ubuntu22.04安装ROS2 教程
- 选择对应版本
- 进行安装
- 设置编码
- 添加源
- 安装ROS2
- 设置环境变量
- 运行ROS2
选择对应版本
通过官方网站,查询Ubuntu与ros对应的版本,版本不一致也会出现安装不成功。
https://wiki.ros.org/ROS/Installation
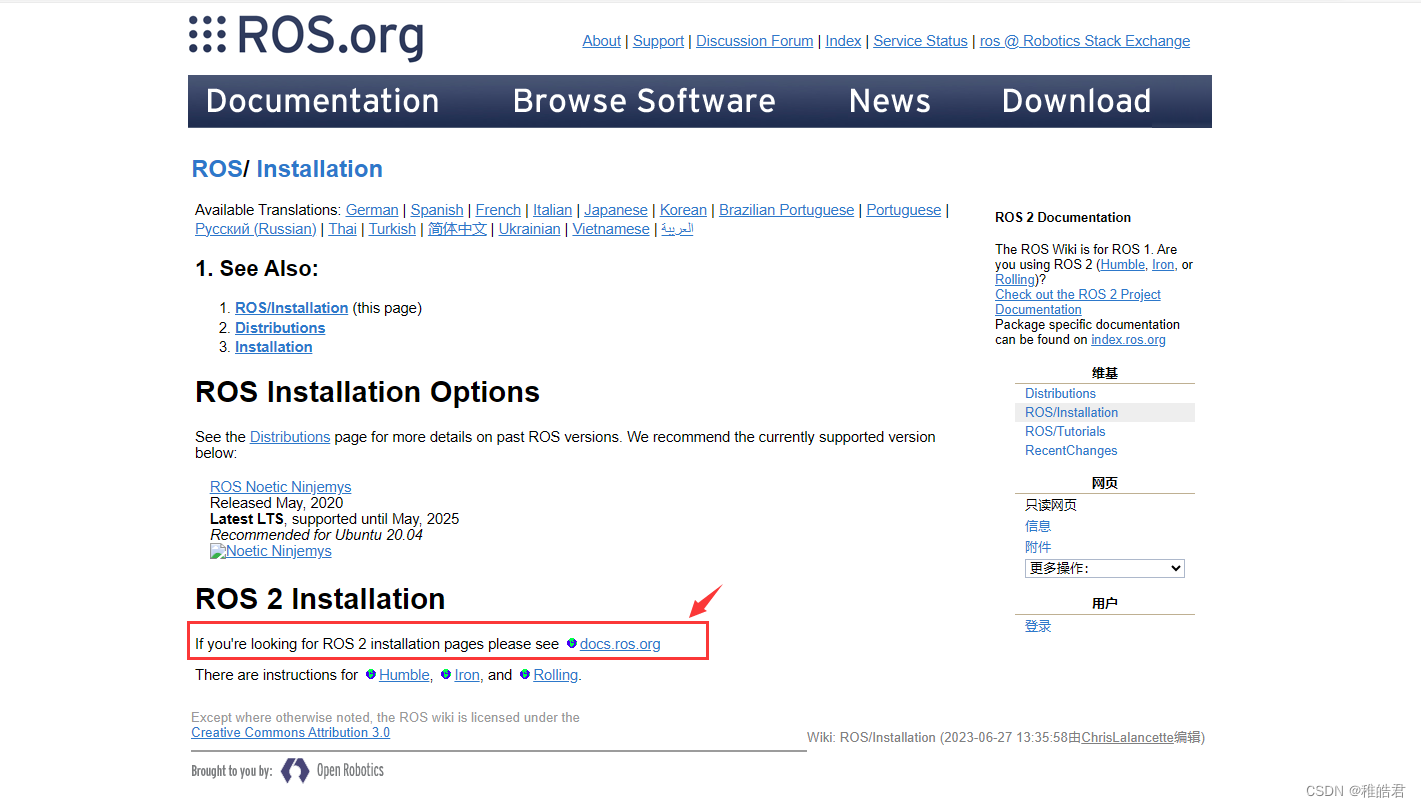
每一个都可以进行点击,查看对应的Ubuntu对应的版本
与Ubuntu22.04对应的ROS2版本为Humble,所以,我们在安装时应选择安装该版本
进行安装
设置编码
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
添加源
需要将 ROS 2 apt 存储库添加到系统中。
首先,确保 Ubuntu Universe 存储库已启用。
sudo apt install software-properties-common
sudo add-apt-repository universe
现在使用 apt 添加 ROS 2 GPG 密钥。
