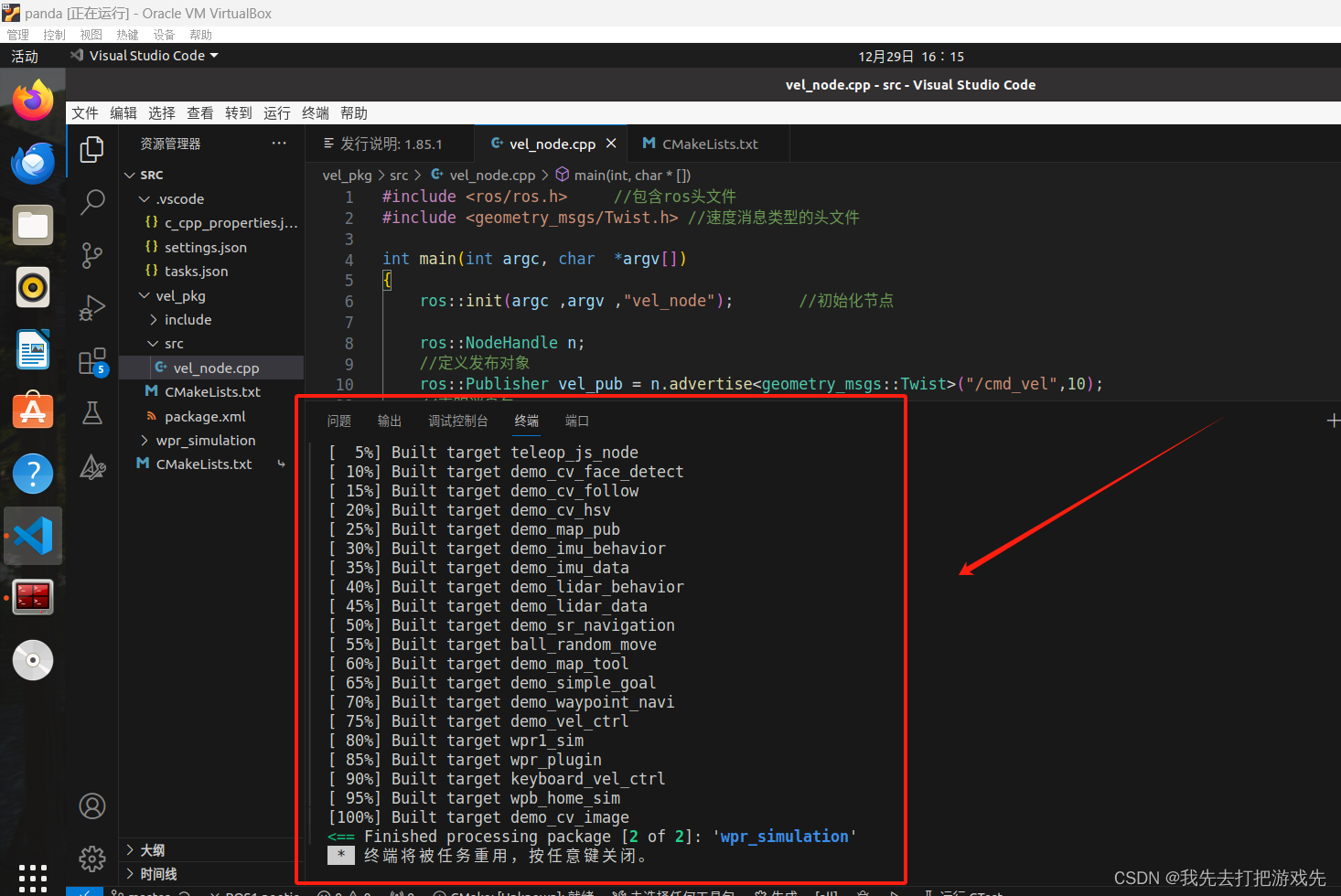
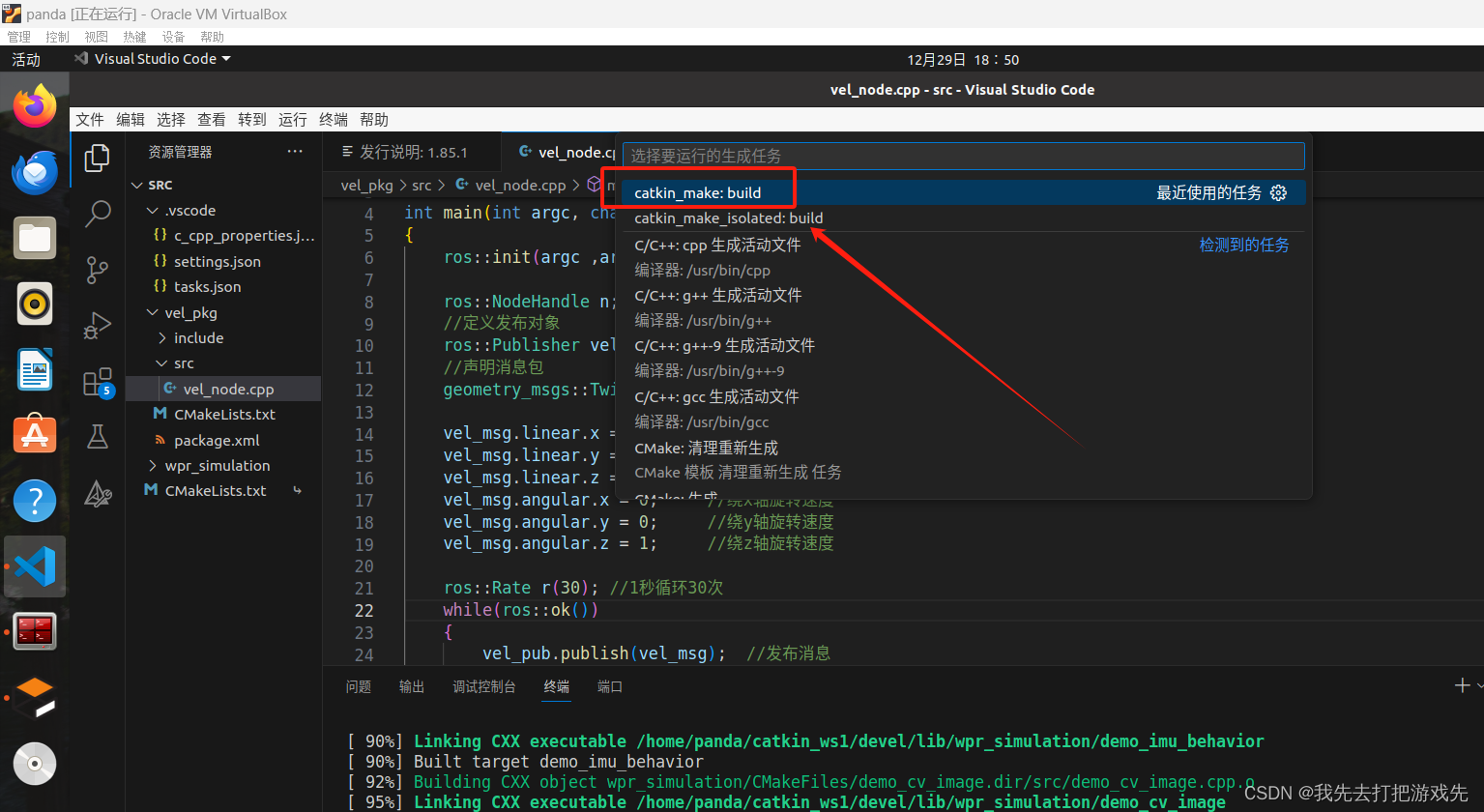
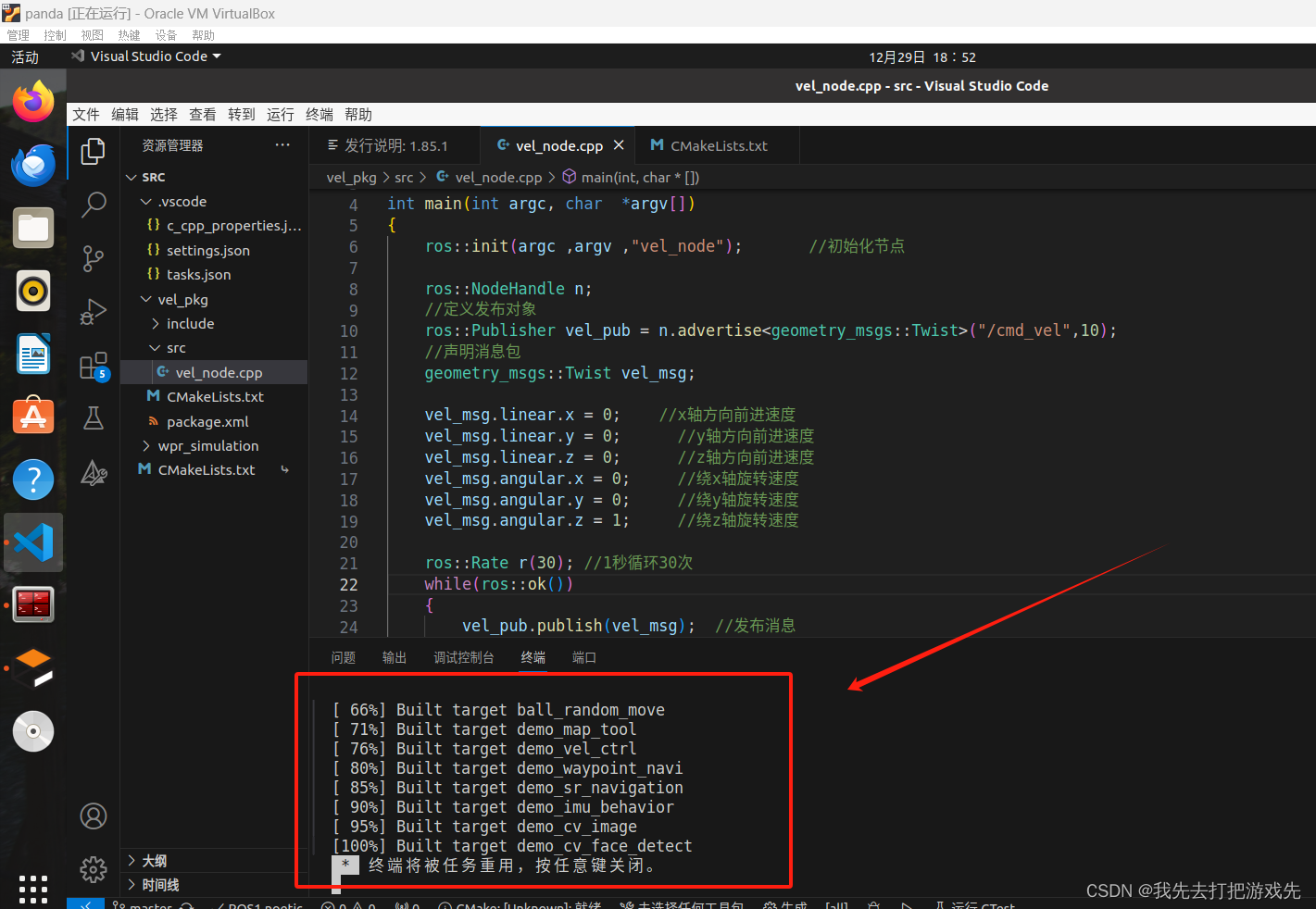
catkin_make 进行编译
source ./devel/setup.bash 后回车
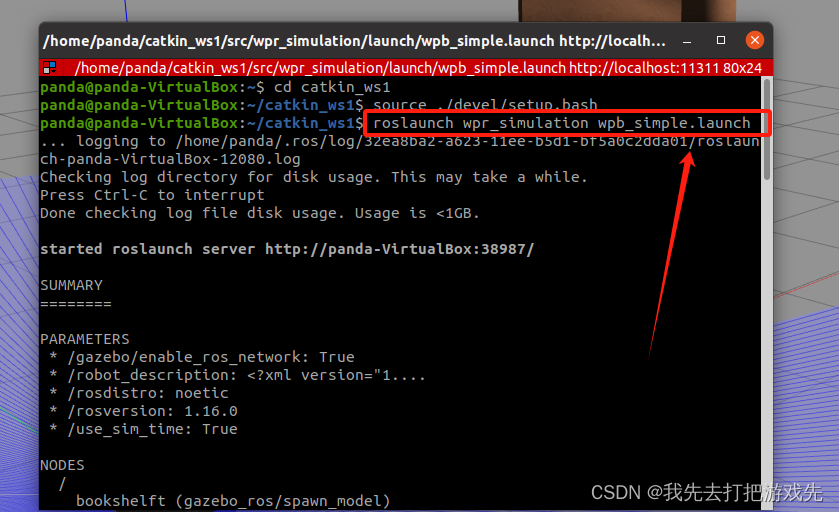
roslaunch wpr_simulation wpb_simple.launch 后回车
