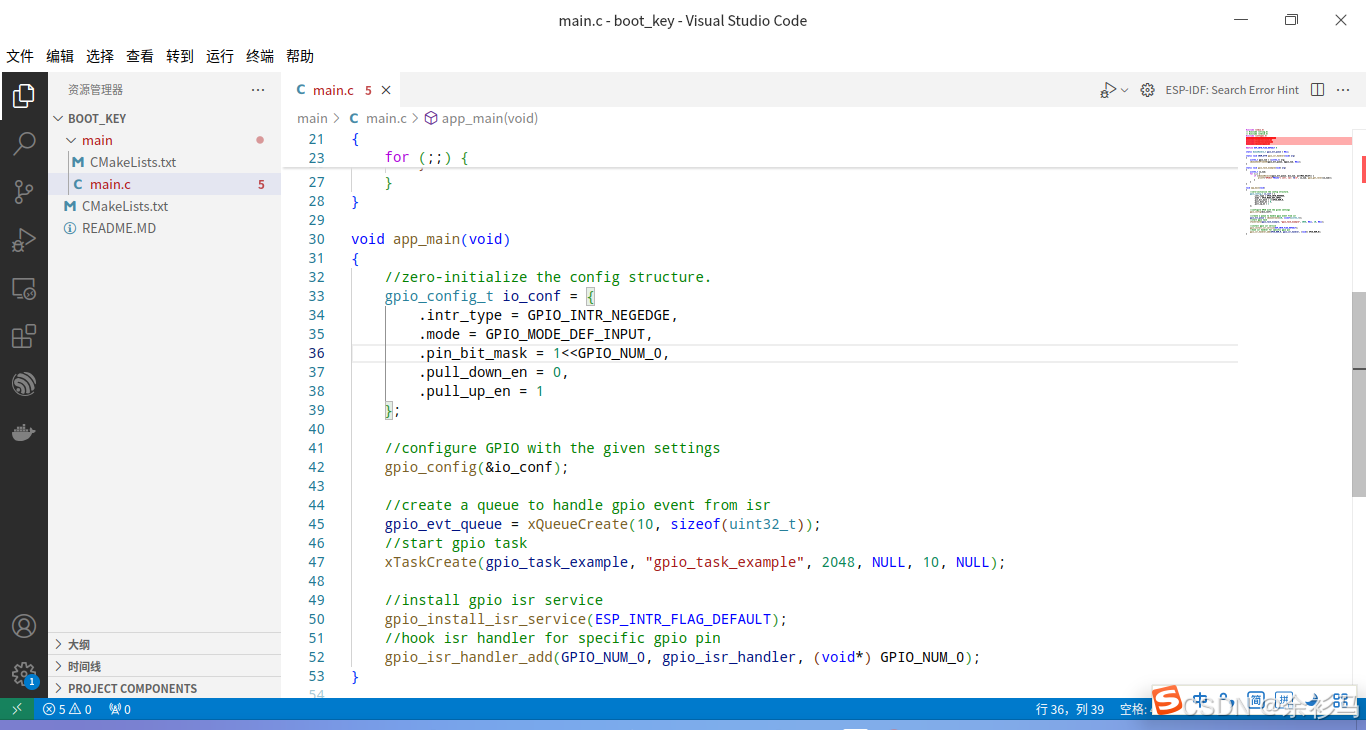
// ...void app_main(void)
{//zero-initialize the config structure.gpio_config_t io_conf = {.intr_type = GPIO_INTR_NEGEDGE,.mode = GPIO_MODE_DEF_INPUT,.pin_bit_mask = 1<<GPIO_NUM_0,.pull_down_en = 0,.pull_up_en = 1};//configure GPIO with the given settingsgpio_config(&io_conf);}4、中断服务函数
4.1、官方示例
同样的,首先看一下官方源码示例是怎么写的,再来看看我们需要修改哪些地方,代码注释如下:
// 官方示例代码#define ESP_INTR_FLAG_DEFAULT 0static QueueHandle_t gpio_evt_queue = NULL;static void IRAM_ATTR gpio_isr_handler(void* arg)
{uint32_t gpio_num = (uint32_t) arg;xQueueSendFromISR(gpio_evt_queue, &gpio_num, NULL);
}static void gpio_task_example(void* arg)
