一、IJRR简介
The International Journal of Robotics Research(IJRR)是机器人领域的高水平学术期刊,专注于发布关于机器人技术和相关领域的最新研究成果。IJRR创刊于1982年,是该领域的第一本学术刊物,2022-2023最新影响因子9.2。自其创刊以来,IJRR一直以其卓越的学术质量和广泛的学术影响力在国际学术界内享有良好的声誉。该期刊致力于发表原创性、深入思考和引人入胜的论文、评论和社论,涵盖了机器人学科的各种主题。
二、最近3年发表IJRR数目最多的国家和地区排名
近三年,在IJRR发文量最多的国家前三名分别是美国、德国、意大利。中国大陆排在第8名。
三、最近3年发表IJRR数目最多的机构排名
近三年,在IJRR发文量最多的大学是MIT,第二多的是Stanford University。
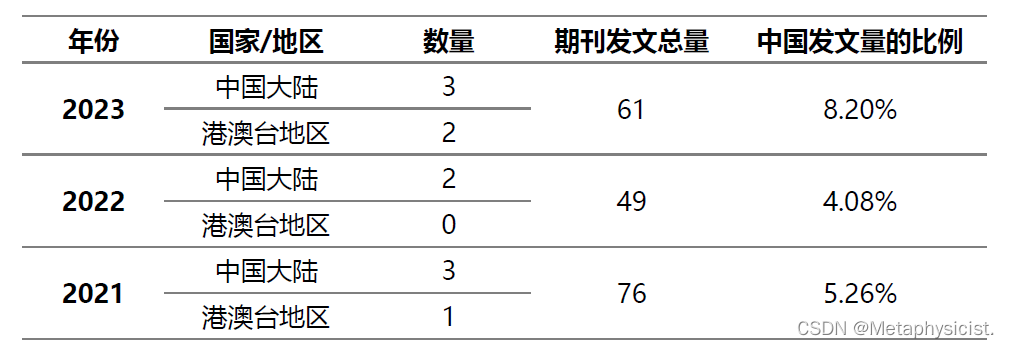
四、中国近三年发文情况总览(2021.01.01至2023.12.31)
近三年,中国大陆和港澳台在IJRR发文平均每年不超过5篇。
1.戴建生院士(南方科技大学)、Wurdemann教授(UCL)团队新作,基于李理论的柔性流体驱动机器人建模与分析
Abstract:
软体机器人与刚性连杆机器人相比,由于其固有的优越的变形性和灵活性,被广泛应用于各种应用中。然而,这些机器人很难执行需要按需刚度的任务,也就是说,在允许的变形范围内施加足够的力。此外,柔软的柔性材料还引入了大变形和不可忽略的非线性,这使得柔性机器人的刚度分析和建模从根本上具有挑战性。本文提出了一种建模框架,研究底层的刚度和不同配置下的软体机器人的等效符合性能。首先,描述了一种基于Lie理论的建模和分析方法。在这里,我们推导出两组(分段常曲率和Cosserat杆模型)的顺应性模型。此外,该方法可以容纳的非线性响应(例如,弯曲角度)导致伸长的机器人。使用此建议的方法,一般的笛卡尔刚度或符合矩阵可以推导出和用于配置相关的刚度分析。所提出的框架,然后实例化和实施流体驱动的软体机器人。所提出的方法的功效和建模精度进行了验证,使用模拟和实验。
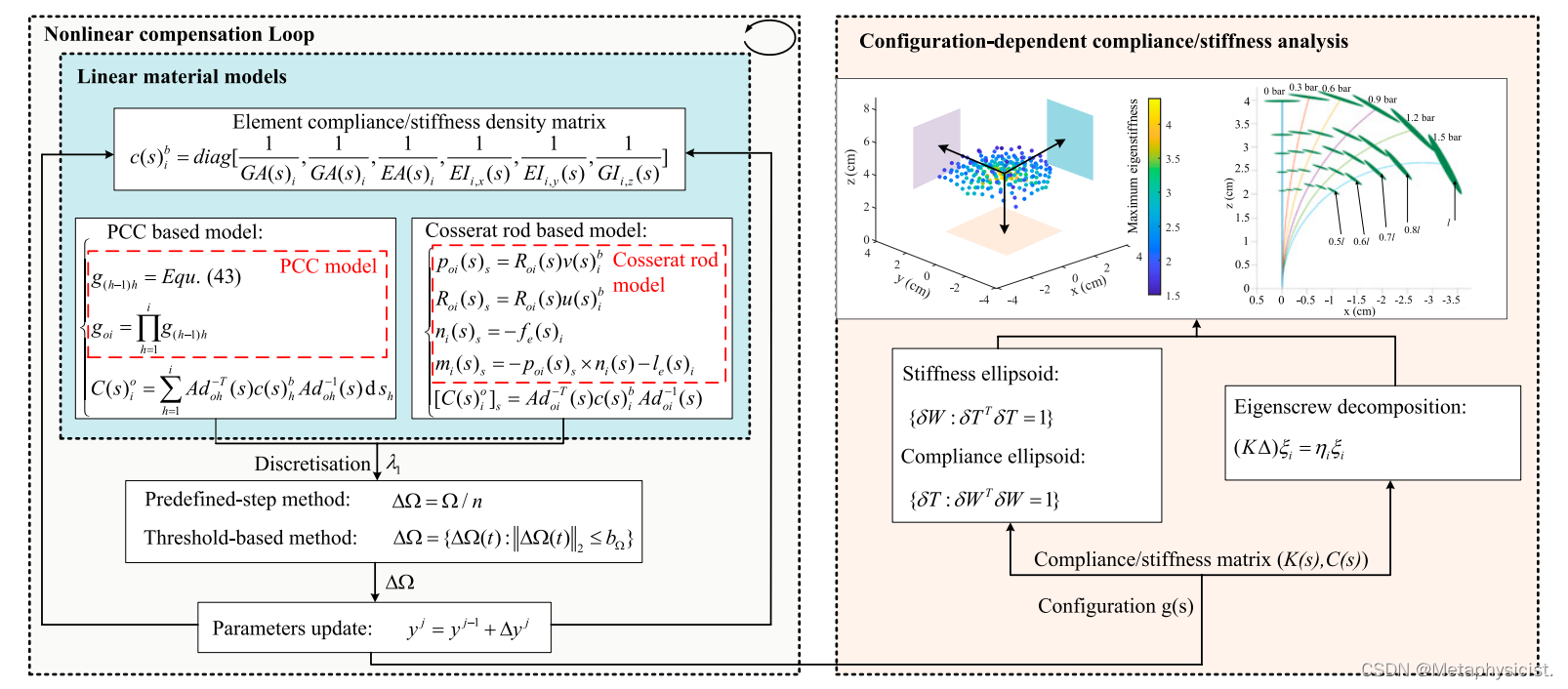
图1.提出的基于李理论的框架,包括正向运动学,刚度建模和分析。该刚度建模和分析框架适应了运动学的非线性行为,例如分段常曲率(PCC)模型和Cosserat杆模型,并实现了配置相关的刚度分析。
