序列数据
机器学习的数据通常有两类,最常见的是独立同分布数据,其次就是序列数据。对于前者,一般出现在各种分类/回归问题中,其最大似然估计是所有数据点的概率分布乘积。对于后者,一般出现在各种时间序列问题中,比如在特定时间特定区域内的降雨量数据、每天的货币汇率数据,以及上下文相关的,如语音识别中的声学特征数据、文本的字符序列数据、生物领域如DNA数据等。需要指出,本文介绍的HMM模型适用于一切序列问题,而不仅仅是时序问题。
序列数据的平稳和非平稳性
在平稳状况下,虽然数据随时间变化,但数据的分布(或来源)不变。而对于非平稳状况,情况更为复杂,生成数据的分布本身也在变化。这里我们讨论简单的平稳情况。
马尔科夫模型(Markov models)
与马尔科夫决策过程(MDP)类似,本文讨论的马尔科夫模型也满足马尔科夫性,即未来的预测只依赖于最近的观测,而与过去的历史无关。换言之,马尔科夫性是指不具备记忆特质。这是因为,如果考虑未来观测对所有过去观测的通用依赖,就会导致复杂性的无限增加。而为了预测未来,最近的观测总是比过去历史的观测更有信息量、更有价值。
对于通用的马尔科夫链(Markov chain),我们可以用以下联合概率表示:
 (公式1)
(公式1)
其中表示观测序列,该式很好理解,即
现在考虑一阶马尔科夫链(first-order Markov chain),即满足未来的状态仅与当前状态相关,与任何历史的状态无关,用下图表示:
 (图1)
(图1)
此时上述公式变为:
 (公式2)
(公式2)
直观表示为:
根据马尔科夫性(未来只依赖于最近,而与过去的历史无关)可知:
![]() (公式3)
(公式3)
对于平稳序列数据,条件概率对于不同n是一样的,这样的模型叫做同质马尔科夫链。举个例子,如果这个条件概率依赖于某个可调节的参数(从训练数据中得到),那么该链的所有条件概率就能共享该参数。
现在考虑高阶马尔科夫链(higher-order Markov chain),即允许更早的观测对于此刻有影响,比如二阶马尔科夫链(second-order Markov chain)是允许预测值依赖于前两个观测。用下图表示:
 (图2)
(图2)
它的联合概率分布表示为:
 (公式4)
(公式4)
高阶马尔科夫链相对于一阶马尔科夫链增加了灵活性,但也增加了参数量。事实上,M阶马尔科夫链的参数随M指数级增加,从而导致该方法不实用。
隐马尔科夫模型(Hidden Markov models)
HMM在马尔科夫模型中引入隐变量(也叫潜在变量),已知有,现引入
,具体结构如下图所示:
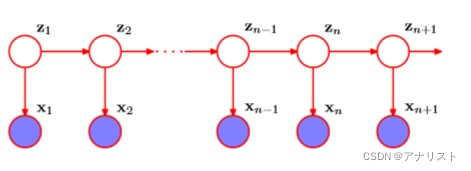 (图3)
(图3)
上图满足当给定时,
和
是条件独立的,即:
 (公式5)
(公式5)
因此,HMM的联合概率分布可表示为:
 (公式6)
(公式6)
观察可知,对于任意两个观测值和
,总存在一条经过隐变量的路径连接它们。因此,
的预测概率
不存在条件独立性,即
必定依赖于所有的
,换言之,观测变量X不满足任意阶的马尔科夫性。
假设每个隐变量有K个状态(或K个取值),则它可以表示为K维的向量,其中向量的值为1个元素为1,其余元素全为0. 我们对隐变量
定义一个条件概率
,那么该概率对于所有n的取值对应了一个矩阵,记为A。这个A就是转移矩阵,其中每个元素叫做转移概率。
我们把A的元素定义为
,它的含义是,在n-1时刻,z在j状态的取值为1,在n时刻,z在k状态的取值为1,事件发生的条件概率(可以看出,和n的取值无关,因为是平稳序列数据)。另外,由于
