本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Ch04 Advanced控制理论
- 1. 绪论
- 2. 状态空间表达State-Space Representation
- 3. Phase Portrait相图,相轨迹
- 3 1. 1-D
- 3 2. 2-D
- 3 3. General Form
- 3 4. Summary
- 3.5. 爱情中的数学-Phase Portrait 相图动态系统分析
- 3.6 连续系统离散化
- 4. 系统的可控性Controllability(LTI)线性时不变
- 5. 稳定性stability-李雅普诺夫Lyapunov
- 6. 线性控制器设计Linear Controller Design
- 7. LQR控制器 Linear Quadratic Regulator
- 8. 状态观测器设计 Linear Observer Design
- 9. 可观测性与分离原理
- 10. 现代控制理论串讲
- 11. 非线性控制理论基础 Lyapunov直接方法
- 12. Invariance Princilpe-LaSalle;s Theorem不变性原理
- 13. Nonlinear Basic Feedback Stabilization 非线性系统稳定设计
- 14. Nonlinear Backstepping Control反馈线性化控制
- 15. NonlinearAdaptive Controller非线性自适应控制器
- 16. Robust Controller非线性鲁棒控制器
- 16.1 Slide Control 滑膜控制
- 16.2 High Gain + High Frequency
- 16.3 三种鲁棒控制器的比较+如何分析控制器
- 17. 三种鲁棒控制器的比较+如何分析控制器
1. 绪论

2. 状态空间表达State-Space Representation


状态空间方程的解——矩阵指数函数

3. Phase Portrait相图,相轨迹
3 1. 1-D

3 2. 2-D

3 3. General Form


3 4. Summary

3.5. 爱情中的数学-Phase Portrait 相图动态系统分析

3.6 连续系统离散化



4. 系统的可控性Controllability(LTI)线性时不变


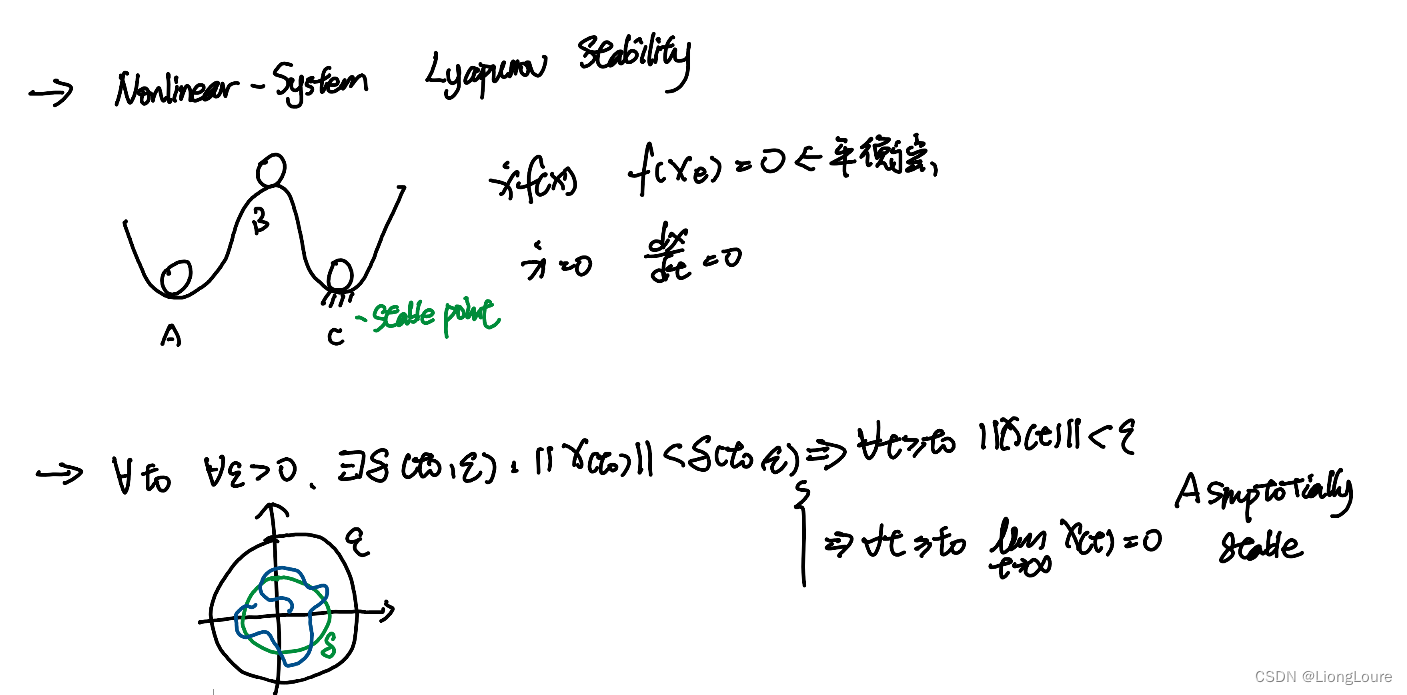
5. 稳定性stability-李雅普诺夫Lyapunov
Stability in the sense of Lyapunov