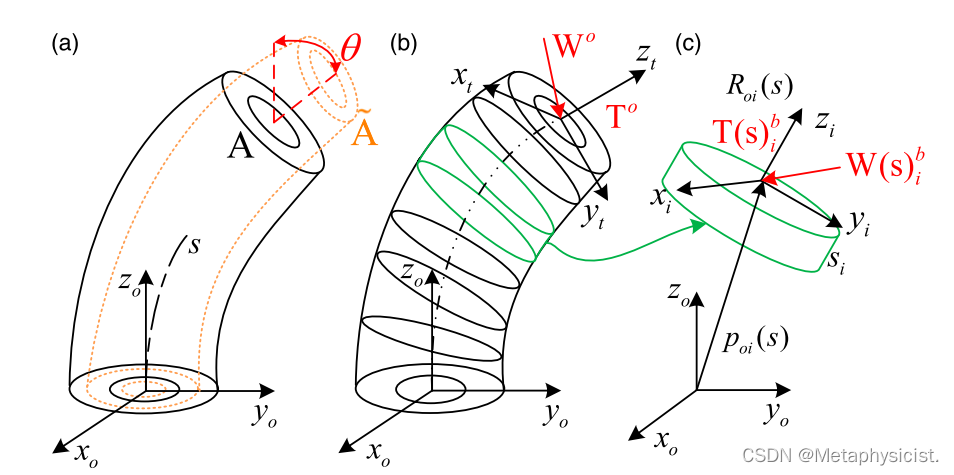
图2。弯曲角度θ的变形机器人图(截面为圆形时)。(a)在材料不可压缩性的大纵向变形下,横截面的变化不可忽略。(b)软操纵器包括串行连接的兼容元件。(c)操纵器的一个元素。
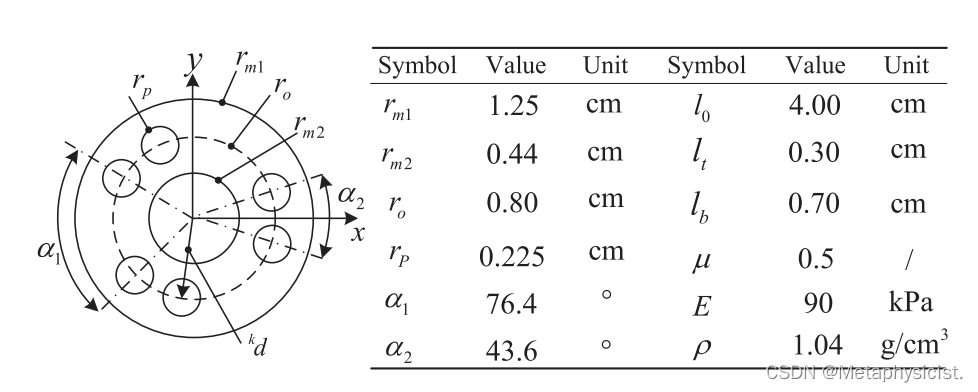
图3。软体机器人的参数。L0、lt和lb是腔室的长度,操纵器的顶部和底部盖。
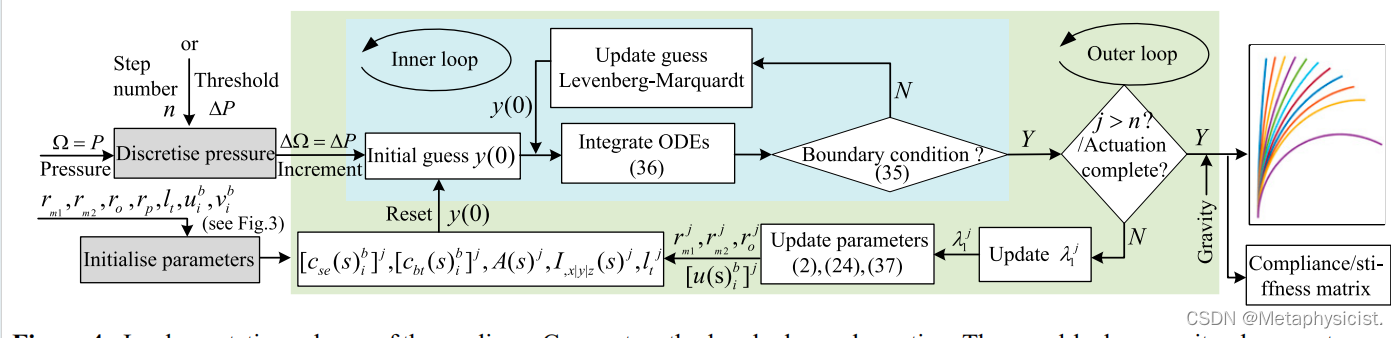
图4.大伸长条件下的非线性余弦法的实现方案。灰色的方块表示它只执行一次。内环是为了求解(36)中ode集合的边值问题。而外环是处理大伸长和更新参数产生的超弹性。对于非线性PCC模型的实现逻辑是相同的,通过用第3.3.1节中导出的PCC模型替换内环(蓝色矩形)。
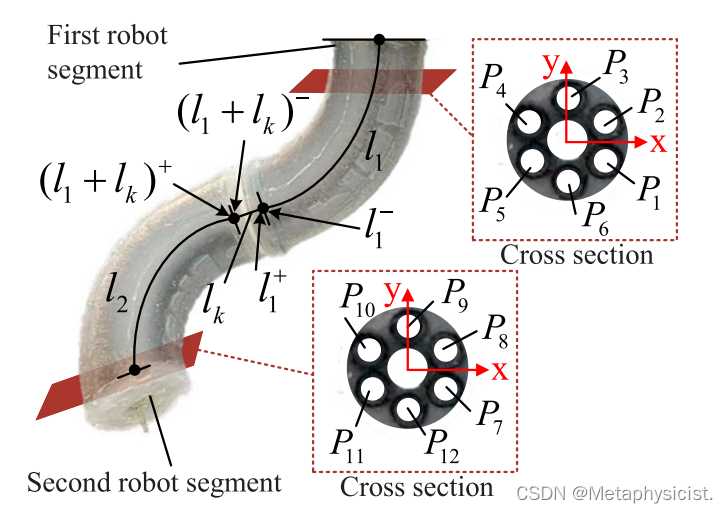
图5.串联两个连接段的机器人图示。每个线段的尺寸在图3中列出了。连接部分的长度/厚度为6 mm。第二段的腔室压力从P7到P12表示。

图6.模拟1的结果-(a)P1=P2和(b) P3 = P4 = P5 = P6时的弯曲比较。软机器人机械手在x-z平面上弯曲。
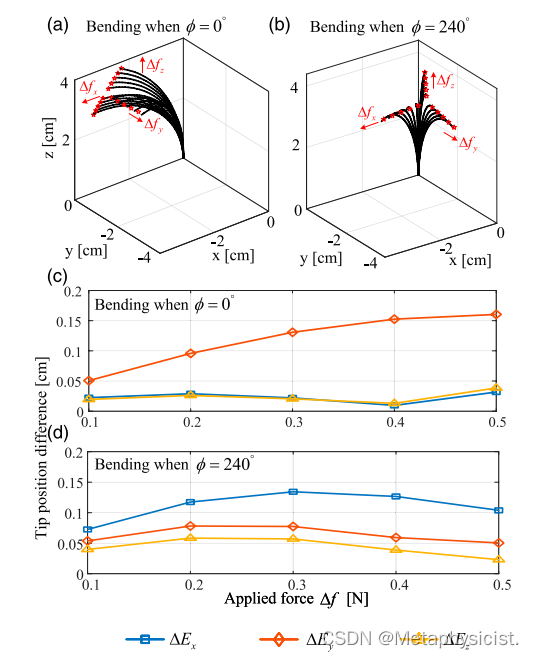
图7。模拟1的结果,显示了来自6×6笛卡尔合规矩阵的偏转,其中星号标记是从基于(19)和(36)的合规矩阵推导出的尖端位置。黑线来自于直接求解宇宙杆模型,假设在尖端施加外力Δfx|y|z。当f=0°和f=240°时的结果分别显示在(a)和(b)中。尖端位置ΔEx、ΔEy、ΔEz沿相应轴的差异如(c)和(d).所示
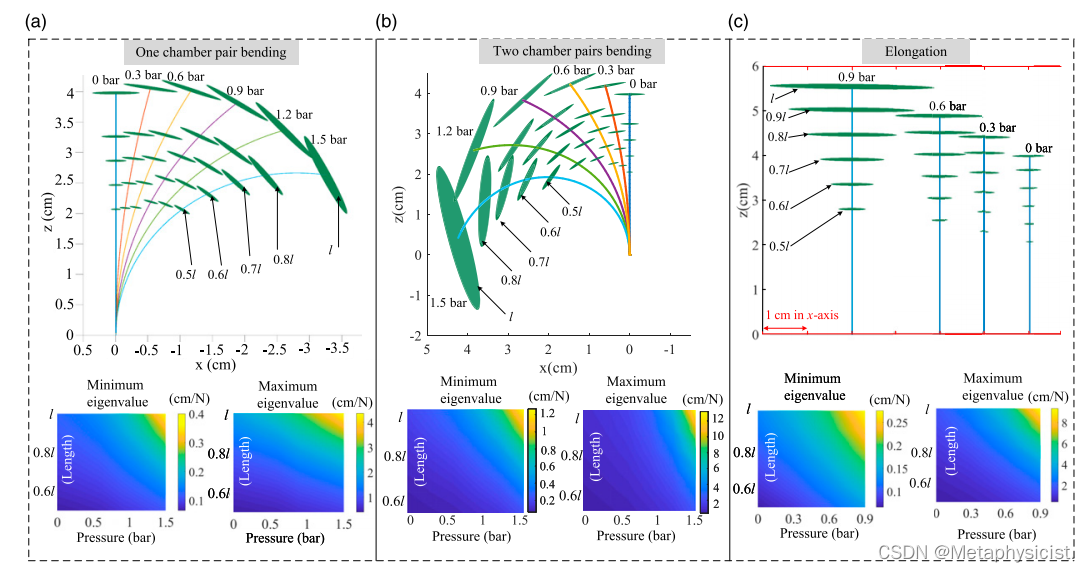
图8.仿真2的结果—关于单段机械手的不同配置的合规椭球体的可视化(比例为0.2倍)。在底部报告的合规矩阵对应的最小特征值和最大特征值。当启动(a)一个腔室对(P1 = P2)并且启动(b)两个腔室对(P3 = P4 = P5 = P6)时弯曲:当压力以0.3 bar步长从0增加到1.5 bar时,沿机械器的顺应性椭球形。(c)伸长率:当P1∼P6以0.3 bar步长从0增加到0.9 bar时,沿机械手的顺应性椭球体。