是概率,所以满足
,以及根据上文状态定义,有
。
条件概率用显式的公式可表示为:
 (公式7)
(公式7)
该式含义是:在以A为转移矩阵的背景下,隐变量Z在n-1时刻(即)向n时刻(即
)转移的总概率是A矩阵(KxK)若干元素的乘积,具体是n-1时刻在状态j的元素(即
)转移到n时刻在状态k的元素(即
)。
初始隐变量节点比较特殊,因为它没有父节点(没有节点指向它)。它的边际概率表示为:
 (公式8)
(公式8)
其中是概率
构成的向量,不难理解,
的含义是:在时刻1,隐变量Z处于k状态(即初始化状态是k)的概率。由于
的取值不是0就是1,因此
只有在状态取值为k(即
)时,才为
,而在其余状态(即
)都为1. 那么
就表示时刻1的隐变量的边际概率,它可通过对时刻1的所有K个状态累积得到。另外,根据定义有:
对于K=3的状态转移图可用下图表示:
 (图4)
(图4)
图中三个方形表示3个状态。黑色箭头曲线表示状态转移矩阵的元素。注意:这不是概率图模型(PGM,即 probabilistic graphical model),因为每个节点不是单独的变量,而是同一个变量的不同状态(在不同时刻取得)。因此这里的节点用方形而不是圆形表示。
把上图按照时间展开,就得到了一个包含隐变量的网格图,对于HMM就有如下形式:
 (图5)
(图5)
不难发现,每一列对应一个,每一行代表一个状态。
现在考虑条件概率,其中
是决定分布的一系列参数。这个由隐变量决定观测变量的条件概率叫做发射概率(即emission probabilities),对于离散的x(包括HMM场景),一般由条件概率表(CPT,即conditional probability tables )给出。另外,对于给定的
,由于
是长度为K的二元向量(元素非0即1),
同样对应一个包含K个元素的向量。
发射概率可具体表示如下:
 (公式9)
(公式9)
一些讨论:对于同质模型,控制隐变量的所有条件概率共享转移矩阵A,类似的,发射概率
共享所有的
。另外需要注意到,基于独立同分布数据的混合模型(如GMM)对应本文的特例,其中
对于所有的j是一样的;因此这导致
独立于
。此时相当于把图3所有的横向箭头曲线去除得到的模型。
现在给出隐变量和观测变量的联合概率分布的具体形式,相当于对公式6的具体化:
 (公式10)
(公式10)
其中{
},
{
},
{
,
,
}。从上式可看出对A和
共享的含义。
HMM的极大似然估计(EM算法)
当我们得到观测值{
},我们可以利用极大似然估计(MLE)来计算HMM的未知参数。HMM的X的边际概率可表示如下:
 (公式11)
(公式11)
是对Z和X的联合概率
对隐变量Z的求和得到。由于联合概率
无法分解为n项因子的乘积,我们无法独立的对每个
进行求和。另外因为有N个变量需要求和,其中每个变量是K维向量(包含K个状态),因此总共有
项数值需要求和,是HMM链路长度N的指数级别,也就无法直接求和。(注意:公式11的求和对应了图5的网格图中指数量级的路径之和。)
这时候我们想到EM算法。EM算法需要对模型参数进行初始化,记为;E步骤中,我们利用
计算出隐变量的后验概率
;然后用该后验概率在M步骤中计算出
,具体公式如下:
 (公式12)
(公式12)
(关于EM算法以及公式12的来源,见本人另一篇博客:
EM算法(expectation maximization algorithms)揭秘 )