{uint32_t io_num;for (;;) {if (xQueueReceive(gpio_evt_queue, &io_num, portMAX_DELAY)) {printf("GPIO[%"PRIu32"] intr, val: %d\n", io_num, gpio_get_level(io_num));}}
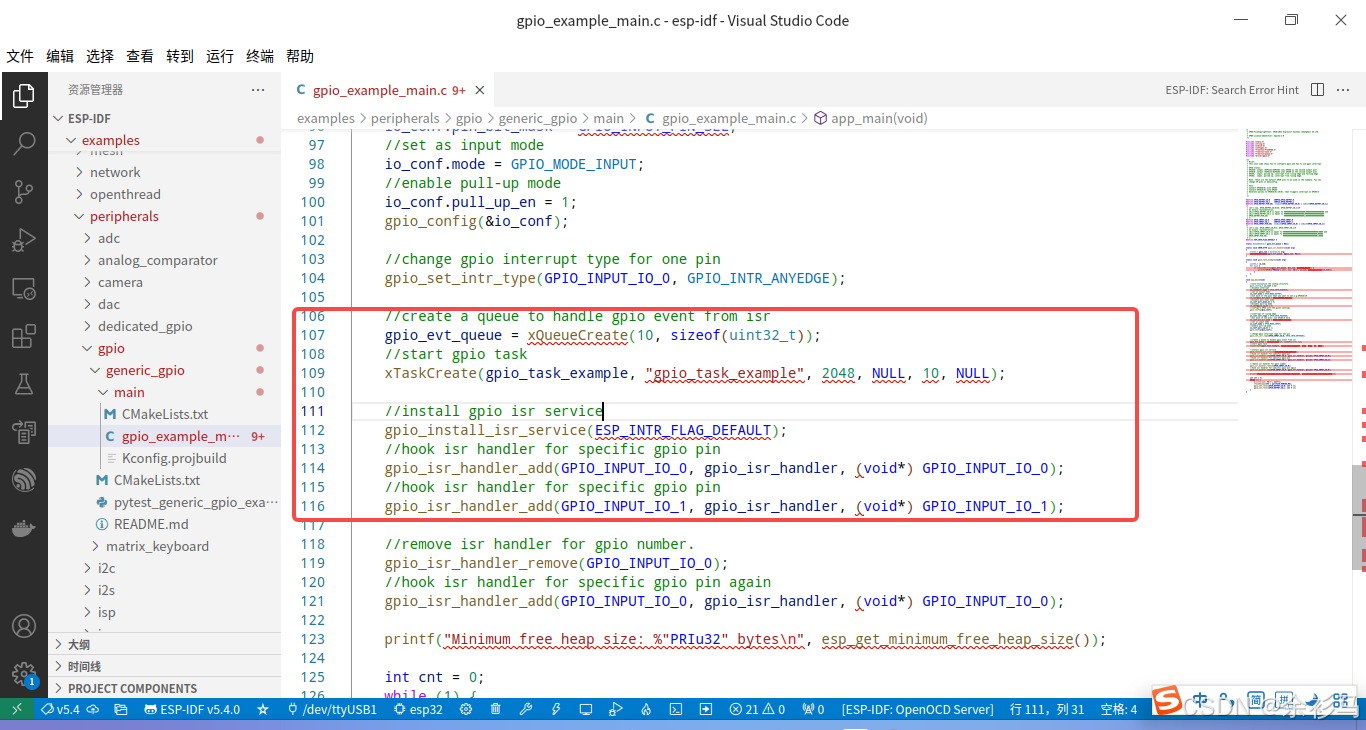
}void app_main(void)
{// ...// Step1、创建了一个队列,队列消息数量为 10,gpio_evt_queue 是队列句柄gpio_evt_queue = xQueueCreate(10, sizeof(uint32_t));// Step2、创建了一个任务,任务名称为 gpio_task_examplexTaskCreate(gpio_task_example, "gpio_task_example", 2048, NULL, 10, NULL);// Step3、启动 GPIO 中断服务,其中 ESP_INTR_FLAG_DEFAULT 的值是 0gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT);// Step4、添加某个 GPIO 的中断,第 1 个参数指定哪个 GPIO 产生中断,第 2 个参数是中断服务函数的名称,第 3 个参数是中断服务函数的参数gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0);// ...
