YOLOv8太卷啦 | YOLOv8官方仓库正式支持RT-DETR训练、测试以及推理
RT-DETR由百度开发,是一款端到端目标检测器,在保持高精度的同时提供实时性能。它利用ViT的强大特性,通过解耦尺度内交互和跨尺度融合来有效处理多尺度特征。
RT-DETR具有很强的适应性,支持使用不同的解码器层灵活调整推理速度,而无需重新训练。该模型在具有TensorRT的CUDA等加速后端方面表现出色,优于许多其他实时目标检测器。
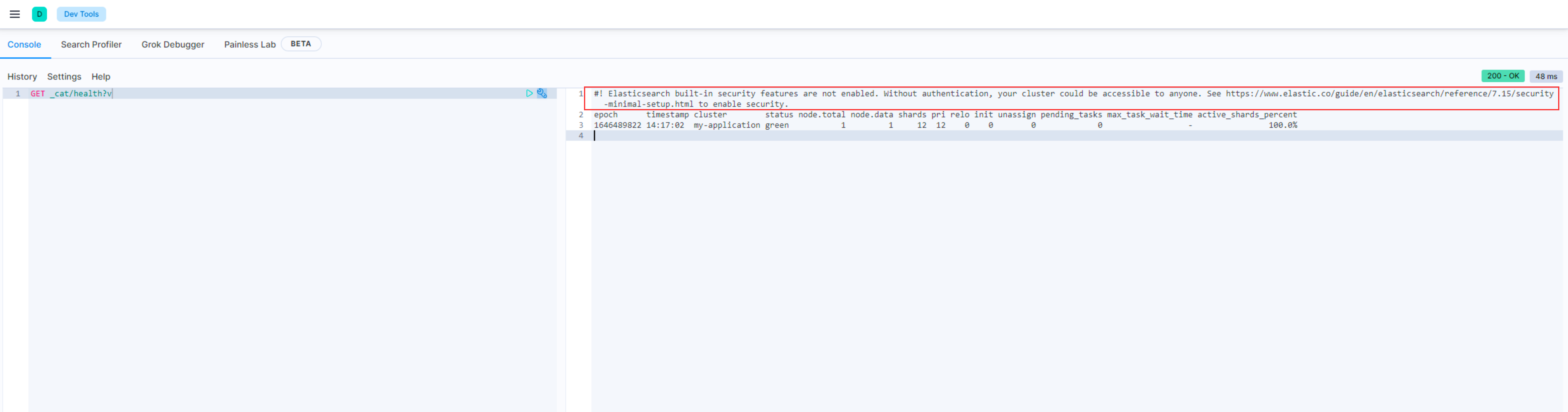
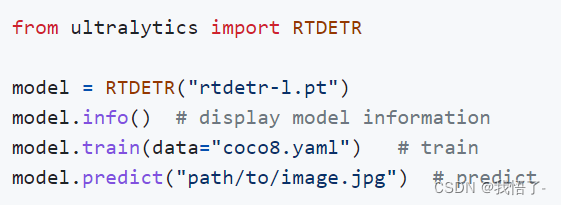
1. 使用方法
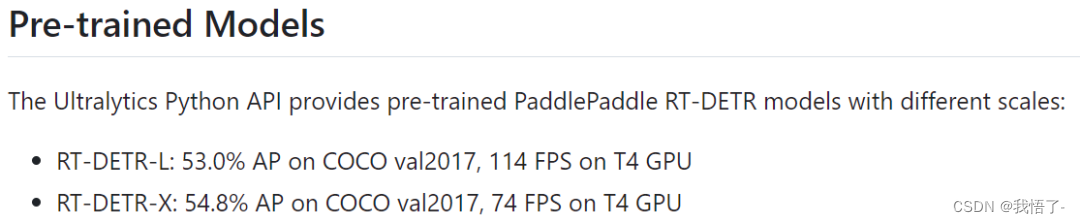
2. YOLOv8中RT-DETR精度
3. RT-DETR-L的YAML
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'# [depth, width, max_channels]l: [1.00, 1.00, 1024]backbone:# [from, repeats, module, args]- [-1, 1, HGStem, [32, 48]] # 0-P2/4- [-1, 6, HGBlock, [48, 128, 3]] # stage 1- [-1, 1, DWConv, [128, 3, 2, 1, False]] # 2-P3/8- [-1, 6, HGBlock, [96, 512, 3]] # stage 2- [-1, 1, DWConv, [512, 3, 2, 1, False]] # 4-P3/16- [-1, 6, HGBlock, [192, 1024, 5, True, False]] # cm, c2, k, light, shortcut- [-1, 6, HGBlock, [192, 1024, 5, True, True]]- [-1, 6, HGBlock, [192, 1024, 5, True, True]] # stage 3- [-1, 1, DWConv, [1024, 3, 2, 1, False]] # 8-P4/32- [-1, 6, HGBlock, [384, 2048, 5, True, False]] # stage 4head:- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 10 input_proj.2- [-1, 1, AIFI, [1024, 8]]- [-1, 1, Conv, [256, 1, 1]] # 