Assympototic Stability



6. 线性控制器设计Linear Controller Design



7. LQR控制器 Linear Quadratic Regulator


线性控制器设计-轨迹跟踪(Fellow a Desired Path)


8. 状态观测器设计 Linear Observer Design



9. 可观测性与分离原理



10. 现代控制理论串讲

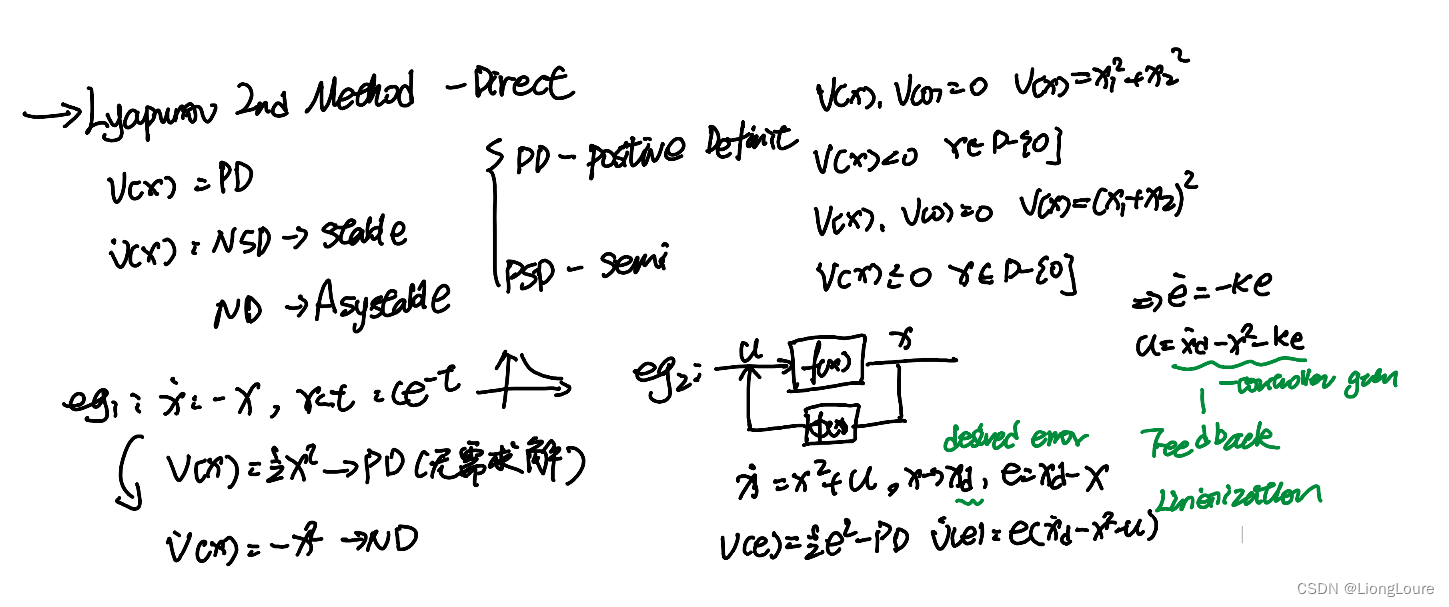
11. 非线性控制理论基础 Lyapunov直接方法



12. Invariance Princilpe-LaSalle;s Theorem不变性原理

13. Nonlinear Basic Feedback Stabilization 非线性系统稳定设计


14. Nonlinear Backstepping Control反馈线性化控制



Nonlinear Backstepping Controller 补充习题 - Backsteeping controller Design Review

15. NonlinearAdaptive Controller非线性自适应控制器

16. Robust Controller非线性鲁棒控制器
Robust Control : tp achieve robust performance and/or stability in percence of bounded modeling error

16.1 Slide Control 滑膜控制



16.2 High Gain + High Frequency




16.3 三种鲁棒控制器的比较+如何分析控制器


17. 三种鲁棒控制器的比较+如何分析控制器




![[C#]利用paddleocr进行表格识别](https://img-blog.csdnimg.cn/direct/ddca10cd7ff844ceac57722395c9d97c.jpeg)