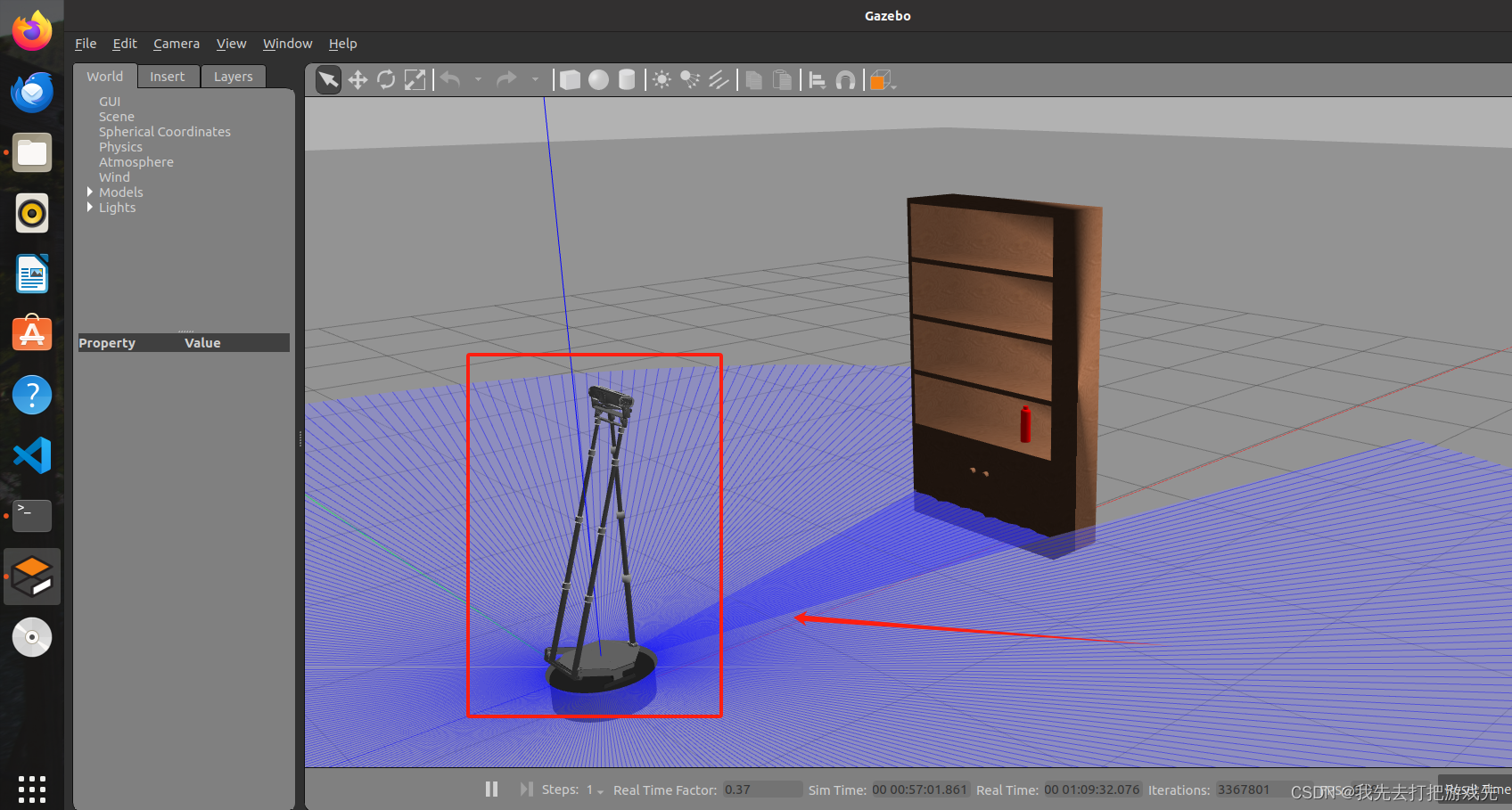
rosrun wpr_simulation demo_vel_ctrl 后回车,运行运动控制示例程序
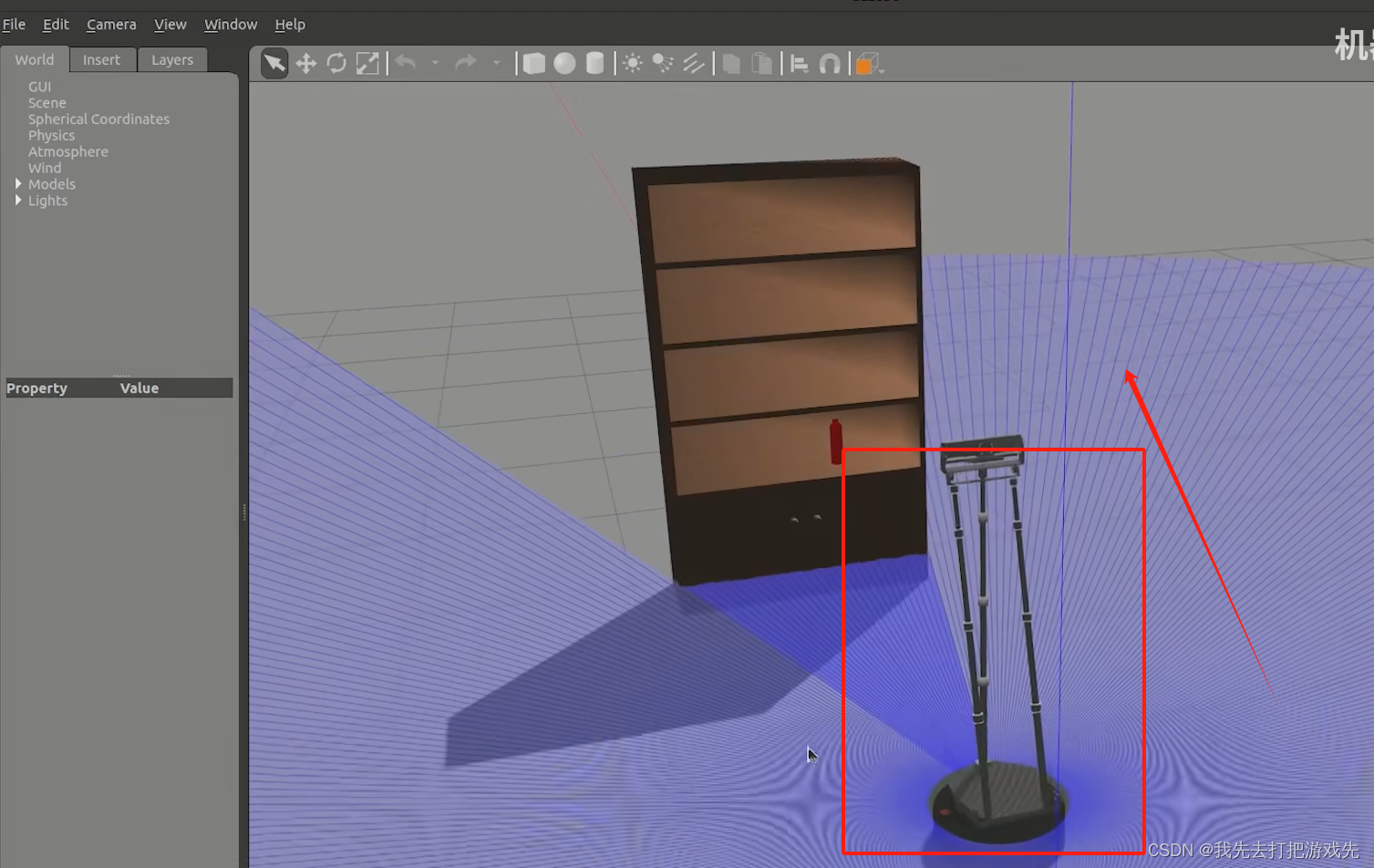
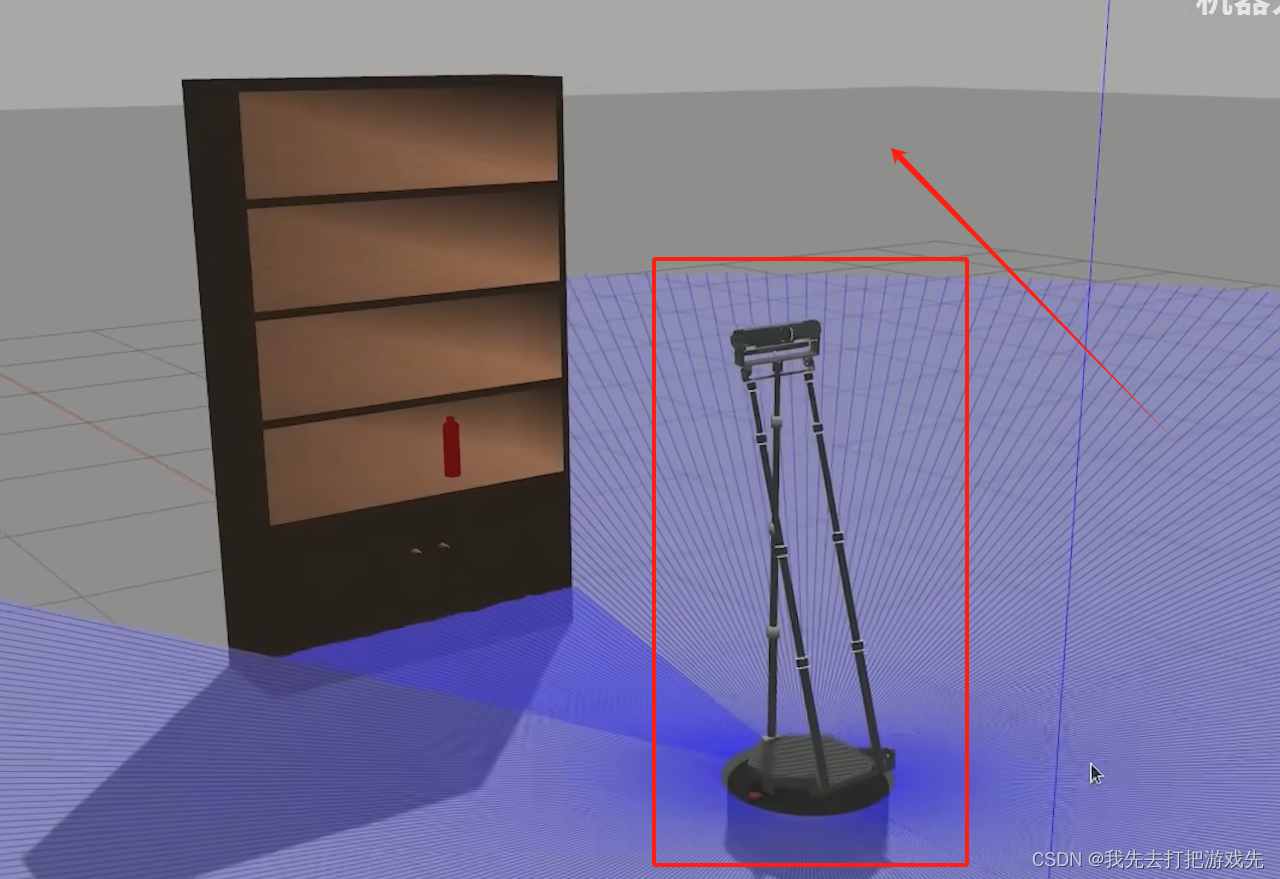
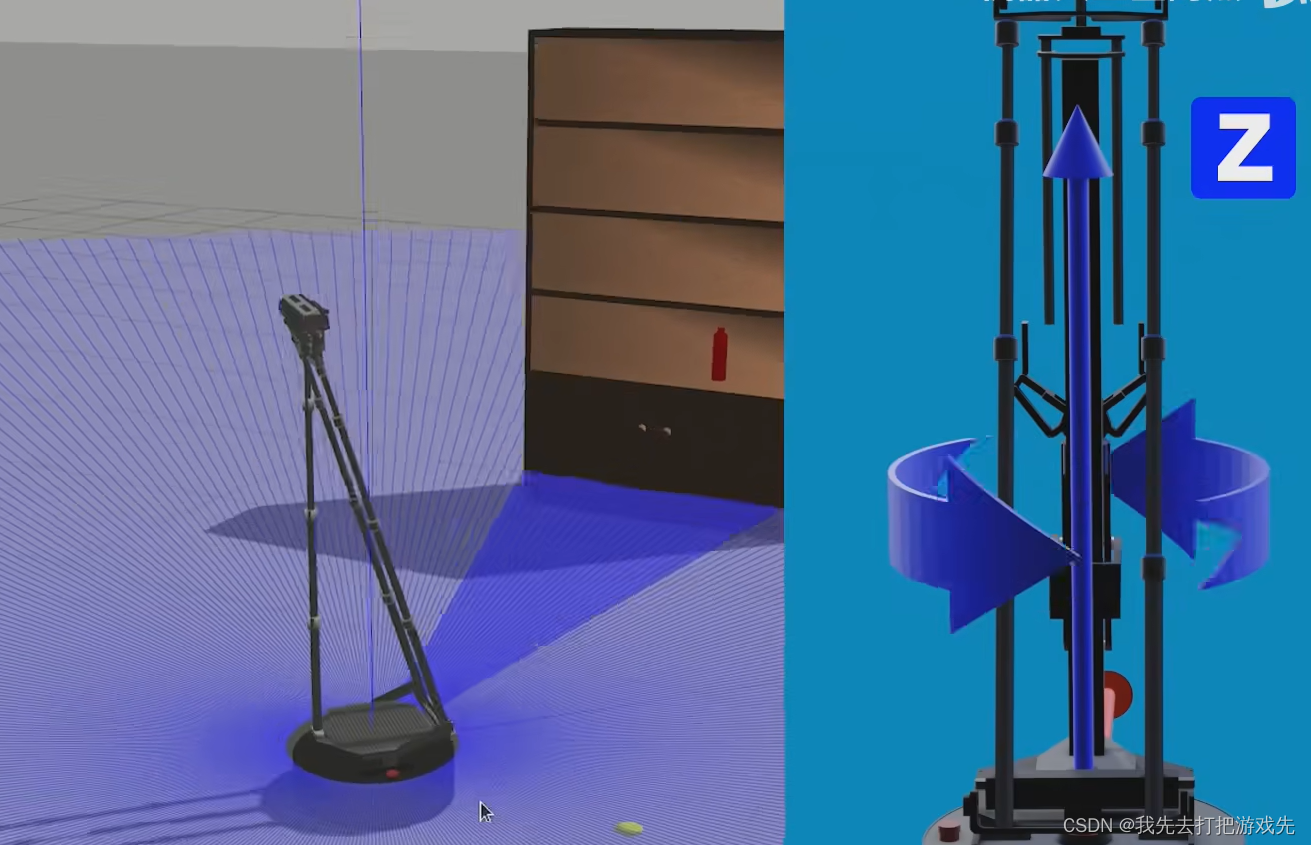
机器人在缓慢前进 ,这就是本文想要达到的控制效果 。