12, Y5, lateral_convs.0- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [7, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14 input_proj.1- [[-2, -1], 1, Concat, [1]]- [-1, 3, RepC3, [256]] # 16, fpn_blocks.0- [-1, 1, Conv, [256, 1, 1]] # 17, Y4, lateral_convs.1- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 19 input_proj.0- [[-2, -1], 1, Concat, [1]] # cat backbone P4- [-1, 3, RepC3, [256]] # X3 (21), fpn_blocks.1- [-1, 1, Conv, [256, 3, 2]] # 22, downsample_convs.0- [[-1, 17], 1, Concat, [1]] # cat Y4- [-1, 3, RepC3, [256]] # F4 (24), pan_blocks.0- [-1, 1, Conv, [256, 3, 2]] # 25, downsample_convs.1- [[-1, 12], 1, Concat, [1]] # cat Y5- [-1, 3, RepC3, [256]] # F5 (27), pan_blocks.1- [[21, 24, 27], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
4. 方法概述
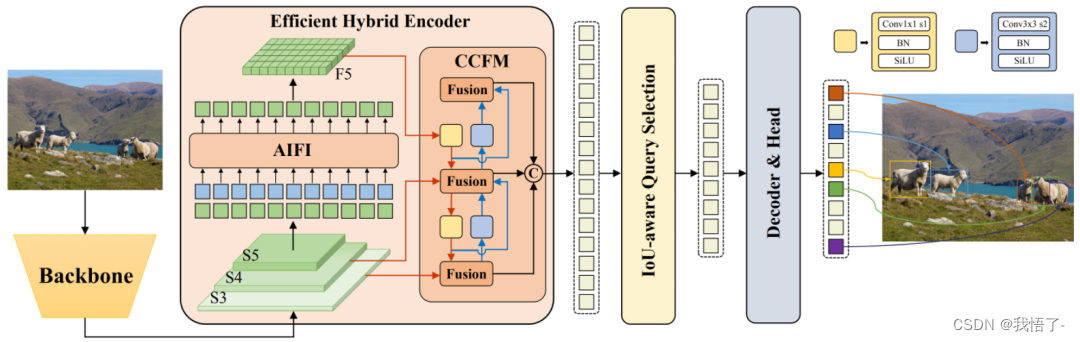
百度RT-DETR概述。RT-DETR模型架构图显示骨干{S3、S4、S5}的最后三个阶段作为编码器的输入。高效的混合编码器通过尺度内特征交互(AIFI)和跨尺度特征融合模块(CCFM)将多尺度特征转换为图像特征序列。IoU感知查询选择用于选择固定数量的图像特征以用作解码器的初始对象查询。最后,具有辅助预测头的解码器迭代地优化对象查询,以生成框和置信度分数(源)。
主要特点:
(1)高效混合编码器:RT-DETR使用了一种高效的混合编码器,通过解耦尺度内交互和跨尺度融合来处理多尺度特征。这种独特的基于视觉Transformer的设计降低了计算成本,并允许实时物体检测。
(2)IoU感知查询选择:RT-DETR通过利用IoU感知的查询选择改进了目标查询初始化。这使得模型能够聚焦于场景中最相关的目标,从而提高了检测精度。
(3)自适应推理速度:RT-DETR支持通过使用不同的解码器层来灵活调整推理速度,而无需重新训练。这种适应性便于在各种实时目标检测场景中的实际应用。