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
然后将存储库添加到源列表。
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装ROS2
sudo apt update
sudo apt upgrade
## 推荐桌面版,比较推荐。
sudo apt install ros-humble-desktop
## 安装时间可能较长,安心等待。
安装完成
设置环境变量
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
运行ROS2
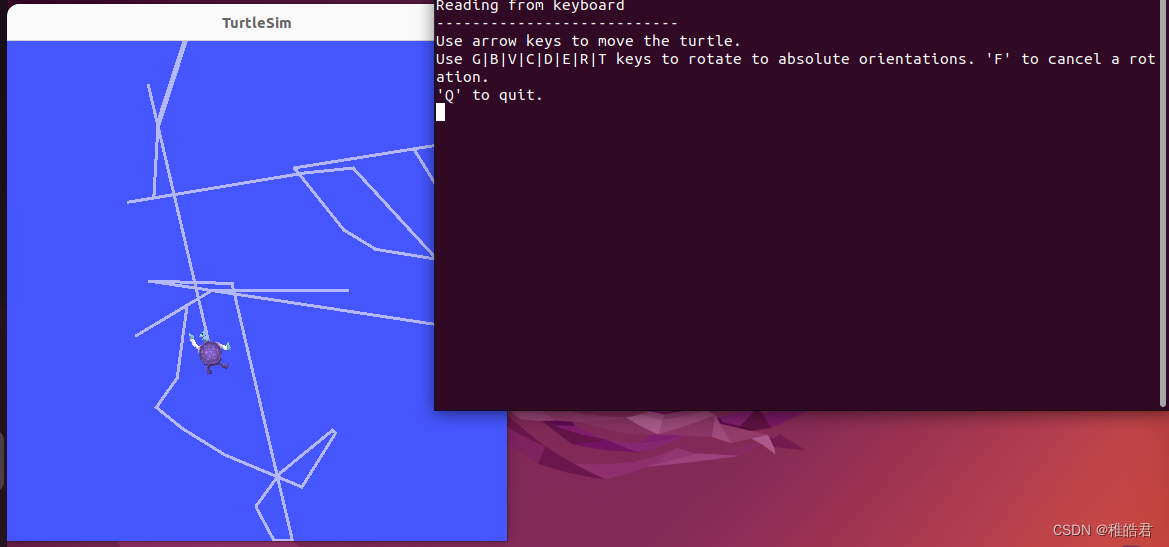
ROS中的经典示例——小海龟仿真器
输入下列指令将启动一个蓝色背景的海龟仿真器
ros2 run turtlesim turtlesim_node
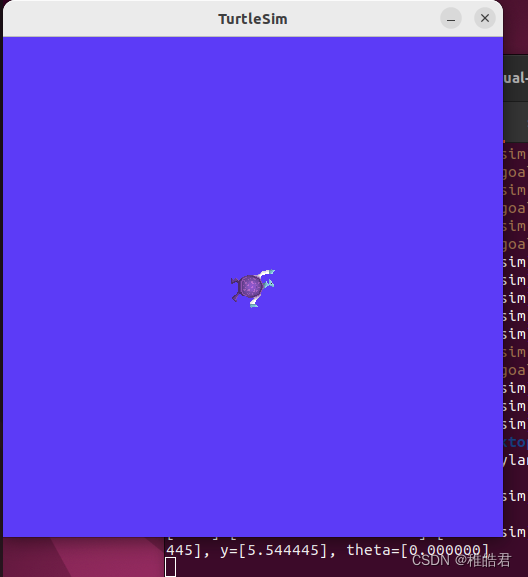
新开一个终端,并输入下列指令将启动一个键盘控制节点
ros2 run turtlesim turtle_teleop_key
在该终端中点击键盘上的“上下左右”按键,就可以控制小海龟运动了。