verilog编程题
文章目录
- verilog编程题
- 序列检测电路(状态机实现)
- 分频电路
- 计数器
- 译码器
- 选择器
- 加减器
- 触发器
- 寄存器
序列检测电路(状态机实现)
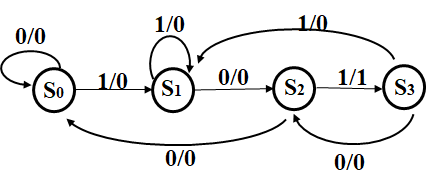
module Detect_101(input clk,input rst_n,input data,output flag_101);parameter S0 = 0,S1 = 1,S2 = 2,S3 = 3;reg [1:0] state;always @(posedge clk or negedge rst_n)beginif(rst_n == 1'b0)beginstate <= S0;endelse begincase(state)S0: if(data == 1)state <= S1;else state <= S0;S1: if(data == 0)state <= S2;else state <= S1;S2:if(data == 1)state <= S3;else state <= S0;S3:if(data == 1)state <= S1;else state <= S2;default:state <=S0; endcaseend
endassign flag_101 = (state == S3)? 1'b1: 1'b0;endmodule
分频电路
采用触发器反向输出端连接到输入端的方式,可构成简单的 2 分频电路。
以此为基础进行级联,可构成 4 分频,8 分频电路。
按题目要求,几分频就留哪个。
module even_divisor# (parameter DIV_CLK = 10 )(input rstn ,input clk,output clk_div2,output clk_div4,output clk_div10);//2 分频reg clk_div2_r ;always @(posedge clk or negedge rstn) beginif (!rstn) beginclk_div2_r <= 'b0 ;endelse beginclk_div2_r <= ~clk_div2_r ;endendassign clk_div2 = clk_div2_r ;//4 分频reg clk_div4_r ;always @(posedge clk_div2 or negedge rstn) beginif (!rstn) beginclk_div4_r <= 'b0 ;endelse beginclk_div4_r <= ~clk_div4_r ;endendassign clk_div4 = clk_div4_r ;//N/2 计数reg [3:0] cnt ;always @(posedge clk or negedge rstn) beginif (!rstn) begincnt <= 'b0 ;endelse if (cnt == (DIV_CLK/2)-1) begincnt <= 'b0 ;endelse begincnt <= cnt + 1'b1 ;endend//输出时钟reg clk_div10_r ;always @(posedge clk or negedge rstn) beginif (!rstn) beginclk_div10_r <= 1'b0 ;endelse if (cnt == (DIV_CLK/2)-1 ) beginclk_div10_r <= ~clk_div10_r ;endendassign clk_div10 = clk_div10_r ;
endmodule
计数器
module Count
(input clk ,input rst_n ,output reg [ 3:0] cnt
);always @(posedge clk or negedge rst_n)beginif(!rst_n)cnt <= 4'd0;else if(cnt==4'd9)cnt <= 4'd0;elsecnt <= cnt + 1'b1;
endendmodule
译码器
`timescale 10ns/1ns
module decode3_8 (data_out,data_in,enable) ;
input [2:0] data_in;
input enable;
output [7:0] data_out;
reg [7:0] data_out;always @(data_in or enable)
beginif (enable==1)case (data_in )3'b000: data_out=8'b11111110;3'b001: data_out=8'b11111101;3'b010: data_out=8'b11111011;3'b011: data_out=8'b11110111;3'b100: data_out=8'b11101111;3'b101: data_out=8'b11011111;3'b110: data_out=8'b10111111;3'b111: data_out=8'b01111111;default: data_out=8'bxxxxxxxx;endcaseelsedata_out=8'b11111111;
endendmodule
选择器
代码为4选1,如果题目是2选1或者更多选1就case后进行更改
module mux_4_1 (input C, D, E, F,input [1:0] S,output reg Mux_out
);always @ (C or D or E or F or S) begincase(S)2'b00 : Mux_out = C;2'b01 : Mux_out = D;2'b10 : Mux_out = E;default : Mux_out = F;endcase
endendmodule
加减器
16位加减法器。当sub为1时,是减法;当sub为0时是加法。
看题目要求,有几位写几位
module top_module(input [31:0] a,input [31:0] b,input sub,output [31:0]sum);
wire [31:0]xor_1;
wire [15:0]sum_1;
wire [15:0]sum_2;
wire cout_1,cout_2;
//xor xor_gate(xor_1,b,sub);//逻辑或,我们这里的设计不应该是逻辑或,应该是下边的按位取或
assign xor_1 = b^{32{sub}} ;//按位异或
assign sum = {sum_2,sum_1};
add16 u1_add16(.a(a[15:0]),.b(xor_1[15:0]),.cin(sub),.sum(sum_1),.cout(cout_1));
add16 u2_add16(.a(a[31:16]),.b(xor_1[31:16]),.cin(cout_1),.sum(sum_2),.cout(cout_2));endmodule触发器
带同步清0、同步置1的D触发器
module D_EF(q,qn,d,clk,set,reset)input d,clk,set,reset;output q,qn;reg q,qn;always @ (posedge clk)beginif(reset) begin q<=0;qn<=1;end//同步清0,高有效else if(set) begin q<=1;qn<=1;end //同步置1,高有效else begin q<=~d;qn<=~d;endend endmodule
寄存器
有异步清零端的n位寄存器,看题目要求,有几位n就写几
module regn(D,clk,reset,Q);parameter n=16;input [n-1] D;input clk,reset;output [n-1] reg Q;always @(negedge reset,posedge clk)if(!reset) //复位端reset低电平有效Q<=0;elseQ<=D;endmodule