现在给出一些函数符号,我们把隐变量的边际后验概率记为
,具体如下:
(公式13)
把两个相邻的隐变量和
的联合后验概率记为
,具体如下:
(公式14)
对于每个时刻n,由于是一个K维的二元向量(只有一个1,其余全是0),因此
是一个K维的非负且元素和为1的向量。类似的,
是一个KxK维的矩阵,且其元素也是非负且和为1.我们用
表示
的概率。
表示
且
的联合概率。由于二元随机变量(非0即1)的期望等于它取值为1的概率,因此有:
 (公式15)
(公式15)
 (公式16)
(公式16)
现在将公式10的联合概率分布代入公式12,并且利用公式15和公式16中和
的定义,得到:
 (公式17)
(公式17)
验证提示:上式右边第一项需要用到的定义
,
的属性
,以及
的定义(即公式8);上式右边第二项需要用到
的定义
,以及
的定义(即公式7);上式右边第三项需要用到
的定义(即公式9)。
在E步骤中,我们计算和
的值,这就需要计算
也就是
的值,可以看到,和上文提到的EM算法的E步骤对应起来了。
在M步骤中,我们将{
}看成变量,同时将
和
看成常量,对
进行最大化。其中对于
和
变量比较简单,可分别用拉格朗日乘子法,得到结果(过程省略):
 (公式18)
(公式18)
 (公式19)
(公式19)
EM算法要求对变量和
选取恰当的初始值,应当分别满足求和为1的约束和非负约束。另外注意到,
和
一旦被初始化为0,在EM迭代过程中会一直保持为0.
当把看成变量,对
进行最大化时,注意到公式17只有第三项有
,此时这一项的形式和高斯混合模型完全一致(见EM应用篇(GMM))。本文的
同样起到某种“责任”的作用,或说负责解释的比例。现在考虑观测概率
的具体形式,它可以是高斯概率分布,离散多项式概率分布,或伯努利概率分布等。(在李航《统计学习方法》第10章,介绍HMM时,只给出了观测概率矩阵B,并未讨论产生它的概率分布。是否这个讨论是必要的?)
对于高斯概率分布,假设符合以下形式,即
具体对应了两个参数:高斯的均值
和协方差
。那么此时对
最大化,我们得到最优解(过程省略):
 (公式20)
(公式20)
 (公式21)
(公式21)
对于离散多项式概率分布,观测概率符合以下形式:
 (公式22)
(公式22)
注意,它只有一个参数。同样在M步骤中对
最大化,得到最优解(过程省略):
 (公式23)
(公式23)
思考:对于伯努利概率分布,情况如何?
EM算法的初始值很重要,这里有个技巧,首先把HMM的时序数据看成独立同分布数据,并用MLE对观测概率分布进行拟合。然后用最终结果来初始化EM算法。
前向与后向算法
下面解决上述EM算法中E步骤的和
的高效计算问题。前向与后向算法(forward-backward algorithm (Rabiner, 1989))就是为了解决这个问题。不过这里有争议:有学者认为前向与后向算法就是Baum-Welch算法(Baum-Welch algorithm (Baum, 1972)),或至少是接近的,或存在包含关系,代表人物是《PRML》的作者。但也有学者认为,前向与后向算法和Baum-Welch算法(属于EM算法)是并列关系,是相互独立的,分别解决HMM的第一个问题(即概率计算问题)和第二个问题(即参数学习问题),代表人物是《统计学习方法》的作者。而维基百科的观点是:Baum-Welch 算法是EM算法的一个特例,用于查找隐马尔可夫模型(HMM) 的未知参数,它利用前向-后向算法来计算期望步骤(即E步骤)的统计数据。言归正传,前向与后向算法有多个变体,其中最通用的算法叫做alpha-beta算法。