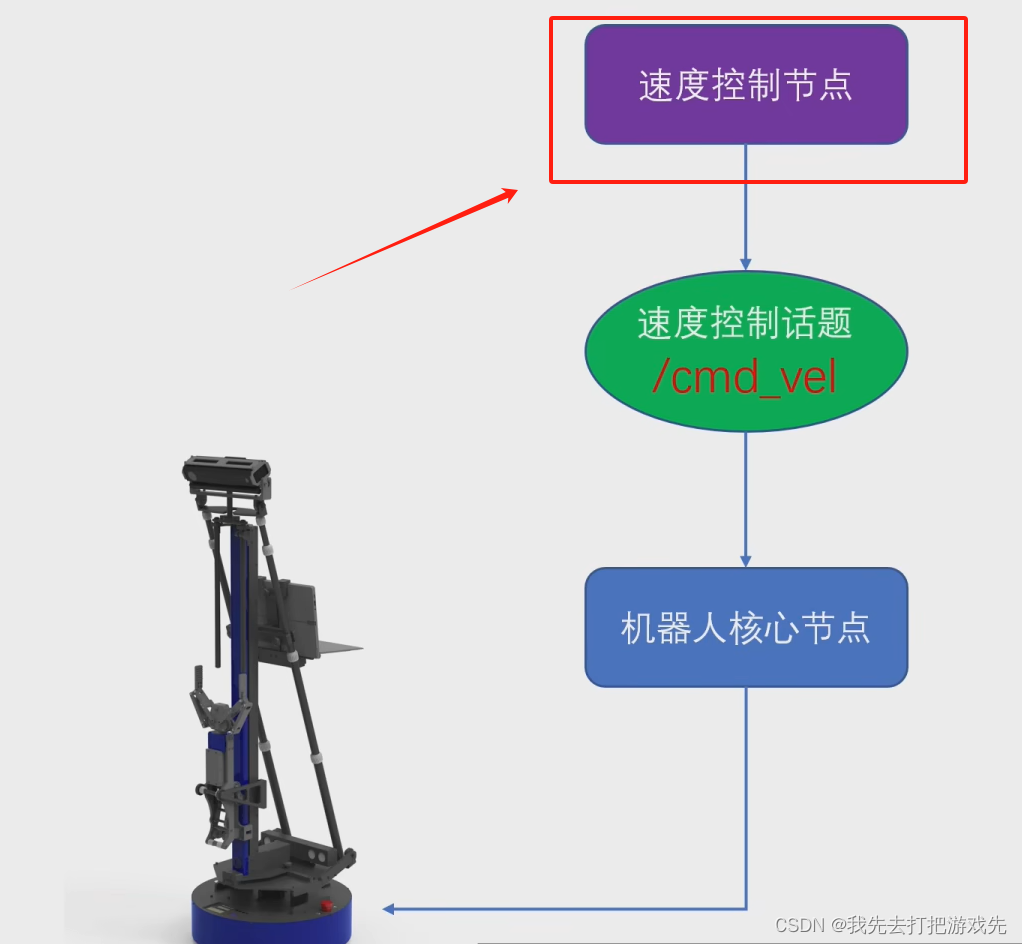
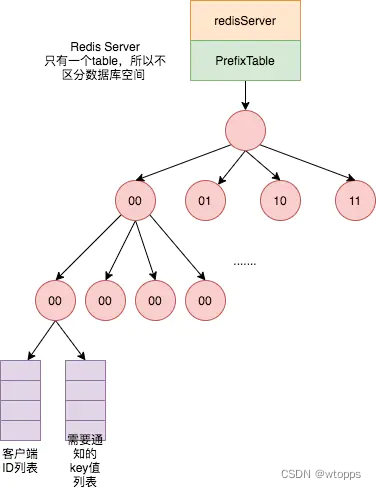
速度控制节点 ,将速度消息包 发送到速度控制话题/cmd_vel 中去,这就是个典型的发布者节点
cd ~/catkin_ws1/src 进入工作空间下的src目录
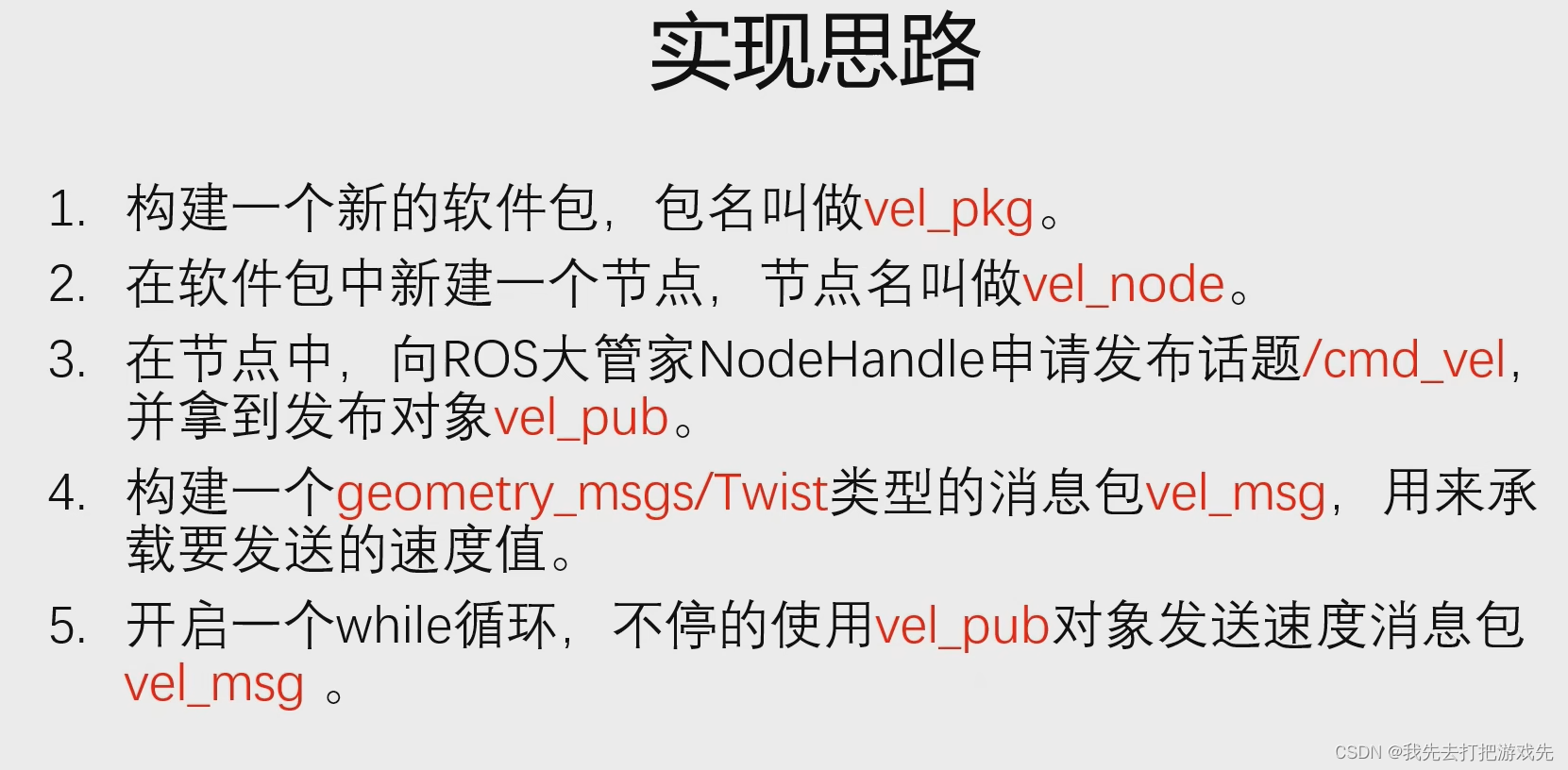
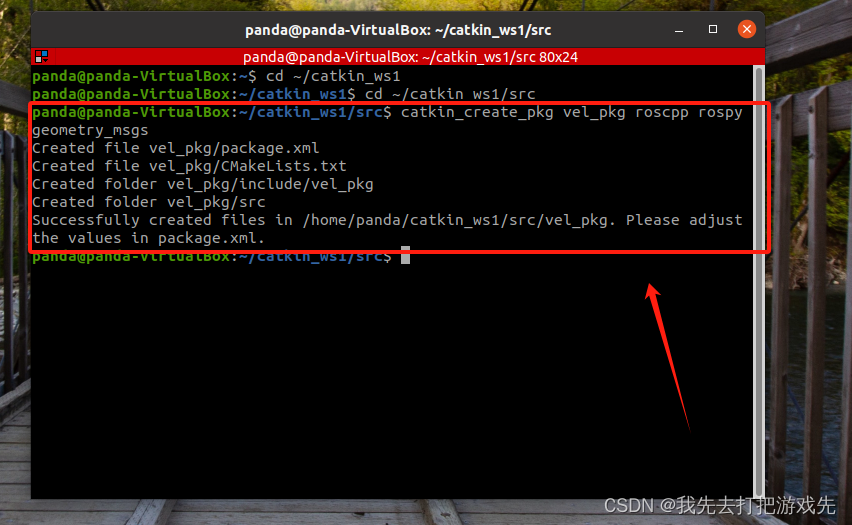