}4.2、对应改动点说明
gpio_isr_handler_add(GPIO_NUM_0, gpio_isr_handler, (void*) GPIO_NUM_0);这里我们只需要添加 GPIO0 的中断,因此修改了参数1、参数3。
4.3、改动代码整合
// ...void app_main(void)
{// ...//create a queue to handle gpio event from isrgpio_evt_queue = xQueueCreate(10, sizeof(uint32_t));//start gpio taskxTaskCreate(gpio_task_example, "gpio_task_example", 2048, NULL, 10, NULL);//install gpio isr servicegpio_install_isr_service(ESP_INTR_FLAG_DEFAULT);//hook isr handler for specific gpio pingpio_isr_handler_add(GPIO_NUM_0, gpio_isr_handler, (void*) GPIO_NUM_0);
}5、完整代码
#include <stdio.h>
// #include <string.h>
// #include <stdlib.h>
#include <inttypes.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/queue.h"
#include "driver/gpio.h"#define ESP_INTR_FLAG_DEFAULT 0static QueueHandle_t gpio_evt_queue = NULL;static void IRAM_ATTR gpio_isr_handler(void* arg)
{uint32_t gpio_num = (uint32_t) arg;xQueueSendFromISR(gpio_evt_queue, &gpio_num, NULL);
}static void gpio_task_example(void* arg)