图9。当(a) P1 = P2 = P7 = P8和(b) P1 = P2 = P9 = P10 = P11 = P12时,两个机器人机器人尖端的模拟2-符合椭球体(0.1倍)的结果。压力通过0.3 bar步骤从0增加到1.2 bar。顺应性矩阵的最大特征值和最小特征值与驱动压力的大小一起报告。

图10.模拟3结果-基于特征机组分解的尖端位置刚度分析。提取最大和最小的正特征刚度值,然后使用Matlab的自然方法进行插值,以评估构型相关的刚度,在(b),(c),(d).中从左到右显示每个腔室的最大压力为1.0 bar。(a)演示。颜色条说明了附加到工作空间点上的特征刚度。(b)在x-y平面上的刚度投影。(c)在y-z平面上的刚度投影。(d)在z-x平面上的刚度投影。
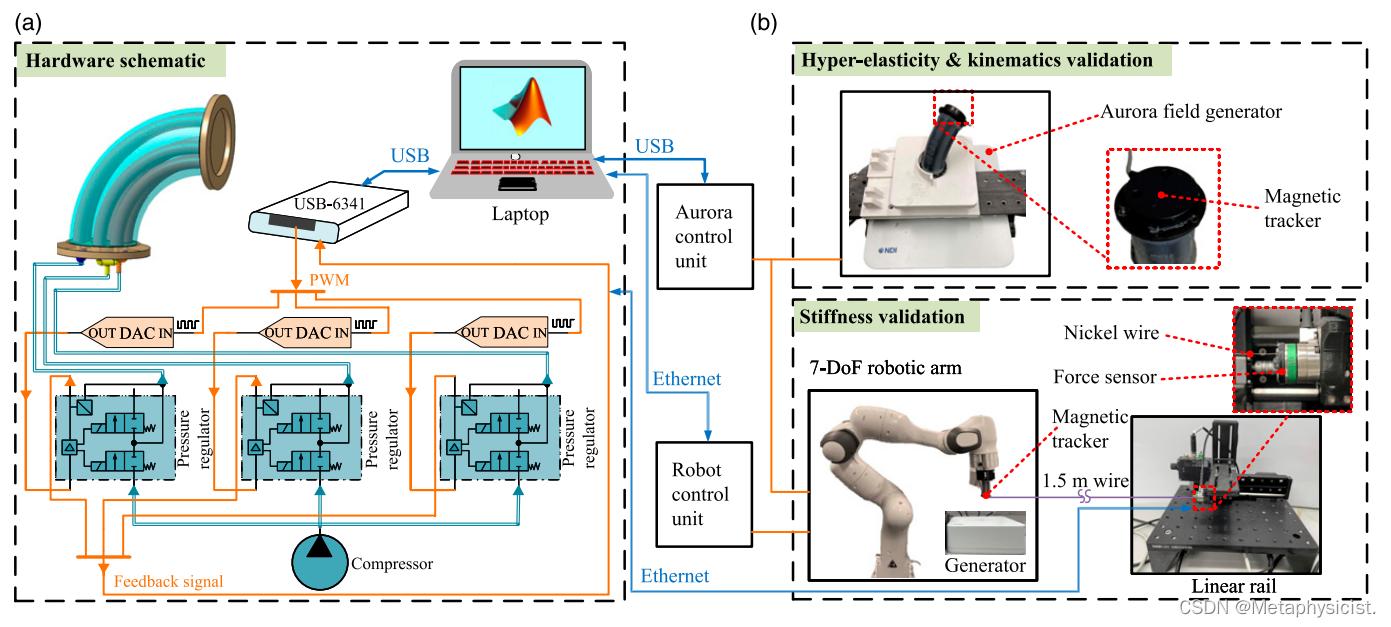
图11.实验设置。它由两个子系统组成: (a),动力和驱动的硬件主要包括空气压缩机和电子设备,如压力调节器、PWM转换器(这里表示为DAC)和NI USB-6341板,以驱动和控制软机器人操纵器。一台运行Matlab软件的笔记本电脑可以收集数据并发送控制命令。(b)前向运动学和刚度验证设置包含一个7自由度Franka埃米卡熊猫机器人,安装在末端执行器上的软机器人机械手,NDI Aurora磁跟踪器,一个6自由度力/扭矩传感器,和一个线性轨道。


图12.实验1的结果-非线性运动学响应的结果:实验与(非)线性模型的结果进行了比较。当所有腔室对被驱动时,施加的压力与(a)延伸位移和延伸比绘制,当(b)一个腔室对和(c)两个腔室对被加压时,角度和延伸比绘制。当任何非线性变得显著时,橙色的恒星表示延伸的水平。(a)报告了实验中的延伸率;(b)和(c)报告了来自NCM的比率。比较在扩展1中报告。

图13。实验1-正向运动学验证结果: (a)单对驱动,压力振幅为0.9、1.2和1.5 bar。(b)两个腔室对驱动,压力振幅分别为0.6、0.9和1.2 bar。xexp、yexp和zexp为实验位置。xsim、ysim和zsim是非线性宇宙线模型的模拟结果。LCMex、LCMey和LCMez是来自线性宇宙线模型的误差。NCMex、NCMey和NCMez是来自非线性科瑟拉特模型的误差。LPCCex、LPCCey和LPCCez是来自线性PCC模型的误差。NPCCex、NPCCey和NPCCez都是来自非线性PCC模型的误差。这些比较也在扩展1中报告。
