🎇个人主页:Ice_Sugar_7
🎇所属专栏:初阶数据结构
🎇欢迎点赞收藏加关注哦!
八大排序2
- 🍉快速排序
- 🍌霍尔版本
- 🍌挖坑法
- 🍌前后指针法
- 🍉快排优化
- 🍌三数取中
- 🍌小区间直接插入
- 🍌非递归快排
- 🍉归并排序
- 🍌递归
- 🍌非递归
- 🍉计数排序(了解即可)
🍉快速排序
快排的基本思想是从序列中选某一个元素为key,然后开始多次排序,每次排完后key左边的值都小于key,右边则都大于key。然后对key左右的区间([begin,key - 1]和[key+1,end],左右都是闭区间)分别进行递归,划分为更小的区间,直到成为有序区间再返回。最终整个区间就是有序的
所以,快排的递归过程可以看作是一棵二叉树
●每次选择一个基准元素,将小于基准的元素放在左子树,大于基准的元素放在右子树。然后对左子树和右子树分别进行快排。这个过程可以一直递归下去
●直到每个子树只剩下一个或没有元素(即递归到叶子节点)时返回
快排的框架如下:
void QuickSort(int* a, int left, int right) { //left和right是区间端点(都是闭区间)if (right <= left) //right如果小于left,那么这个区间不存在;right==left说明这个区间只有一个元素return;int key = PartSort(a, left, right); //PartSort是找key的函数,下面会讲QuickSort(a, left, key - 1);QuickSort(a, key + 1, right);
}
快排的核心就是找key,有三种方法找key,下面依次介绍
先解释两个概念:找大和找小:
找大:一直向左走或向右走,直到找出比key大的值,或者找不到
找小:一直向左走或向右走,直到找出比key小的值,或者找不到
🍌霍尔版本
霍尔版本的快排是原始版本,先看动图:

这种方法具体步骤如下:
●假设序列最左边的值为key,让右边(right)先走,找小。
●找到后停下,轮到左边(left)走,找大。找到后停下,交换此时left和right处的元素。
●重复这个过程,直到left和right相遇,交换此时left和key处的值
●到这里,序列以key为分界线,划分左、右两个区间
注意:假设哪边为key,那么一开始就要让另一边先走
int PartSort1(int* a, int left, int right) {int keyi = left;while (left < right){//右边先走,找小while (left < right && a[right] >= a[keyi]){--right;}//左边找大while (left < right && a[left] <= a[keyi]){++left;}Swap(&a[left], &a[right]);}Swap(&a[left], &a[keyi]);return left;