接下来的讨论将忽略对模型参数的显式依赖,因为它始终是固定的值。以下条件独立性来自论文(Jordan, 2007):

其中{
}。这些公式不难证明,有的能直接观察出来,下面依次验证。
公式24:相当于把从n时刻处截断,由两部分的条件独立性得证。
公式25:由于隐变量能决定观测变量
,因此
作为冗余条件可消去,得证。
公式26:由于隐变量能决定隐变量
,因此
作为冗余条件可消去,得证。
公式27:和公式26不同,这里要决定n+1到N时刻的值,保留即可。
公式28:与公式25类似。
公式29:把从n处分割成三段,结合HMM的图结构,应用贝叶斯公式可得。
公式30:只由
决定,与
无关,得证。
公式31:只由
决定,与
无关,得证。
现在考虑的计算问题。我们从
的后验概率
入手(见公式13),其中
是K维二元向量,其每个元素记为
。利用贝叶斯公式,我们得到:
![]() (公式32)
(公式32)
与公式13不同,这里省略了的记号。事实上
由
隐式决定,它表示一个似然估计。现在基于公式24的条件独立性,可将
进一步改写得到:
![]() (公式33)
(公式33)
其中和
的定义分别为:


表示
和直到n时刻的观测数据的联合概率;
表示所有n+1到N时刻的未来数据相对于
的条件概率。与
一样,
和
也是K维向量,
的每个元素用
表示,此时表示
。
同理。
接下来推导的迭代关系,下面的推导用到公式25和公式26的条件独立性,
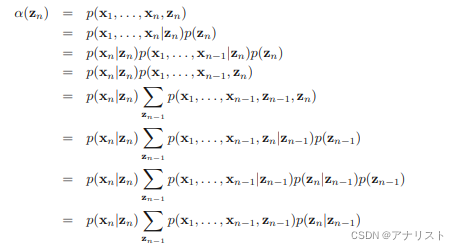
上式最后一步就是
,因此我们得到:
![]() (公式36)
(公式36)
上式迭代(即前向算法)的时间复杂度为
,它的网格图如下:
 (图6)
(图6)
上图表明是由各个
加权求和得到,权重是各个
,而
就对应不同状态到达状态k=1的
,加权求和结果要乘以
才表示最终的
。
的迭代初始值
由以下公式给出:
 (公式37)
(公式37)
这表明每个以
形式给出,其中k=1,...,K。这样就能顺着隐变量链得到每个
的
函数值,即
。整个链路有N个时刻,因此总时间复杂度为
。
类似的,可以推导的迭代关系,下面的推导用到公式27和公式28的条件独立性,
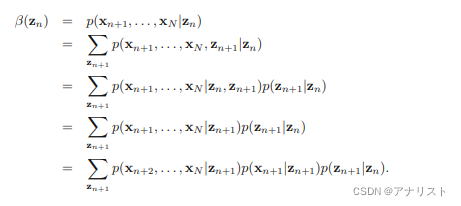
上式最后一步就是
,因此我们得到:
 (公式38)
(公式38)
上式利用
迭代计算(即后向算法),同时基于发射概率
以及转移概率
,它的网格图如下:
 (图7)
(图7)
上图对应公式中的
,表示从n时刻的状态k=1转移到n+1时刻的状态k的转移概率。
为了解决的迭代初始化,首先对公式33取n=N,并将公式34代入,可得:
![]() (公式39)
(公式39)
其中{
};而
,见公式13,省略了
。此时发现,只要规定:对于任意的
,满足
,就能让公式39恒成立(根据贝叶斯公式)。
解决完的计算问题后,高斯概率分布的M步骤中的
(即公式20)就有了新的形式:
 (公式40)
(公式40)
在EM优化过程中,对似然概率的监控很有必要,现在让公式33两边对
求和,那么左边就变为1,即
,那么调整可得:
![]() (公式41)
(公式41)
当我们取,即假设
是所有元素为1构成的向量。那么
可简化为:
![]() (公式42)
(公式42)
此时不需要的迭代,只需要
函数。现在重新理解
,原先有
,公式42相当于把
计算量从指数级别降低到线性。