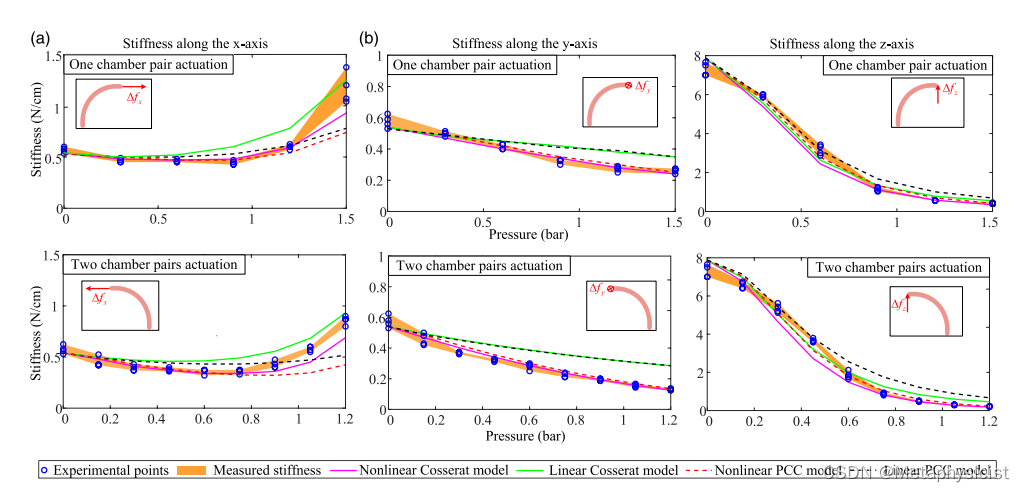 图14。实验2的结果-沿x、y和z轴的平面刚度。(a)当P1和P2被启动时,以及在0∼1.5 bar之间的刚度响应。(b)当P3、P4、P5和P6被启动时,以及在0∼1.2 bar之间时的刚度响应。实验数据点是用蓝色的圆圈绘制出来的。刚度是由测量的位移和力的数据计算出来的。橙色的阴影区域从最小刚度值延伸到最大刚度值。我们的模型的计算结果绘制成粉红色、绿色以及红色和黑色的曲线。
图14。实验2的结果-沿x、y和z轴的平面刚度。(a)当P1和P2被启动时,以及在0∼1.5 bar之间的刚度响应。(b)当P3、P4、P5和P6被启动时,以及在0∼1.2 bar之间时的刚度响应。实验数据点是用蓝色的圆圈绘制出来的。刚度是由测量的位移和力的数据计算出来的。橙色的阴影区域从最小刚度值延伸到最大刚度值。我们的模型的计算结果绘制成粉红色、绿色以及红色和黑色的曲线。
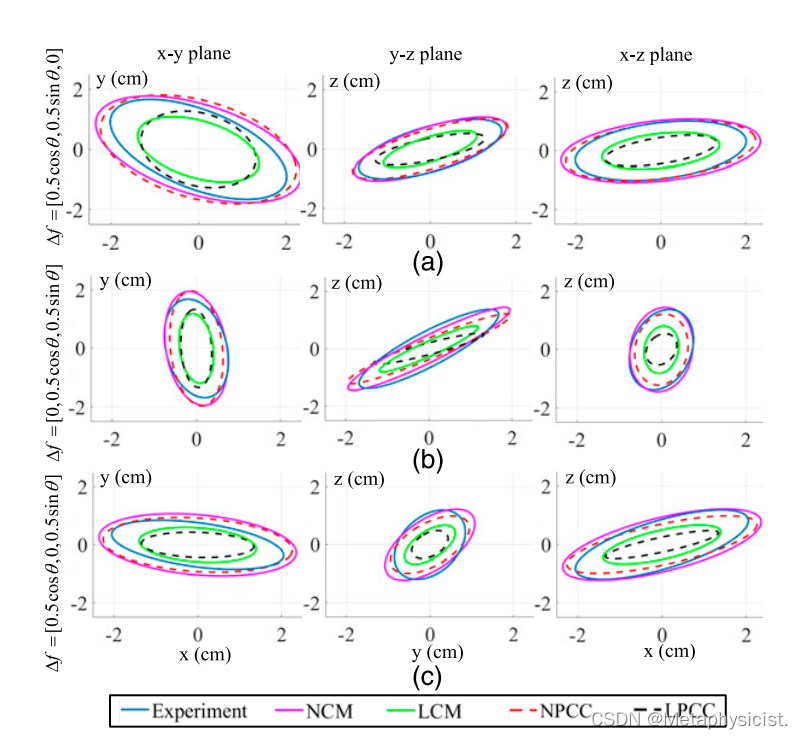
图15.实验2的结果-合规矩阵的椭球可视化。NCM、LCM、NPCC、LPCC分别表示非线性凝聚、线性凝聚、非线性PCC和线性PCC模型的模拟顺应性。
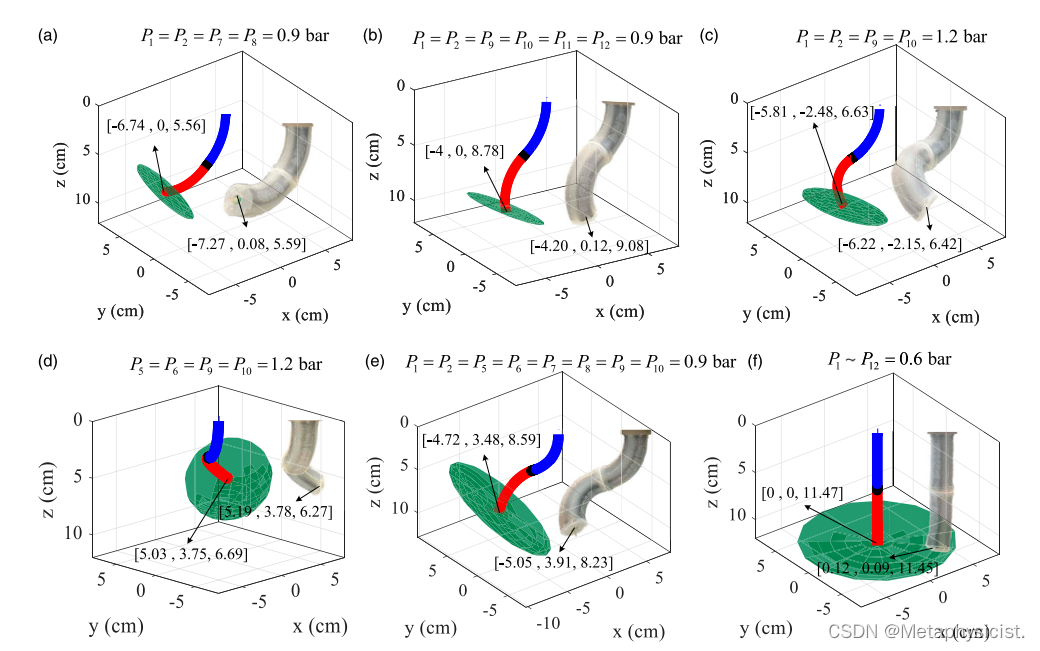
图16.实验3的结果
2.任洪亮教授(香港中文大学)、孟庆虎院士(南方科技大学)、孙立宁院士(苏州大学)团队新作,利用柔性并联内窥镜机器人开展黏膜剥离手术
Transendoscopic flexible parallel continuum robotic mechanism for bimanual endoscopic submucosal dissection
Huxin Gao1,2,3,4, Xiaoxiao Yang5 , Xiao Xiao6 , Xiaolong Zhu6 , Tao Zhang2,3, Cheng Hou7 , Huicong Liu7 , Max Q.-H. Meng2,6, Lining Sun7 , Xiuli Zuo5 , Yanqing Li5 and Hongliang Ren1,2,3,4
1 The Department of Electronic Engineering, The Chinese University of Hong Kong (CUHK), Hong Kong, China