catkin_create_pkg vel_pkg roscpp rospy geometry_msgs ,创建软件包,名字是vel_pkg,依赖项是roscpp rospy和geometry_msgs,这个geometry_msgs就是包含了速度消息类型的软件包
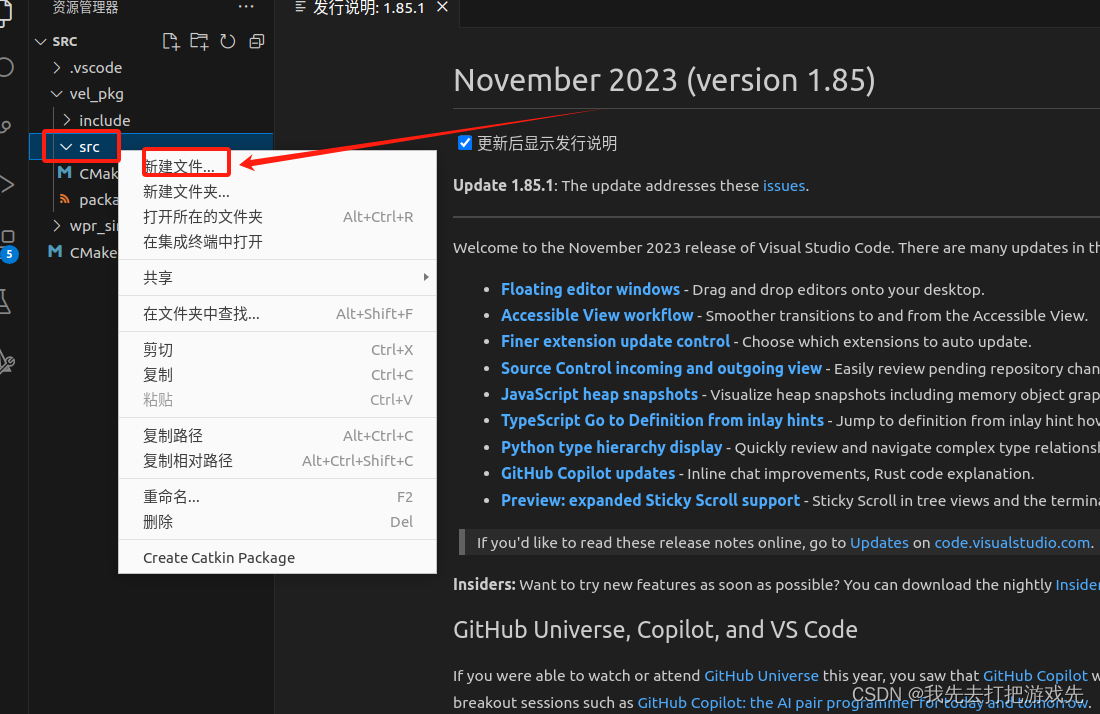
vel_node.cpp ,这是一个节点代码文件
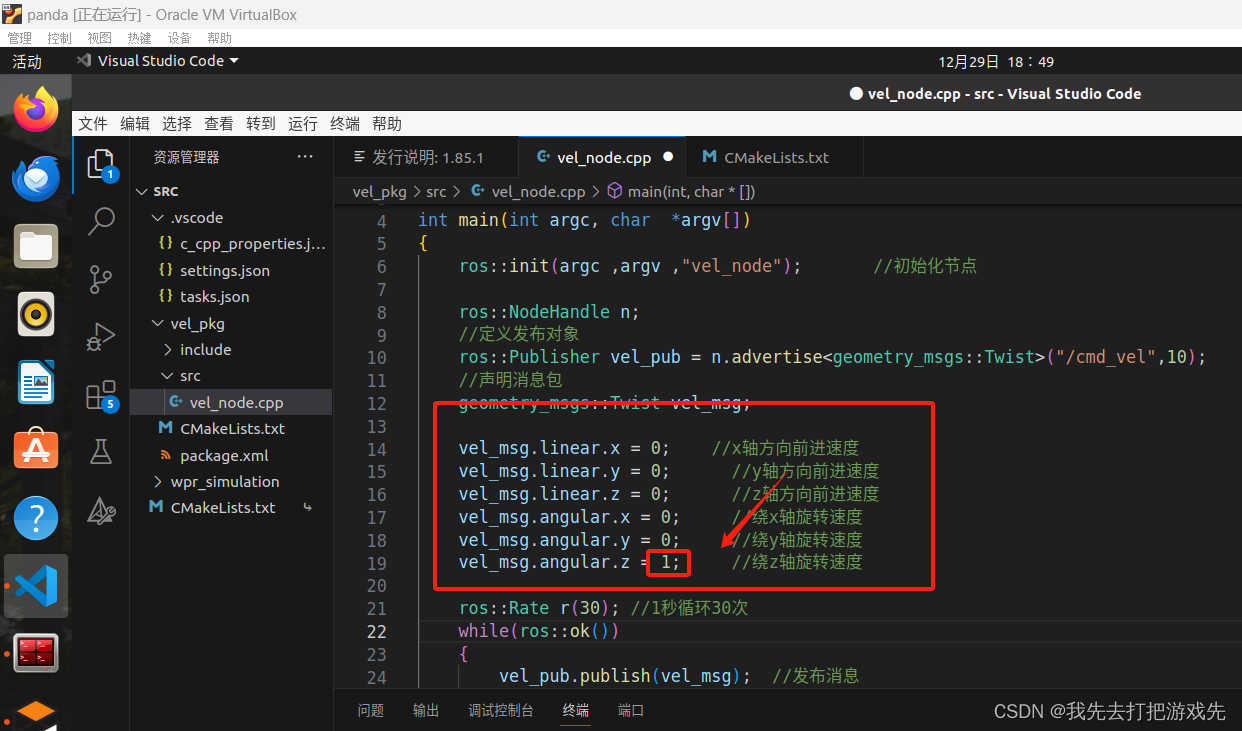