接下来解决的计算问题,它的定义来自公式14,即
,结合贝叶斯定理,可得:

![]() (公式43)
(公式43)
上式比较简单,其中倒数第2行的第一项和第五项相乘等于,第三项等于
。因此我们同样能够利用
和
的迭代,对
进行计算。
HMM预测下一个数据
HMM一个有趣且重要的应用是预测下一个x数据。比如已知观察值{
},要求预测
,这个在实时应用比如金融预测中很重要。我们利用公式29和公式31的条件独立性,结合简单的概率乘法和加法,可得:
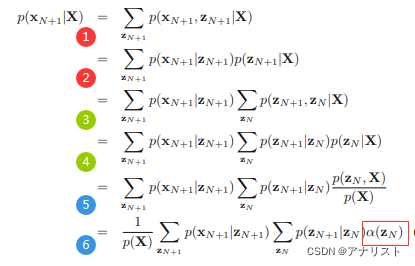 (公式44)
(公式44)
第1步将的边际概率扩展为和
的联合概率,需要对
求和消去
;
第2步利用贝叶斯公式,将联合概率分解为两项;
第3步将第2步的边际概率扩展为和
的联合概率;
第4步将第3步的联合概率分解为两项;
第5步利用贝叶斯公式,将改写为
;
第6步将常量提取到求和外面,同时套用公式34将
替换成
因此可通过先前向迭代计算
,再分别对
和
求和得到。需要指出,对
的求和结果可暂时保存,等到处理
时被再次利用。计算
等以此类推。
维特比算法(Viterbi algorithm)
HMM的许多应用中,隐变量具有重要的含义,因此有必要找到已知观测序列对应的最有可能的隐状态序列。例如在语音识别中,需要找到给定声音对应的最有可能的文本序列。由于HMM是一个有向图,该问题可以用最大-求和算法(max-sum algorithm或max-product algorithm)精确处理。(说明:最大-求和算法依赖sum-product algorithm,后者将联合概率表达为因子图(factor graph);最大-求和算法是图模型上的一个DP算法,它用于找到具有最大概率的变量集合。由于篇幅限制,本文不详细介绍这两个算法。)
需要指出,隐变量(或隐状态)的最有可能的序列并不等价于它们单独都是最有可能的。后一个问题可以通过首先运行前向-后向算法来找到每个隐变量的边际概率,然后单独最大化它得到。但是这样找到的隐状态通常并不是最有可能的状态序列。甚至最差情况,这样找到的状态序列可能具有零概率,即完全不存在,尽管它们单独都是最有可能的,这是因为在转移矩阵中,连接它们的矩阵元素为0。
和最大-求和算法类似,维特比算法也是DP算法,二者时间复杂度接近,都能将指数级别的解码问题转化为线性代价。首先,我们定义函数表示到n时刻所有路径中的概率最大值(取对数)为:
(公式45)
式中把看成自由变量,对每个
变量(K维向量)的状态进行选择,选择使得X和Z的联合概率的对数最大化的(即最有可能的序列),直到到达
。注意:为了简化公式,省略了模型参数
;事实上,在寻找最有可能序列过程中,参数
是固定的。
根据HMM的定义(公式6),结合公式45,不难发现的迭代形式:
(公式46)
其中初始值由公式45可得:
(公式47)
一旦完成直到的最大化,我们将得到最优路径对应的联合概率
的ln值。为了找到隐状态的最优序列,我们可以使用一种回溯法(也叫倒推法,back-tracking)。我们把从
到
的K个可能状态的概率最大的状态序号保存到
函数中,其中
。一旦消息传递到HMM的末端,并且找到了概率最大的
状态,就可以利用该函数进行迭代回溯:
(公式48)
直到推出n=1时刻的最大概率状态序号,我们就得到了最优路径:
参考资料
维特比算法,维基百科。
Baum-Welch 算法,维基百科。
《模式识别与机器学习》,2006 年。
《统计学习方法》,2012年。