2 The Department of Biomedical Engineering, National University of Singapore, Singapore
3 Shun Hing Institute of Advanced Engineering (SHIAE), The Chinese University of Hong Kong (CUHK), Hong Kong, China
4 NUS (Suzhou) Research Institute (NUSRI), Suzhou, China
5 The Department of Gastroenterology, Qilu Hospital of Shandong University, Jinan, China
6 The Department of Electronic and Electrical Engineering, Southern University of Science and Technology, Shenzhen, China
7 School of Mechanical and Electric Engineering, Soochow University, Suzhou, China
Abstract:
在内窥镜粘膜下剥离术 (ESD) 中,胃肠道 (GI) 需要手术器械穿过长、窄且曲折的内窥镜。 这对开发尺寸小、灵活性高、远端灵活性高的 ESD 器械提出了巨大的挑战。 在这项工作中,我们提出了第一个经内窥镜柔性平行连续机器人机构来开发微型灵巧柔性刚性平衡手腕(FPCW)。 此外,它还可以操纵直径2.5毫米至3.5毫米的多功能器械,包括电刀、注射针和镊子。 我们的 FPCW 仪器适用于市售双通道内窥镜(直径:<12 毫米,通道宽度:2.8 毫米至 3.8 毫米左右)。 此外,我们还开发了一种手术远程机器人系统,称为 DREAMS(微创手术双臂机器人内窥镜助手),通过使用我们最小的 FPCW 仪器进行手术双手 ESD 程序。 首先,我们进行了一系列实验来确定 FPCW 的设计和运动学参数并验证 FPCW 仪器原型的机械性能,包括工作空间、刚度、力量和遥操作准确性。 其次,我们通过离体测试验证 FPCW 仪器的功能通过对猪胃进行 ESD 步骤。 最后,我们对活体猪模型进行了体内测试并展示了这一点我们开发的 DREAMS 可以直观地进行远程操作,以平均解剖方式有效地执行双手 ESD在胃体大弯处的速度为108.95 mm²/min,这表明我们的DREAMS具有令人满意的机动性和准确性,比同行的机器人系统更具竞争力。