}
🍌挖坑法
相较于霍尔版,挖坑法的逻辑更好理解

●假设序列最左边的值为key,右边先走,直到遇见比key小的值,就把这个值填入坑中,然后自己成为新的坑
●right走完后,轮到left走,left是遇到比key大的值才停下来。然后同样把这个值扔进坑里,自己成为新的坑
●left和right相遇时,将key填入坑中(此时坑位就是left和right所在位置)
int PartSort2(int* a, int left, int right) {int hole = left;int tmp = a[hole]; //保存最开始坑位的值while (left < right){while (left < right && a[right] > tmp) //相等的话可以不移动,不会死循环{--right;}a[hole] = a[right]; //遇到比坑位小的值hole = right; //更新坑位下标while (left < right && a[left] < tmp){--left;}a[hole] = a[left];hole = left; //更新坑位}a[hole] = tmp;return hole;
}
🍌前后指针法
●定义两个指针prev、cur,prev一开始位于最左边,cur在prev的下一个位置。让cur开始走,往右找小,如果遇到比key小的值,那就让prev++,然后交换a[prev]和a[cur]
(但如果prev++之后和cur一样的话,那就没必要交换了)
●当cur遇到比key大的值时,此时prev不走,cur照常走
按照这种规律,那prev就会在第一个比key大的值的前面停下来
而cur继续走,再遇到比key小的值时,由于prev++,所以就会将那个小的数和这个大的数交换位置,相当于把大的数和小的数分别甩到后面和前面
●当cur走到最右边时,循环结束,交换prev和key处的值
(此时cur处的值比a[key]小,就把它甩到前面了)
int PartSort3(int* a, int left, int right) {int mid = GetMidi(a, left, right); //采用三数取中的方法取中间数,优化快排,下面会讲这种方法Swap(&a[left], &a[mid]);int key = mid;int prev = left, cur = left + 1;while (cur <= right){if (a[cur] < a[key] && ++prev != cur) //遇到比key小的值,就++prev,然后若prev和cur不相等,那就交换prev和cur{Swap(&a[prev], &a[cur]);}//如果比key大,那cur就继续走++cur;}Swap(&a[prev], &a[key]);return prev;