# include <ros/ros.h> # include <geometry_msgs/Twist.h> int main ( int argc, char * argv[ ] )
{ ros:: init ( argc , argv , "vel_node" ) ; ros:: NodeHandle n; ros:: Publisher vel_pub = n. advertise < geometry_msgs:: Twist> ( "/cmd_vel" , 10 ) ; geometry_msgs:: Twist vel_msg; vel_msg. linear. x = 0.1 ; vel_msg. linear. y = 0 ; vel_msg. linear. z = 0 ; vel_msg. angular. x = 0 ; vel_msg. angular. y = 0 ; vel_msg. angular. z = 0 ; ros:: Rate r ( 30 ) ; while ( ros:: ok ( ) ) { vel_pub. publish ( vel_msg) ; r. sleep ( ) ; } return 0 ; }
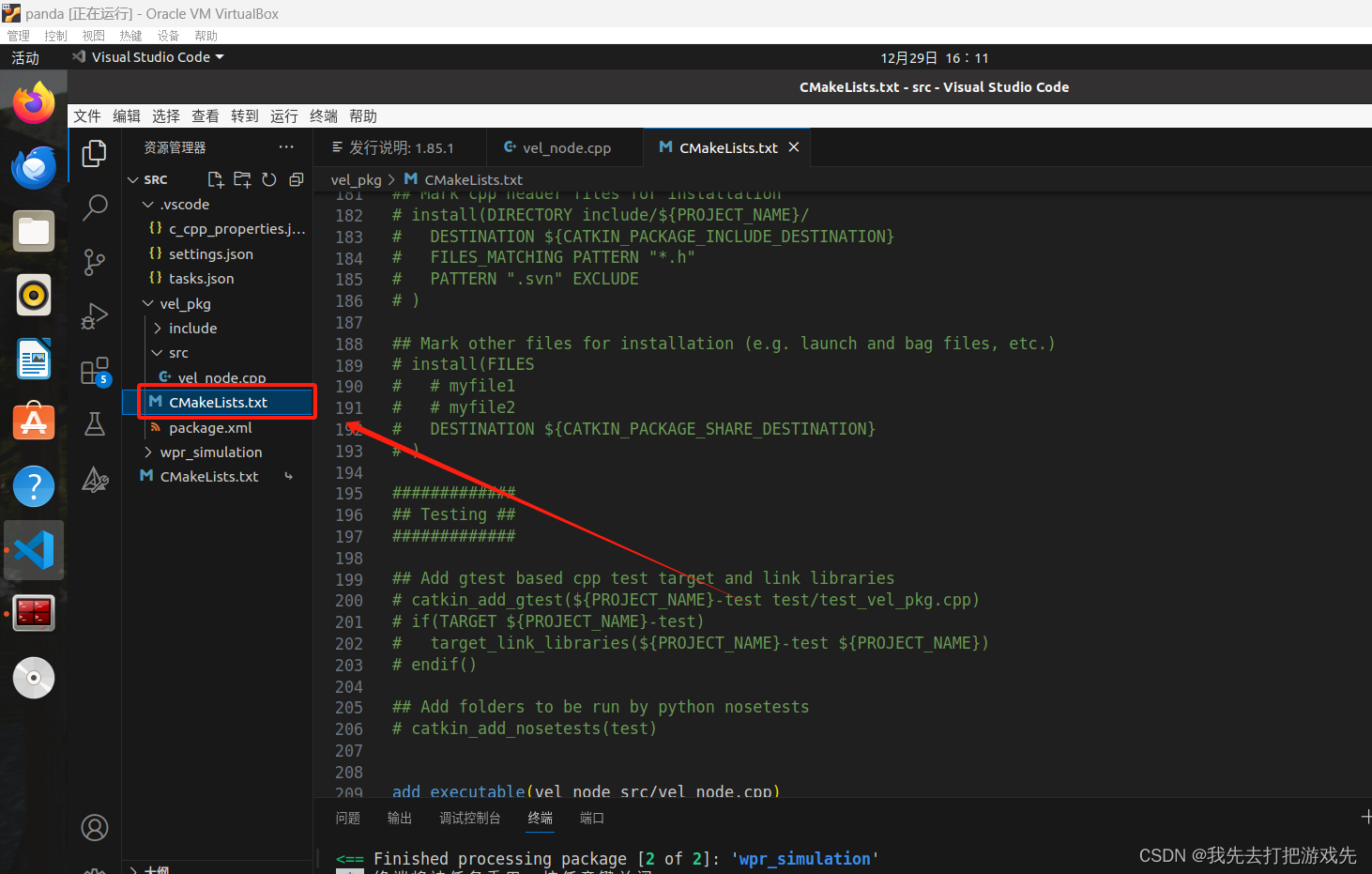
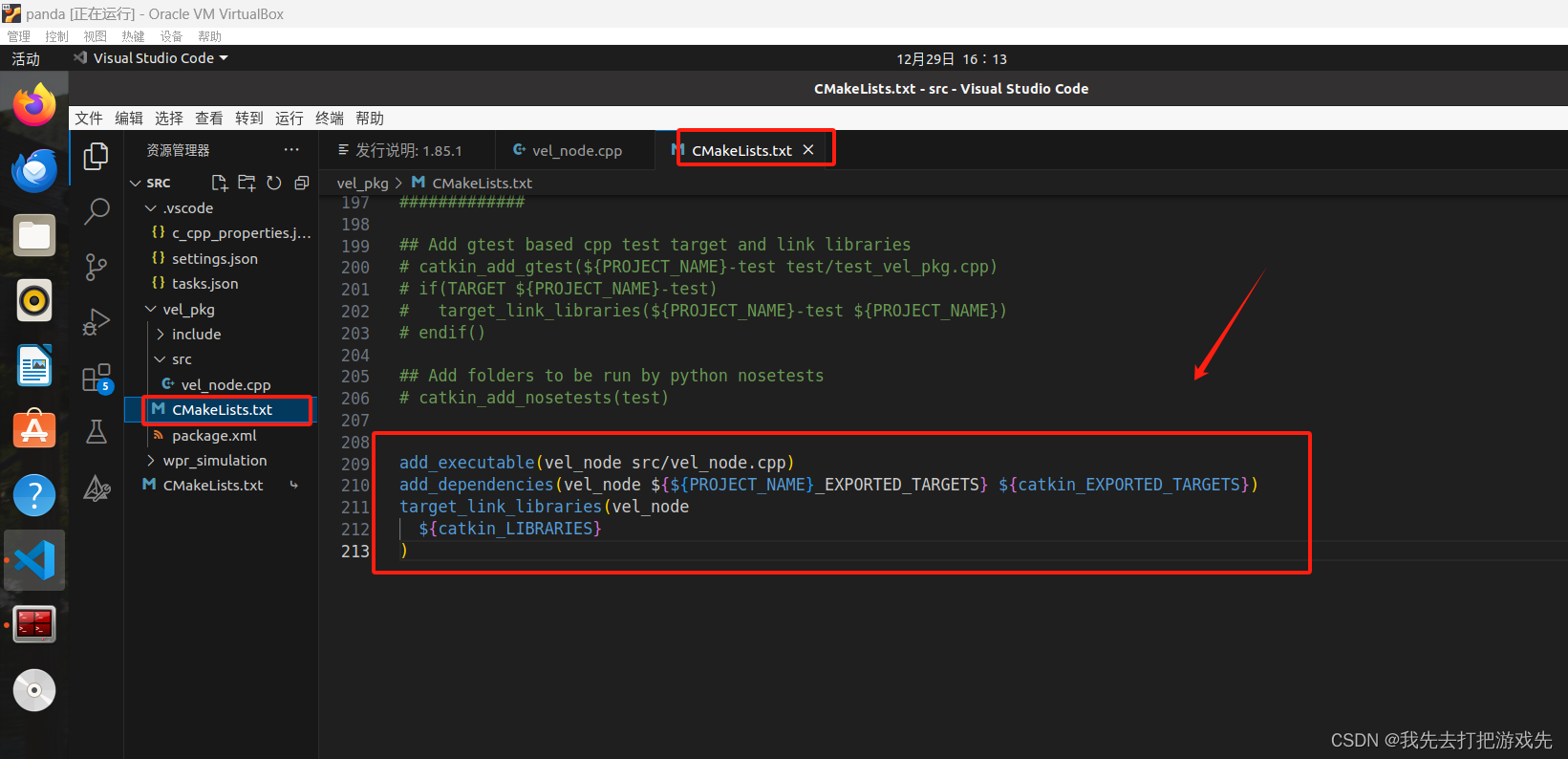
add_executable ( vel_node src/ vel_node. cpp)
add_dependencies ( vel_node ${ ${ PROJECT_NAME} _EXPORTED_TARGETS} ${ catkin_EXPORTED_TARGETS} )