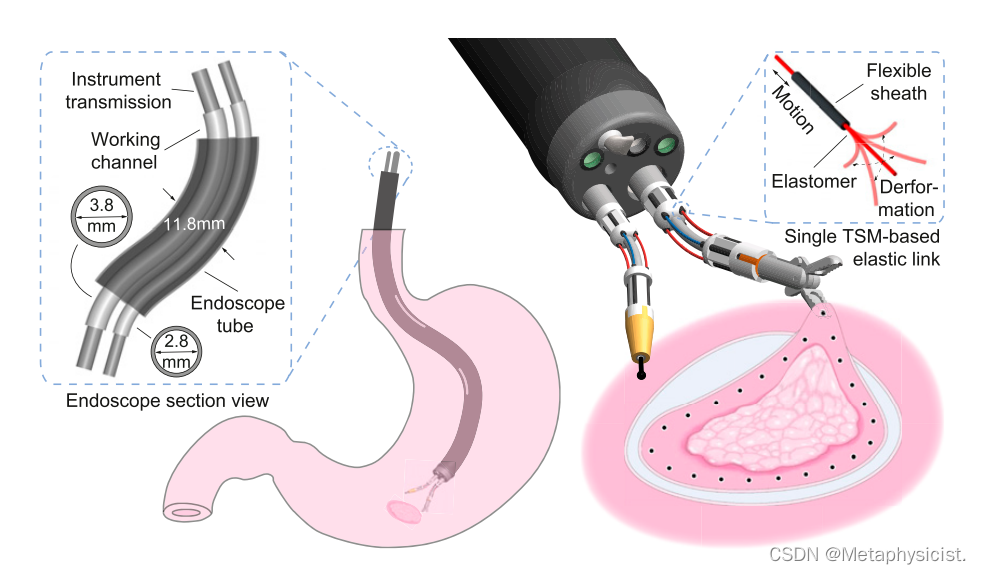
图1.使用已开发的经内镜FPCW仪器的ESD程序。左图:双FPCW仪器通过虚线框中所示的狭窄曲折的内镜工作通道。右图:双FPCW仪器正在进行ESD测试。在内镜下,左右器械分别进行抓取和解剖。右虚线框为基于腱鞘机构的单弹性链。
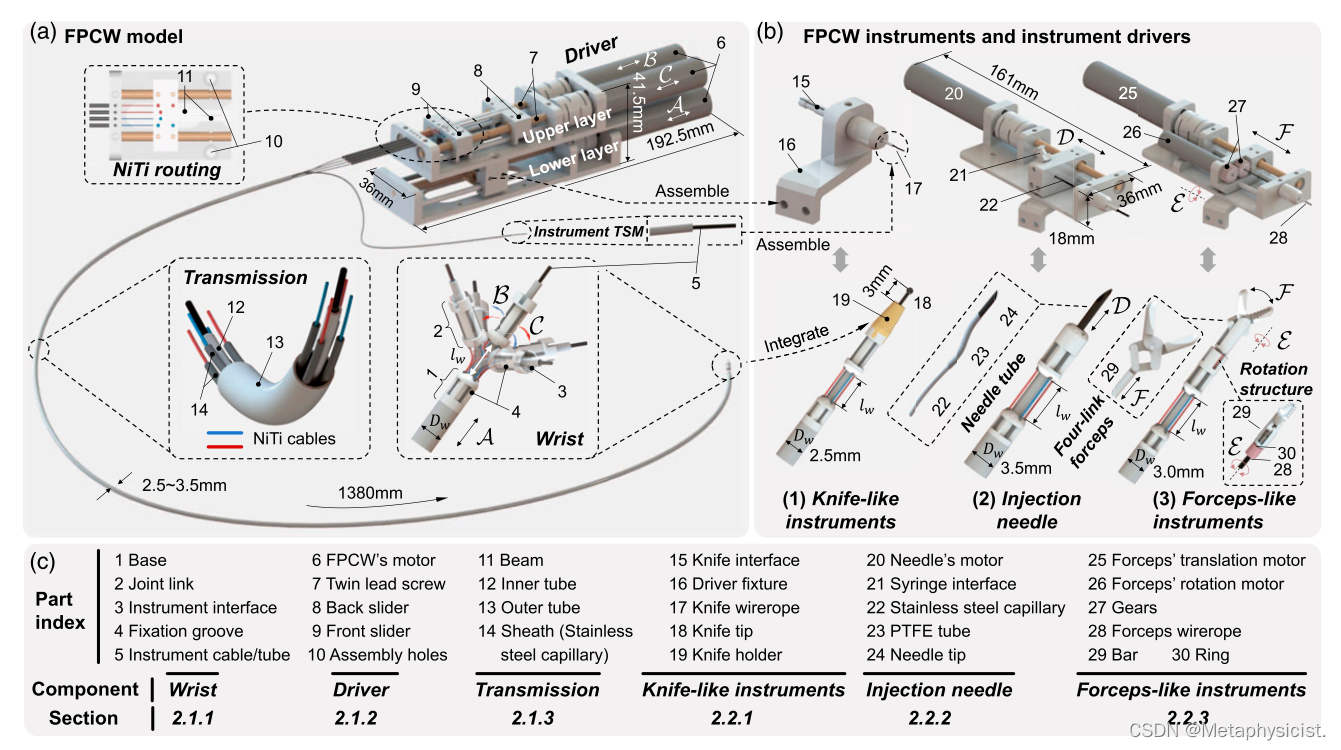
图2。FPCW子系统。(a)FPCW的三维模型。变速箱、手腕、NiTi路由和仪器TSM都显示在放大盒中。FPCW的运动也被演示了:翻译A和两个弯曲的B & C. (b) FPCW仪器和仪器驱动器。每根柱都是一对近端-远端FPCW仪器。左:FPCW电手术刀,中间:FPCW注射针,右:FPCW钳。上排:仪表驱动器,下排:FPCW仪表。使用FPCW系统的装配细节(以电外科刀为例)通过虚线箭头来说明。注射针(针管)和镊子(四连杆和旋转结构)的内部细节。(c)零件索引表。每一列代表FPCW子系统的一个组件,并对应于一个内容部分。
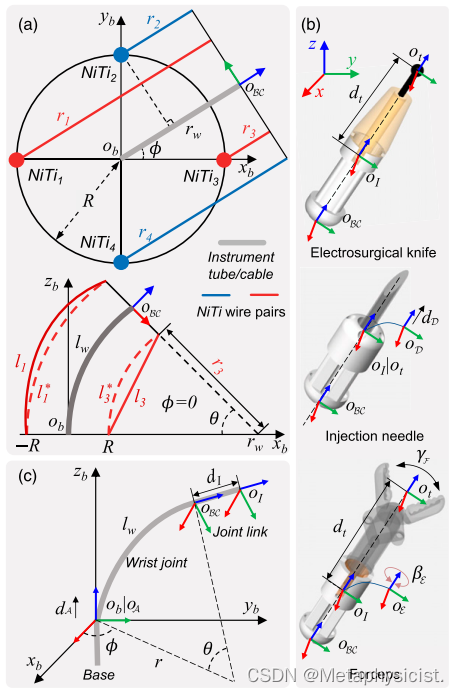
图3。运动学建模。(a)从驱动空间到配置空间的说明。向上是在手腕的基面上具有曲率半径的俯视图。底部是当f = 0时的前视图。(b)配置空间到手腕空间的说明。3自由度FPCW的帧变换。(c)三种仪器的运动学说明。从上到下,电手术刀,注射针和镊子。
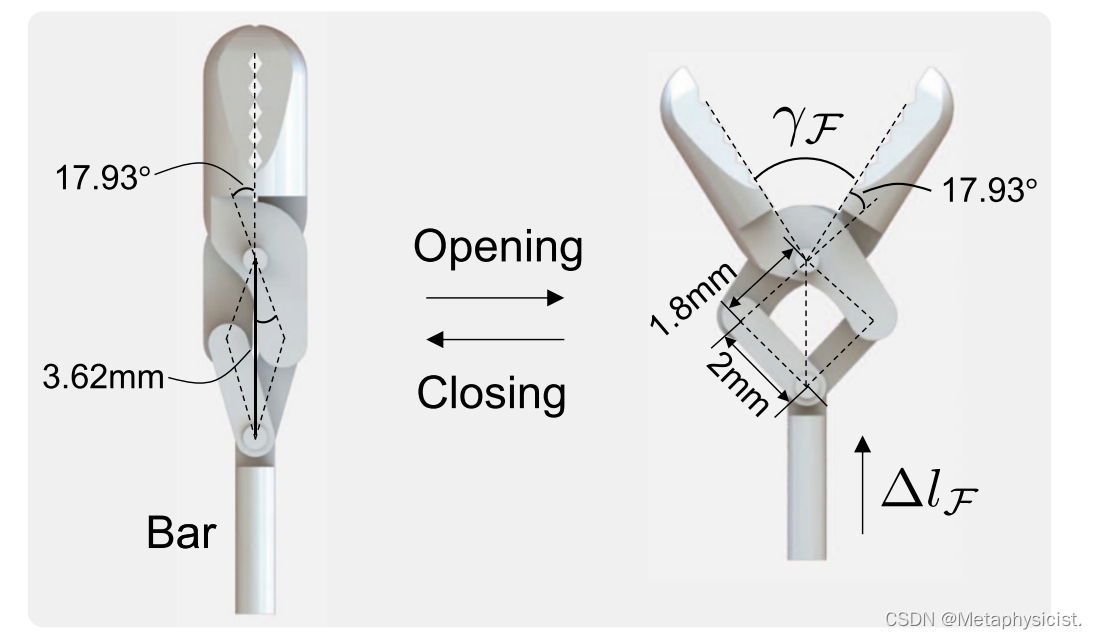
图4.4链结构闭钳。左:初始位置。右:打开后的位置。

图5。手眼校准。(a)内窥镜盖的前视图。(b)两个内窥镜工作通道的平面的剖面视图。

图6。系统的概述。(a)基于FPCW仪器的手术远程机器人系统(梦)示意图。绿色、蓝色和橙色的盒子分别表示病人推车中的外科医生控制台、电子设备和执行器。(b)远程操作原理图。两只主手在内窥镜内远程操作两个FPCW仪器。机器人校准用红色标出。这些方框图总结了控制系统的主要组成部分和它们之间的数据流。带有帽子的参数表示所需的值。
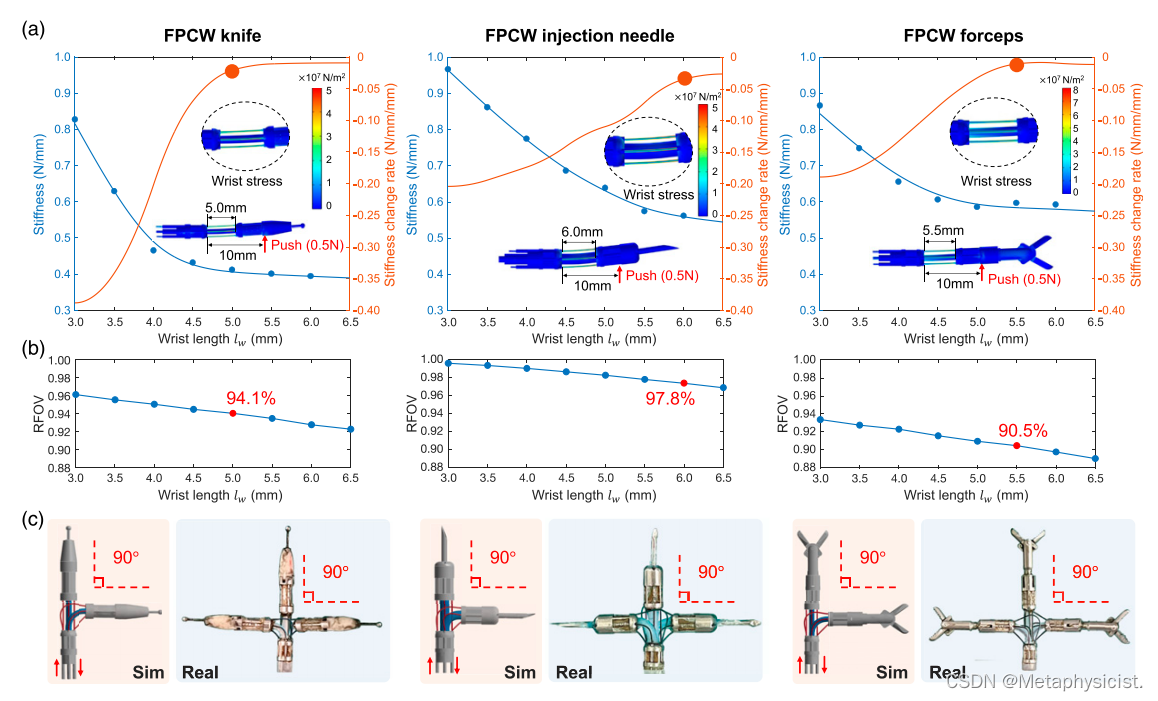