{uint32_t io_num;for (;;) {if (xQueueReceive(gpio_evt_queue, &io_num, portMAX_DELAY)) {printf("GPIO[%"PRIu32"] intr, val: %d\n", io_num, gpio_get_level(io_num));}}
}void app_main(void)
{//zero-initialize the config structure.gpio_config_t io_conf = {.intr_type = GPIO_INTR_NEGEDGE,.mode = GPIO_MODE_DEF_INPUT,.pin_bit_mask = 1<<GPIO_NUM_0,.pull_down_en = 0,.pull_up_en = 1};//configure GPIO with the given settingsgpio_config(&io_conf);//create a queue to handle gpio event from isrgpio_evt_queue = xQueueCreate(10, sizeof(uint32_t));//start gpio taskxTaskCreate(gpio_task_example, "gpio_task_example", 2048, NULL, 10, NULL);//install gpio isr servicegpio_install_isr_service(ESP_INTR_FLAG_DEFAULT);//hook isr handler for specific gpio pingpio_isr_handler_add(GPIO_NUM_0, gpio_isr_handler, (void*) GPIO_NUM_0);
}
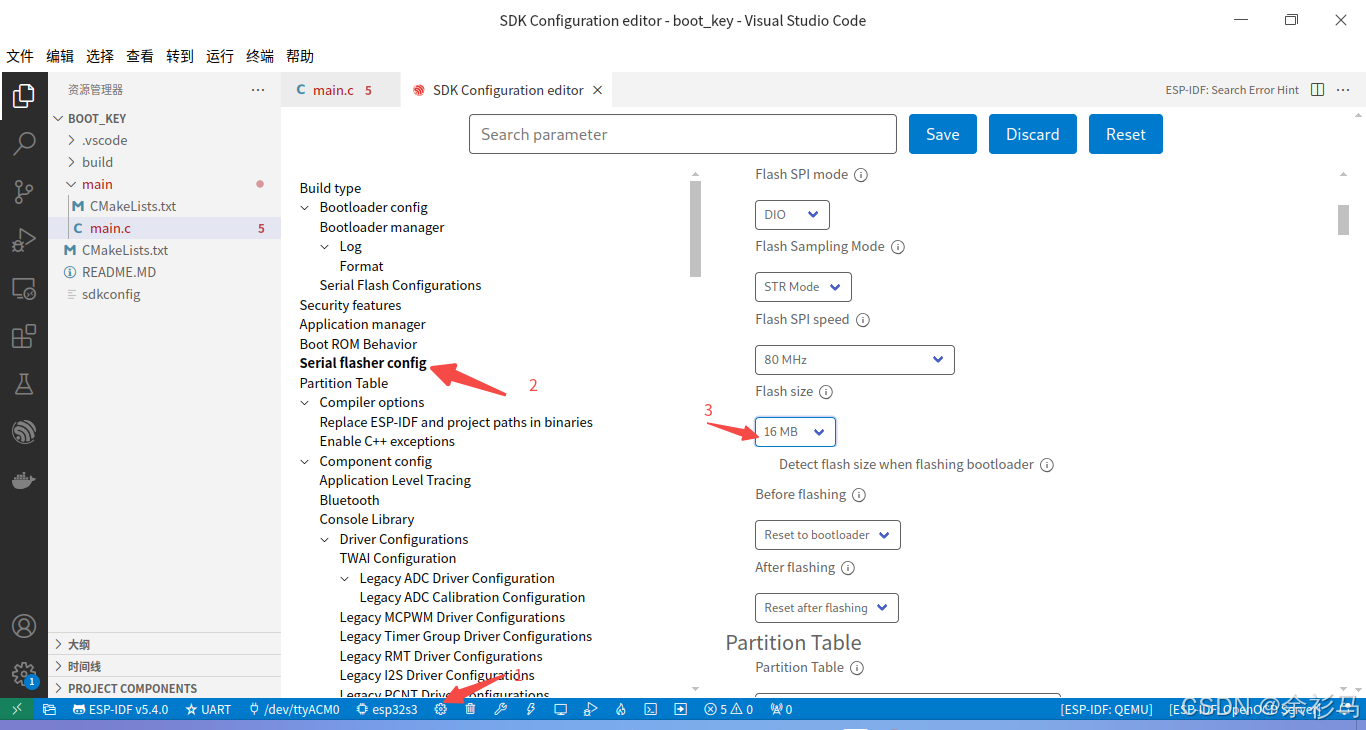
四、编译下载
配置 menu config,设置 flash size 为 16 MB,
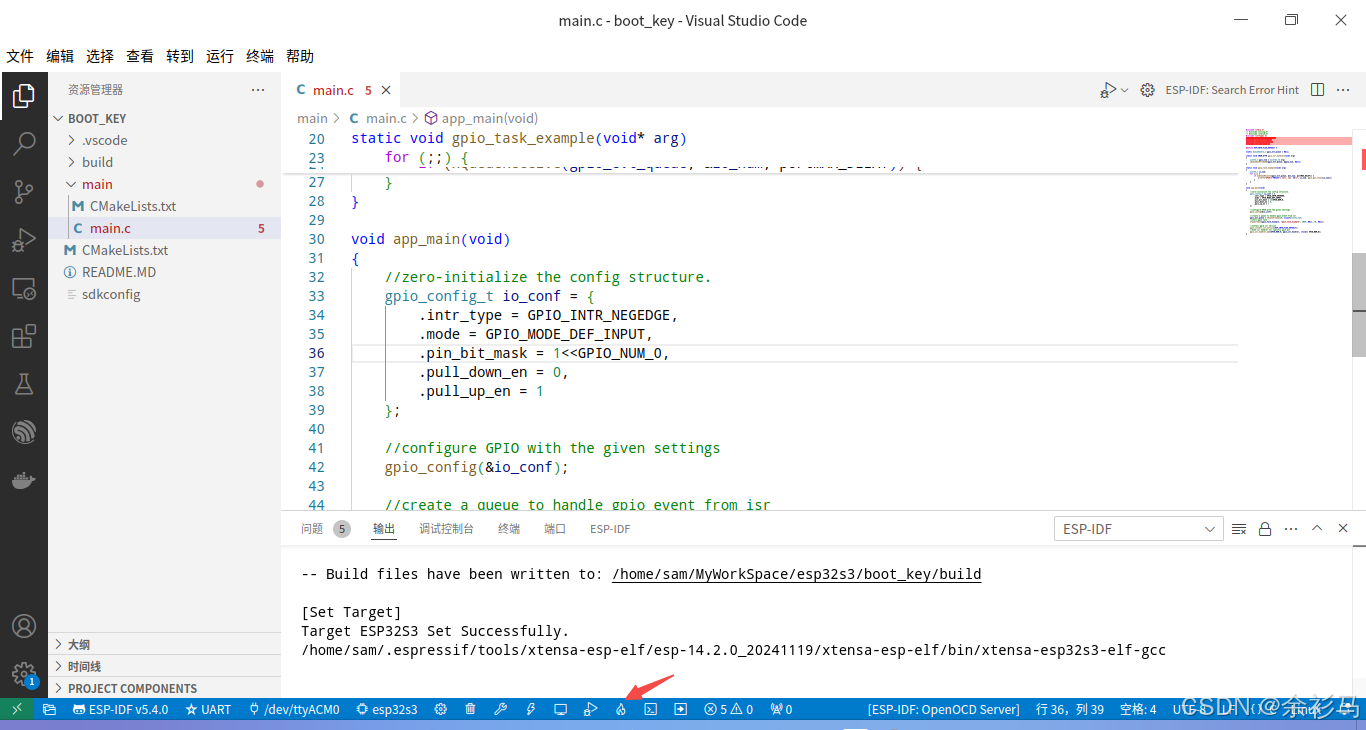
一键烧录,
boot 按键效果,
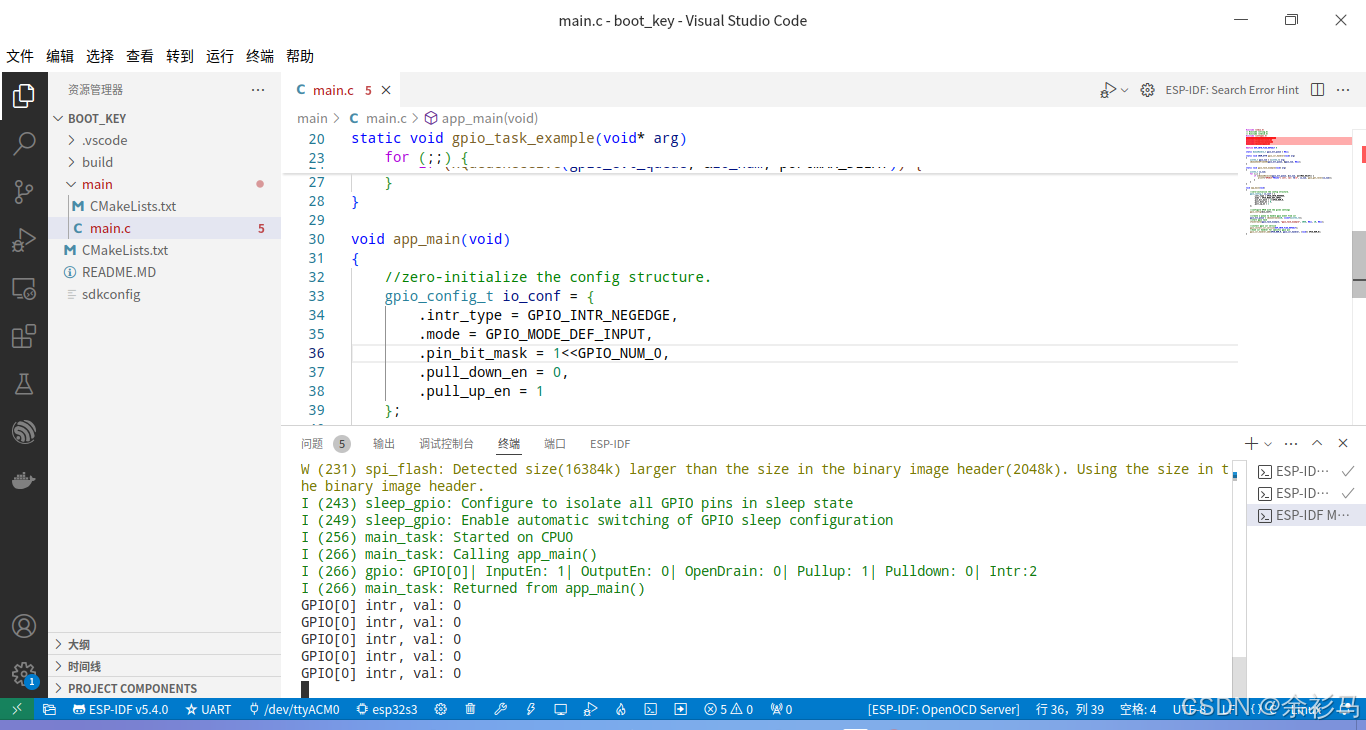
可以看到,当我们按下 boot 键的时候,控制台输出 GPIO[0] intr, val: 0 符合预期。
五、生成默认配置
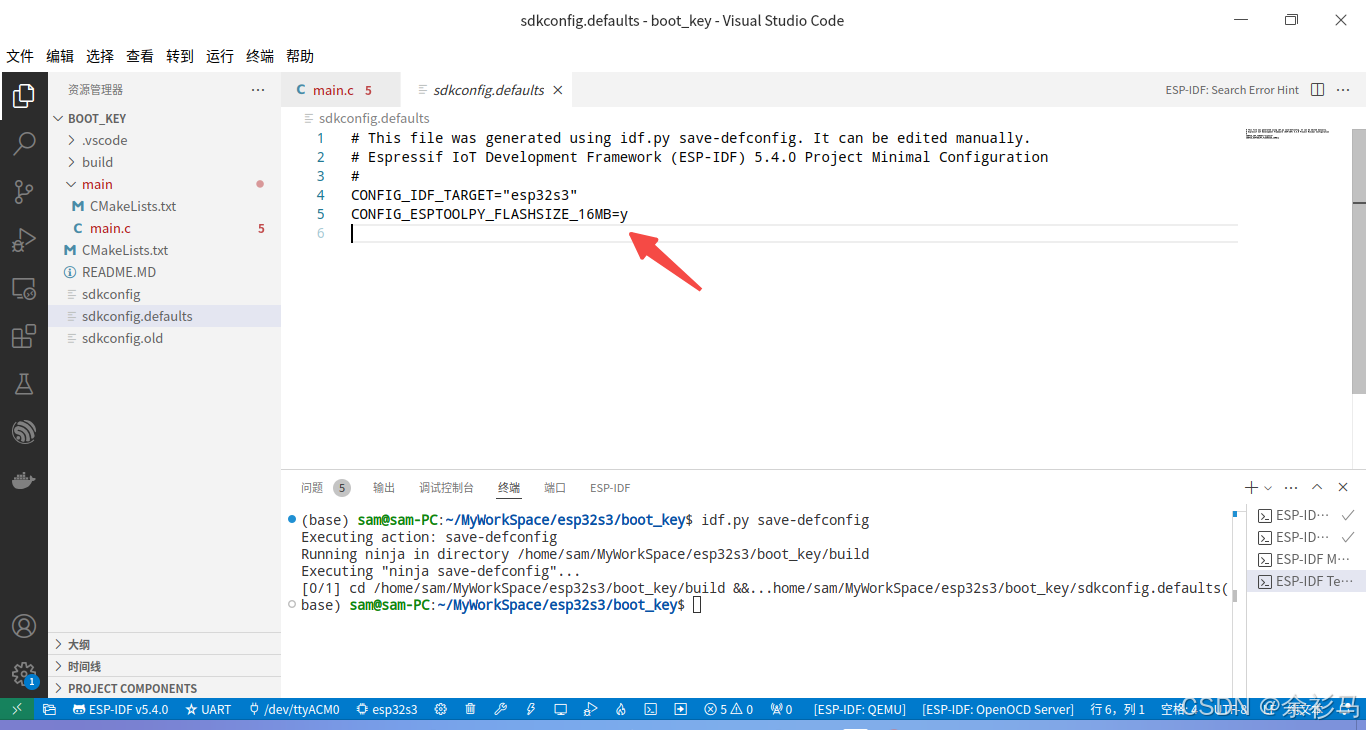