}
🍉快排优化
由于快排的递归过程可以看作是二叉树,所以我们可以根据二叉树的特点对快排进行优化,提高其效率
🍌三数取中
对于同样的n个元素,如果二叉树越斜,那么它就越深;而如果二叉树比较平衡,那么深度就比较浅(完全二叉树深度最浅)
前面我们快排取的key要么是最左,要么是最右,如果key处的值刚好是最大值或最小值的话,那对快排是相当不利的
而反之,如果key是序列的中位数,或者是接近中位数(总之就是尽可能不让它成为最值),那就可以极大提高快排的效率
所以写一个三数取中的函数,从left、right和mid(序列中间的那个数)三者中取大小在中间的数,然后把它和left处的值交换,让它成为key
int GetMidi(int* a, int left, int right) {int mid = (left + right) / 2;if (a[left] > a[right]) //左>右{if (a[mid] > a[left])return left;if (a[right] > a[mid])return right;elsereturn mid;}else //右>左 {if (a[left] > a[mid])return left;if (a[mid] > a[right])return right;elsereturn mid;}
}
🍌小区间直接插入
对于完全二叉树而言,越往下结点数越多,递归的成本也越来越大
拿常规的快排来说(递归过程比较接近完全二叉树),递归到比较深层次时(此时区间长度相对而言比较小)我们不用快排,转而使用直接插入排序,可以降低时间成本
优化后代码如下:
void QuickSort1(int* a, int left, int right) {if (right <= left)return;if (right - left + 1 <= 10) //区间长度小于等于10时就采用直接插入排序InsertSort(a, right - left + 1); else{int key = PartSort1(a, left, right);QuickSort1(a, left, key - 1);QuickSort1(a, key + 1, right);}
}
🍌非递归快排
当递归层数过深时,就会有栈溢出的风险,此时要使用非递归快排,这种思路通过栈来实现
思路:
●把区间端点下标(左右都是闭区间)入栈,然后出栈,取到端点下标,找key
●由key可以将原区间划分为左、右两个子区间,将这两个区间的端点入栈,然后继续找key,划分区间
●重复上面的步骤,当栈为空时,排序完成
void QuickSortNonR(int* a, int left, int right) {Stack st;StackInit(&st);StackPush(&st, left); //左端点入栈StackPush(&st, right);while (!StackEmpty(&st)){int key = PartSort1(a, left, right);right = StackTop(&st); //取栈顶元素StackPop(&st); //出栈left = StackTop(&st);StackPop(&st);if (left < key - 1) //区间至少有两个元素才入栈{StackPush(&st, left);StackPush(&st, key - 1);}if (right > key + 1) //区间至少有两个元素才入栈{StackPush(&st, key + 1);StackPush(&st, right);}}
}
你会发现,虽然叫非递归,但是整个过程几乎和递归一模一样
🍉归并排序
🍌递归
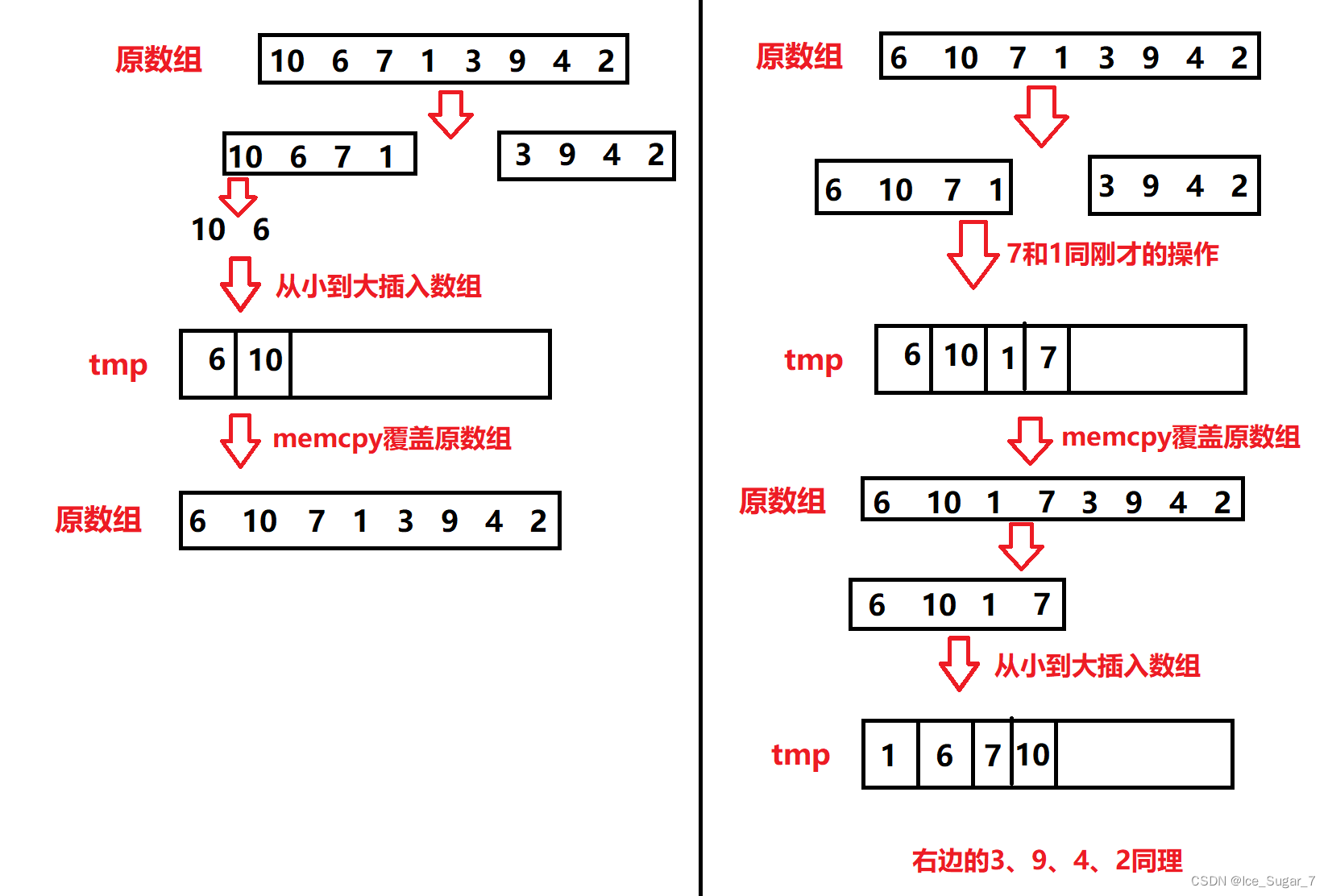
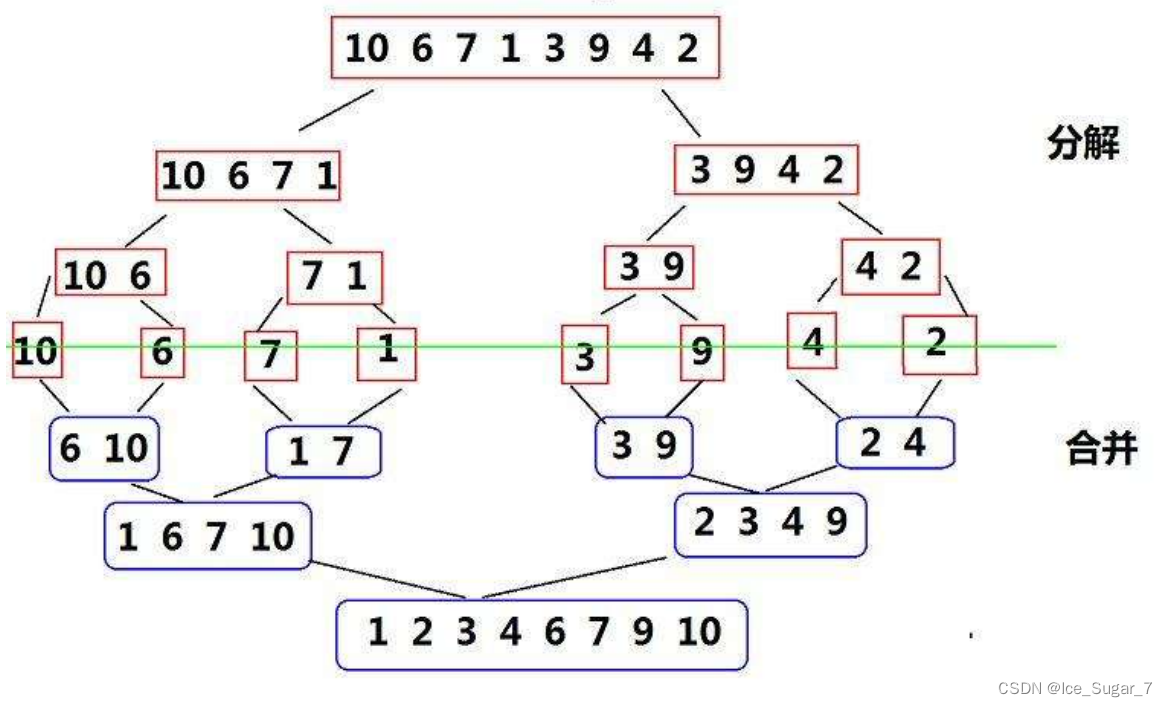
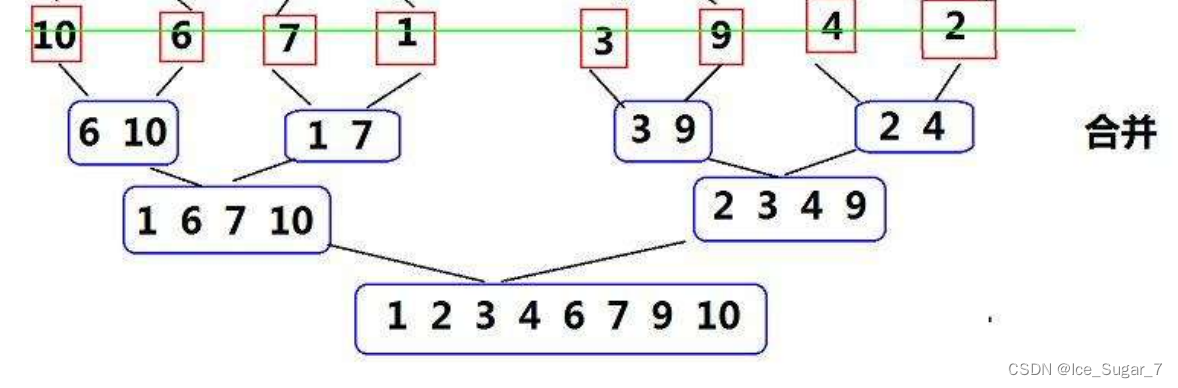
和快排差不多,也是先分割区间,不过归并排序不用找key,而是直接从中间分割
分割到有序时,将元素从小到大尾插到临时数组tmp。插好后将tmp拷贝到原数组
示意图如下:
void _MergeSort(int* a,int* tmp, int left,int right) {if (left >= right)return;int mid = (left + right) / 2;int left1 = left, right1 = mid; //左区间的左端点、右端点int left2 = mid + 1, right2 = right; //右区间的左端点、右端点_MergeSort(a, tmp, left1, right1); //左区间进行排序_MergeSort(a, tmp, left2, right2); //右区间进行排序int i = left; //控制tmp的下标//合并有序数组(归并中的“并”)while (left1 <= right1 && left2 <= right2){if (a[left1] < a[left2])tmp[i++] = a[left1++];elsetmp[i++] = a[left2++];}//确保剩下的元素都进tmpwhile (left1 <= right1){tmp[i++] = a[left1++];}while (left2 <= right2){tmp[i++] = a[left2++];}memcpy(a + left, tmp + left, sizeof(int) * (right - left + 1));
}void MergeSort(int* a,int n) {int left = 0;int right = n - 1;int mid = (left + right) / 2;int* tmp = (int*)malloc(sizeof(int) * n);_MergeSort(a, tmp,left,right);free(tmp);
}
🍌非递归
将序列中的元素先合并为两个(1,1合并),然后两个两个合并为四个(2,2合并),再合并为八个……
使用非递归的话需要注意边界,因为每次是按2的倍数进行合并的,但是数据不一定是二的倍数,所以要对右区间的长度进行判断:
●如果右区间左端点已经比n大了,那说明右区间不存在,那就不用归并
●如果只有右区间右端点越界,那就把它修改为(n-1)
最后的memcpy也要注意,因为可能越界,所以不能直接拷贝2*gap个整型大小的空间
void MergeSortNonR(int* a, int n) {int* tmp = (int*)malloc(sizeof(int) * n);int gap = 1; //每个区间的长度while (gap < n){int index = 0; //临时数组的下标for (int i = 0; i < n; i += 2 * gap) //对每一组进行归并{int left1 = i; //左区间左端点int right1 = left1 + gap - 1; //左区间右端点int left2 = left1 + gap; //右区间左端点int right2 = left1 + 2 * gap - 1; //右区间右端点if (left2 >= n) //如果右区间的左端点都超出数组范围了,说明右区间不存在break;if (right2 >= n) //如果右区间右端点越界,那就对它进行修正right2 = n - 1;//放进临时数组while (left1 <= right1 && left2 <= right2){if (a[left1] < a[left2])tmp[index++] = a[left1++];elsetmp[index++] = a[left2++];}//确保剩余元素进入数组while (left1 <= right1){tmp[index++] = a[left1++];}while (left2 <= right2){tmp[index++] = a[left2++];}memcpy(a + i, tmp + i, sizeof(int) *(right2 - i + 1));}gap *= 2;}free(tmp);
}
🍉计数排序(了解即可)
额外开一个空间tmp,并初始化为0。遍历序列,遇到某个数,就让额外空间下标对应的元素+1。其实就相当于一块计数板,记录相应的数出现的次数
这么说确实挺抽象的,举个栗子
比如6,1,7,3,9,2,4,6,从6开始遍历:
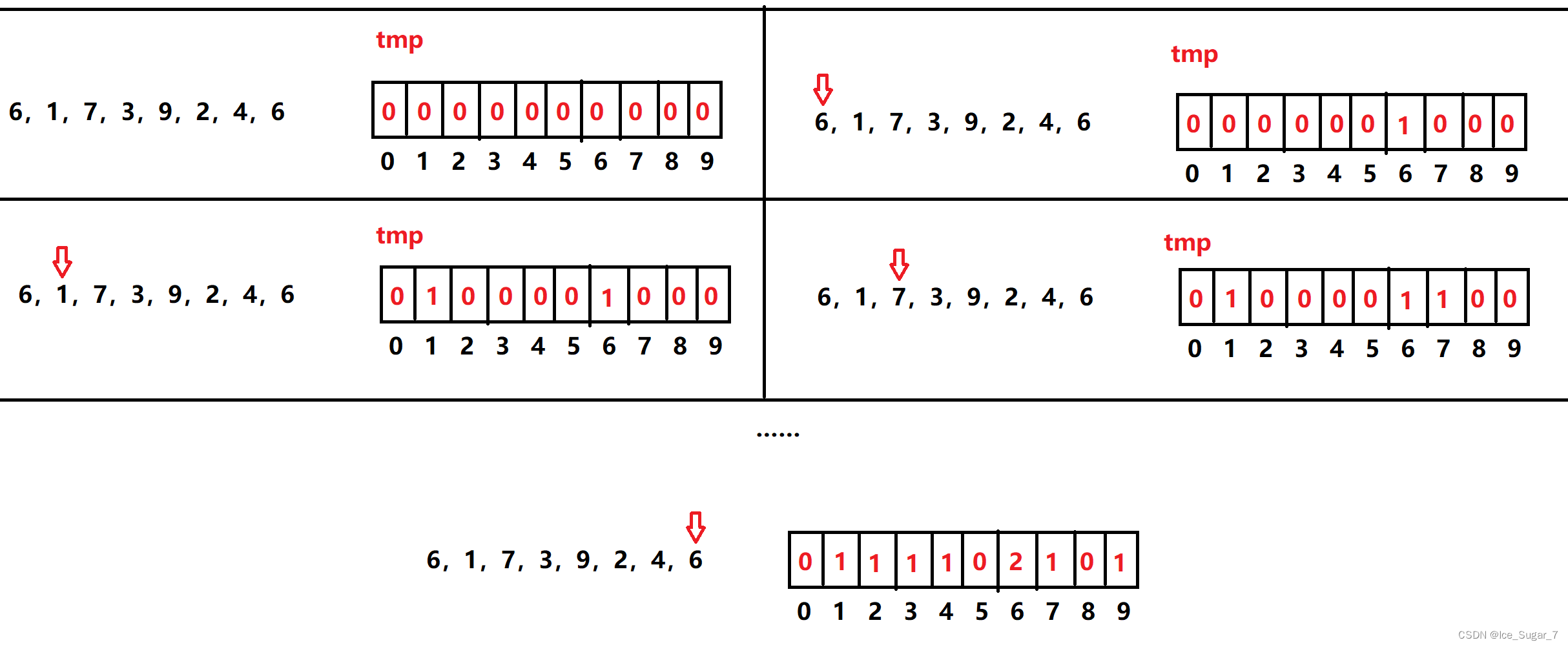
原理很简单:tmp相当于有序序列,遍历完原序列后我们遍历tmp,遇到出现次数不为0的就打印它的下标,出现几次就打印几次,也就可以打印出有序序列了
使用计数排序要先找出序列的最大值、最小值,才能确定tmp下标的范围。比如一个序列最小是100,最大是199,但是数组下标是从0开始的,直接建大小为200的tmp显然浪费空间,所以我们不一定说下标要和数对应,比如0对0,1对1这样子,我们可以0对100,1对101(这种转换数学中称为“映射”)
void CountSort(int* a, int n)
{int min = a[0], max = a[0];for (size_t i = 0; i < n; i++){if (a[i] < min)min = a[i];if (a[i] > max)max = a[i];}int range = max - min + 1;int* count = (int*)malloc(sizeof(int) * range);printf("range:%d\n", range);if (count == NULL){perror("malloc fail");return;}memset(count, 0, sizeof(int) * range);// 统计数据出现次数for (int i = 0; i < n; i++){count[a[i] - min]++;}// 排序int j = 0;for (int i = 0; i < range; i++){while (count[i]--){a[j++] = i + min;}}
}



![[office] 怎么样在excel中插入虚线圆圈 #学习方法#微信#知识分享](https://img-blog.csdnimg.cn/img_convert/fa703287f010535ff3c997dc27b8f00e.jpeg)