图7。FPCW仪器的参数标识。(a)对相对于增量腕关节长度的刚度的有限元模拟。FPCW器械选择手腕长度的完整应力分布(橙色点:FPCW刀、注射针和镊子分别为5.0 mm、6.0 mm和5.5mm)。都显示在相应的绘图中。应力主要集中在NiTi线上,而不是刚性部分,如图放大图所示。(b) RFOVof FPCW仪器相对于增量的手腕长度。对最大弯曲角度的(c)有限元模拟和真实实验。

图8.显示FPCW仪器与内镜摄像机之间关系的参数的校准。校准方法为远程操作。灰色背景为内窥镜视图。(a)初始深度的校准。水平虚线是所需的深度。(b)扭转角的校准,αl,αr。垂直的虚线是所需的弯曲方向。

图9。在内窥镜下的FOV中,可到达的工作空间。中心垂直截面边界用虚线绘制。在工作空间内绘制了FPCW仪器和内镜下远端帽的模型。(a) FPCW刀(通过右侧通道)和镊子(通过左侧通道)。(b) FPCW针(通过左通道)。粉红色和蓝色分别表示没有和有针突出的工作空间

图10。刚度测试。(a)实验性设置。推力沿正z轴。(b)力与位移的结果与95%的置信区间评估超过12次尝试。接触点被标记在FPCW模型上。(b1)FPCW刀。(b2)FPCW注射针头。(b3)FPCW钳。
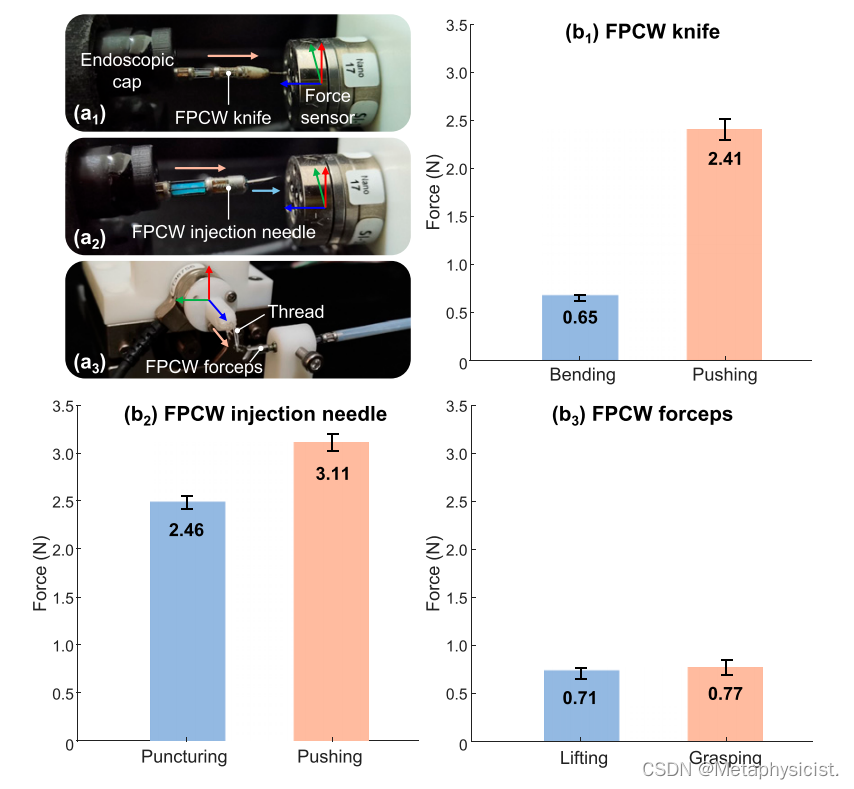
图11。工作强度测试。(a)实验性设置。所施加的力用与相应结果条相同颜色的箭头标记。(b) Force的结果与95%的置信区间评估了超过20次尝试。(b1)FPCW刀。(b2)FPCW注射针头。(b3)FPCW钳。
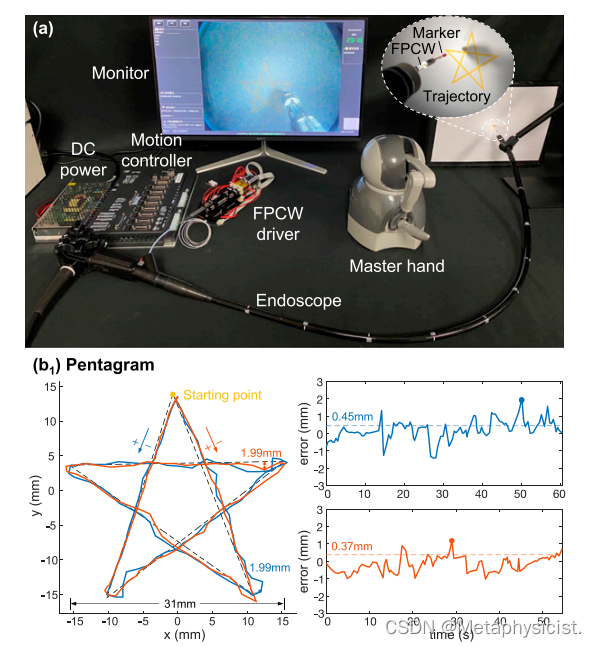

图12。远程操作测试。(a)实验性设置。(b)轨迹后。(b1)五角星;(b2)无穷大;(b3)加成一个圆。在每一个图中,左边是轨迹图;右边是下面的误差。起点用黄色的点标记。蓝色和红色的箭头表示向前和向后移动的方向。移动方向的左右两侧分别被定义为正运动和负运动。平均误差和最大误差分别用虚线和点标记。
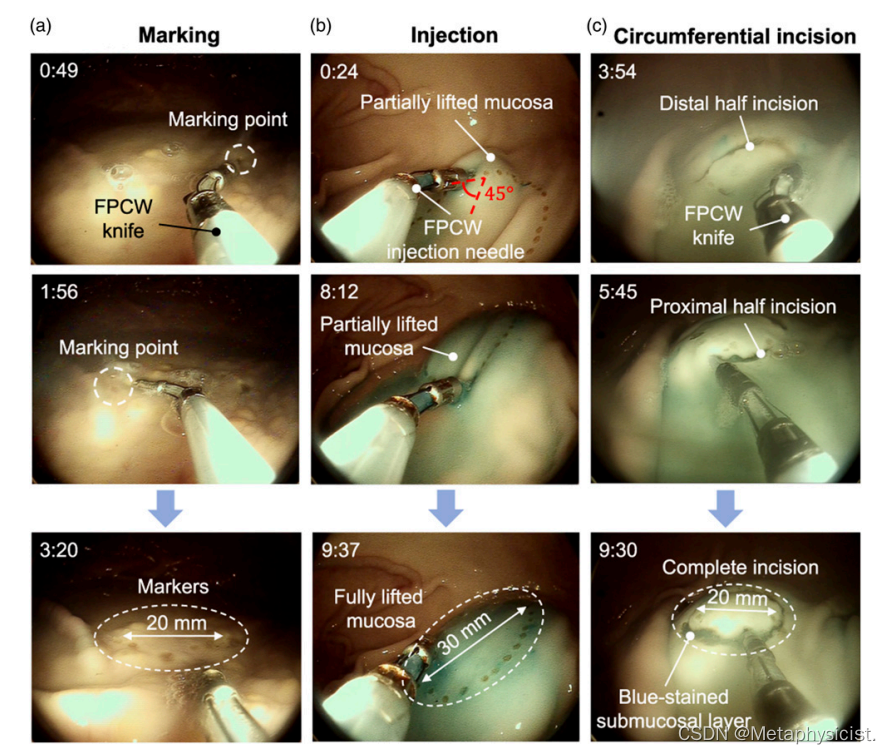
图13。体外试验。(a)标记。(b)注入。(c)环形切口。对于每个ESD步骤,前两个内镜图像显示ESD作用,第三个是结果。帧时间(分钟:秒)标记在左上角。
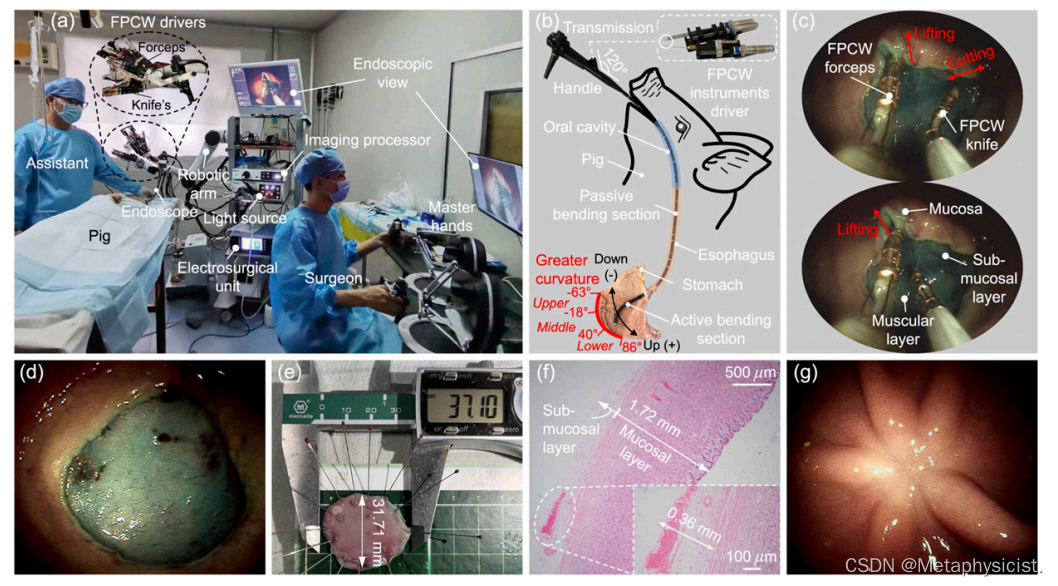