target_link_libraries ( vel_node${ catkin_LIBRARIES}
)
source ./devel/setup.bash
roslaunch wpr_simulation wpb_simple.launch 将仿真环境运行起来
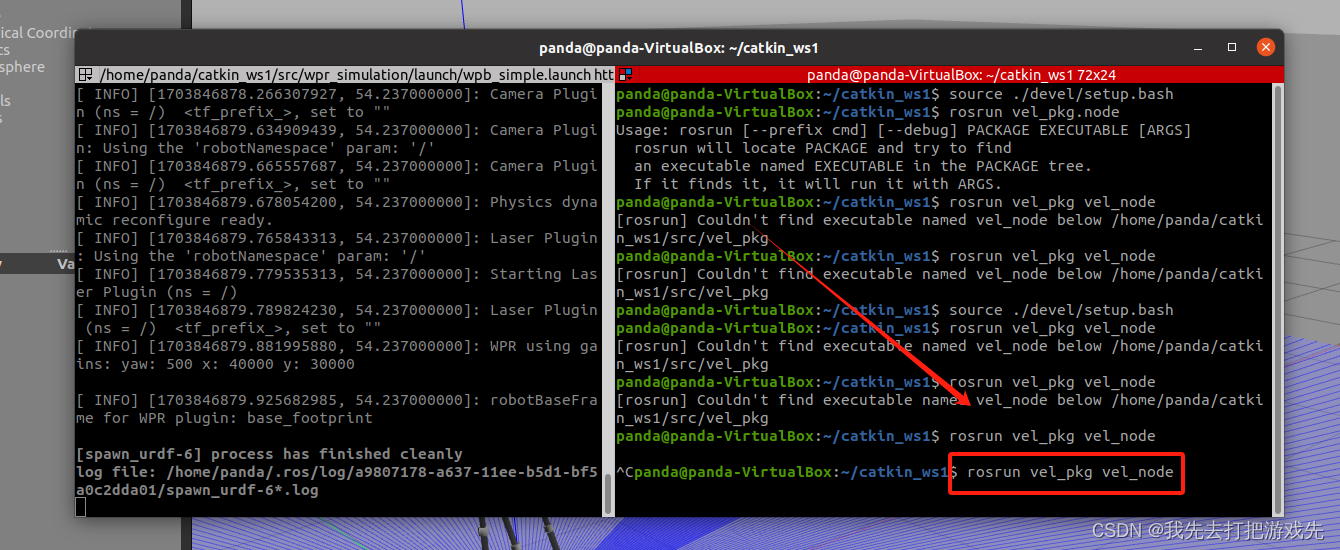
source ./devel/setup.bash
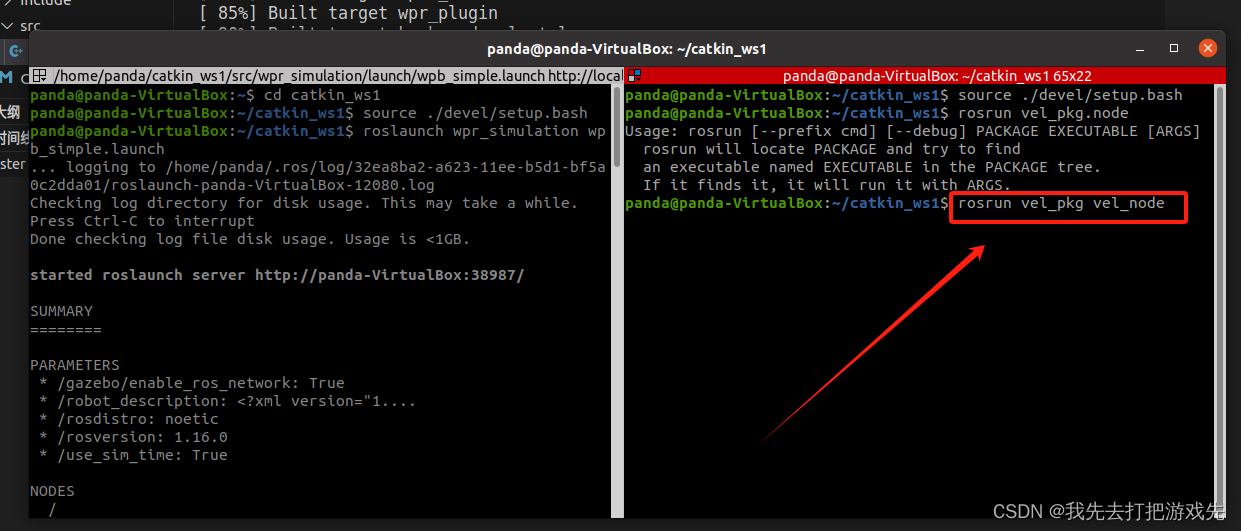
osrun vel_pkg vel_node 后回车