编译下载后,结果没有问题的话,使用 idf.py save-defconfig 命令生成 sdkconfig.defaults 文件。这个命令要打开“命令终端”执行,看结果的“串口终端”不行。
idf.py save-defconfig 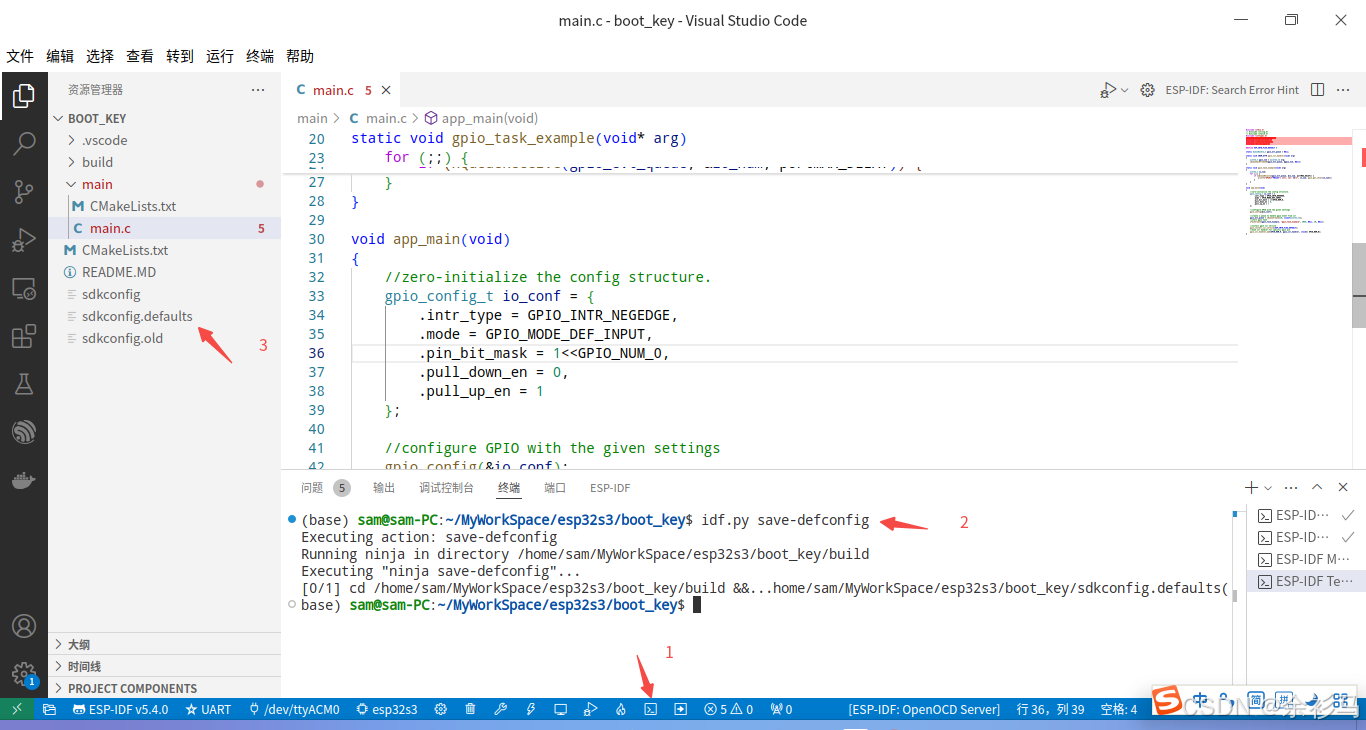
回车执行命令后,会看到工程中多了一个 sdkconfig.defaults 文件,点击打开 sdkconfig.defaults 文件,会看到里面的内容。这个文件里面包含了我们对 menuconfig 的修改。
这时候,我们可以把工程中配置和编译生成的文件夹全部去掉,最后的文件如下所示:
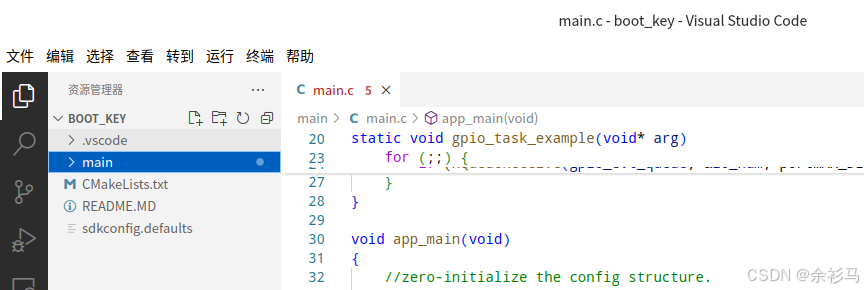
使用 VSCode 重新打开工程,在选择目标芯片后,sdkconfig.defaults 文件里面的配置就配置到 menuconfig 里面了,省去了手动配置 menucofig。如果 menuconfig 里面配置的内容很多,这个文件就显得很有必要了。



