图14。胃体中较低GC的体内试验。(a) 手术环境。外科医生远程操作FPCW仪器在活体猪模型上进行双手胃ESD。详细的FPCW驱动程序如放大图所示。(b) 仿真使用离体胃并基于猪消化系统的解剖结构的2D内窥镜配置。红色曲线是GC在胃体中,长度相等地分为三个部分(上部、中部和下部)。只有大手轮用于向上(朝向下部GC)和向下(朝向上部GC)运动。模拟上、中、下内窥镜弯曲范围GC切片分别为[63°,18°),[18°,40°),[40°,86°]。(c) 内窥镜图像。双FPCW仪器正在执行内镜下黏膜下剥离术。红色箭头表示FPCW仪器的运动方向。(d) 解剖平面。(e) 已重新接种ESD样品。(f) ESD标本的组织病理学图片(染色材料:苏木精和伊红染色,扩增×40和×200)。原始图和放大图的比例尺分别为500μm和100μm。(g) 术后30天疤痕在内窥镜图像中。
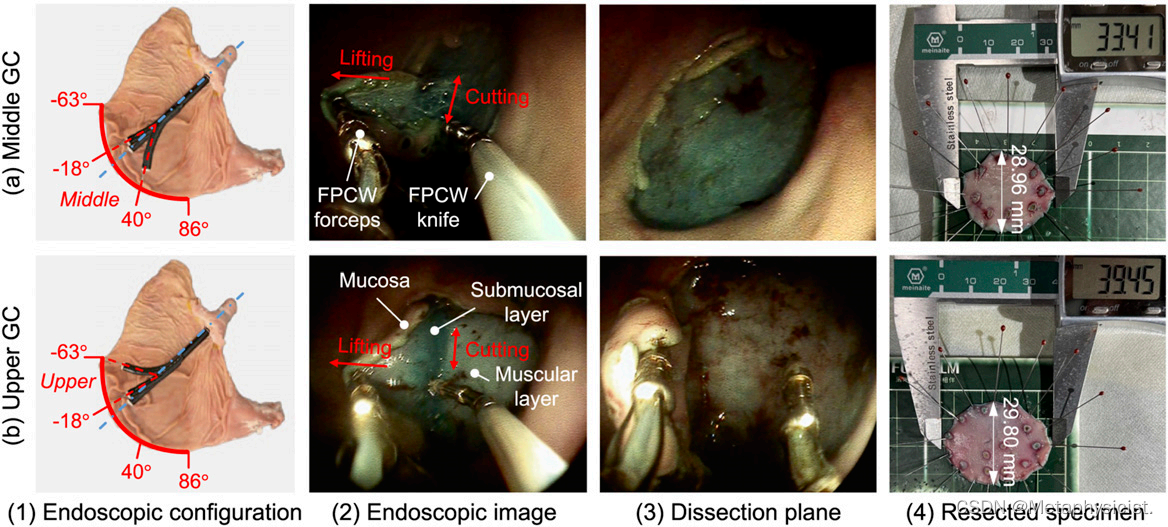
图15。在胃体不同位置的大曲率(GC)处的体内试验。(a)中间GC(靠近后壁)部分。(b)上GC(靠近眼底)部分。从左到右的图像:(1)内窥镜结构(蓝色虚线为大工作通道的初始中心线),(2)内窥镜图像,(3)解剖平面和(4)切除的ESD标本。
Reference
[1] Shi, J., Shariati, A., Abad, S. A., Liu, Y., Dai, J. S., & Wurdemann, H. A. (2024). Stiffness modelling and analysis of soft fluidic-driven robots using Lie theory. The International Journal of Robotics Research, 43(3), 354-384.
[2] Gao, H., Yang, X., Xiao, X., Zhu, X., Zhang, T., Hou, C., ... & Ren, H. (2024). Transendoscopic flexible parallel continuum robotic mechanism for bimanual endoscopic submucosal dissection. The International Journal of Robotics Research, 43(3), 281-304.