SharpContour: A Contour-based Boundary Refinement Approach for Efficient and Accurate Instance Segmentation
论文链接:[2203.13312] SharpContour: A Contour-based Boundary Refinement Approach for Efficient and Accurate Instance Segmentation (arxiv.org)
代码链接:无
1. 背景和动机
实例分割是计算机视觉中的一个重要任务,它旨在识别并分割图像中的每个目标实例。近年来,基于深度学习的实例分割方法取得了显著的进展,但是在边界区域的分割质量仍然不尽如人意,导致实例分割的准确性和鲁棒性受到限制。
为了提高边界区域的分割质量,近些年出现了一些边界细化的方案,本文指出一个好的边界细化方案应该需要满足以下三个基本要求:准确、高效以及通用。
然而目前效果最好的方案均无法同时满足以上三个要求:
-
准确、通用但不高效
-
[2104.05239] Look Closer to Segment Better: Boundary Patch Refinement for Instance Segmentation (arxiv.org):BPR需要基于实例分割模型输出的Mask的边缘去提取大量Patch,并独立对各个Patch进行计算,这会带来比较大的计算成本。
-
[1912.02801] PolyTransform: Deep Polygon Transformer for Instance Segmentation (arxiv.org):PolyTransform提出了第一个基于contour的边缘优化方案,它使用mask-based模型输出的Mask生成初始的contour,然后再通过Transformer网络对Contour进行Refine,Transformer网络会带来较大的计算量。
-
-
准确、高效但不通用(大都仅能对一些mask-based模型的输出进行Refine,无法应用于contour-based模型)
- [1912.08193] PointRend: Image Segmentation as Rendering (arxiv.org):PointRend仅在一些模糊边界点上进行分割,从而降低了计算量。
- [2104.08569] RefineMask: Towards High-Quality Instance Segmentation with Fine-Grained Features (arxiv.org):在上采样阶段通过引入细粒度的特征来进行整个目标的Refine。
-
高效、通用但不准确
- 一些Regression-based contour evolution方案,例如Dance、DeepSnake等,虽然高效,但其对于角落、尖端等区域分割精度依然不佳。本文指出,这些基于回归的模型之所以效果不佳的原因在于:他们的回归方法需要平衡回归误差和当前轮廓的平滑度,并且在特征学习过程中相互高度依赖,这使得这些方案对于角落等尖端区域分割结果过于光滑。
由于Contour-Based方案天然具有高效和通用性,并且易于用于mask-based方案后(从Mask中提取Contour是很直接的)。因此,本文基于Contour提出了一种新的BoundaryRefine方案,名为SharpContour,其同时具有准确、高效以及通用的优点。SharpContour将一个Coarse Contour作为输入,并独立地对各个顶点进行变形,以达到Refine的效果。
- 为了避免由于“独立性”而带来的artifacts,本文限制了每个顶点的移动方向——法线方向,同时以循环的方式进行迭代,使得整个优化过程更加稳定。
- 为了平衡高效性和准确性,本文不是直接对顶点的offset进行回归,而是对一些离散的点进行分类,来决定最终的目标位置。具体的:
- 在移动方向上采样一些点,并将这些点进行分类,分为inner和outer两类,以此来获取其flipping position(顶点在沿着移动方向移动到某个位置后状态发生反转的位置,具体见后文说明),用于确定边界。
- 这里的分类器担任一个至关重要的角色,因此,本文进行了特殊设计——Instance-aware Point Classifier (IPC):
- IPC可以根据不同的InstanceBoundary去预测一个顶点的inner或outer的状态,并以一个概率分数的形式来表示
- 为了提高准确性,IPC需要具有以下两个重要特征:
- Instance Aware:对于同一点来说,针对不同的InstanceBoundary,其可能是具有不同的状态,因此,IPC需要对Instance有所感知,本文是通过基于各个实例动态生成IPC参数的方式来实现的。
- Boundary Details:IPC需要能够捕获Boundary Details,因此,IPC的输入特征来自于高分辨率的细粒度特征。
- 基于IPC的输出,便可以确定在优化过程中如何移动各个顶点:
- 移动距离:通过目标的尺寸(可以根据CoarseMask大致确定)以及IPC输出的概率分数来共同决定。
- 移动方向:按照前文所说,是通过inner、outer状态来确定。
2. 具体方案
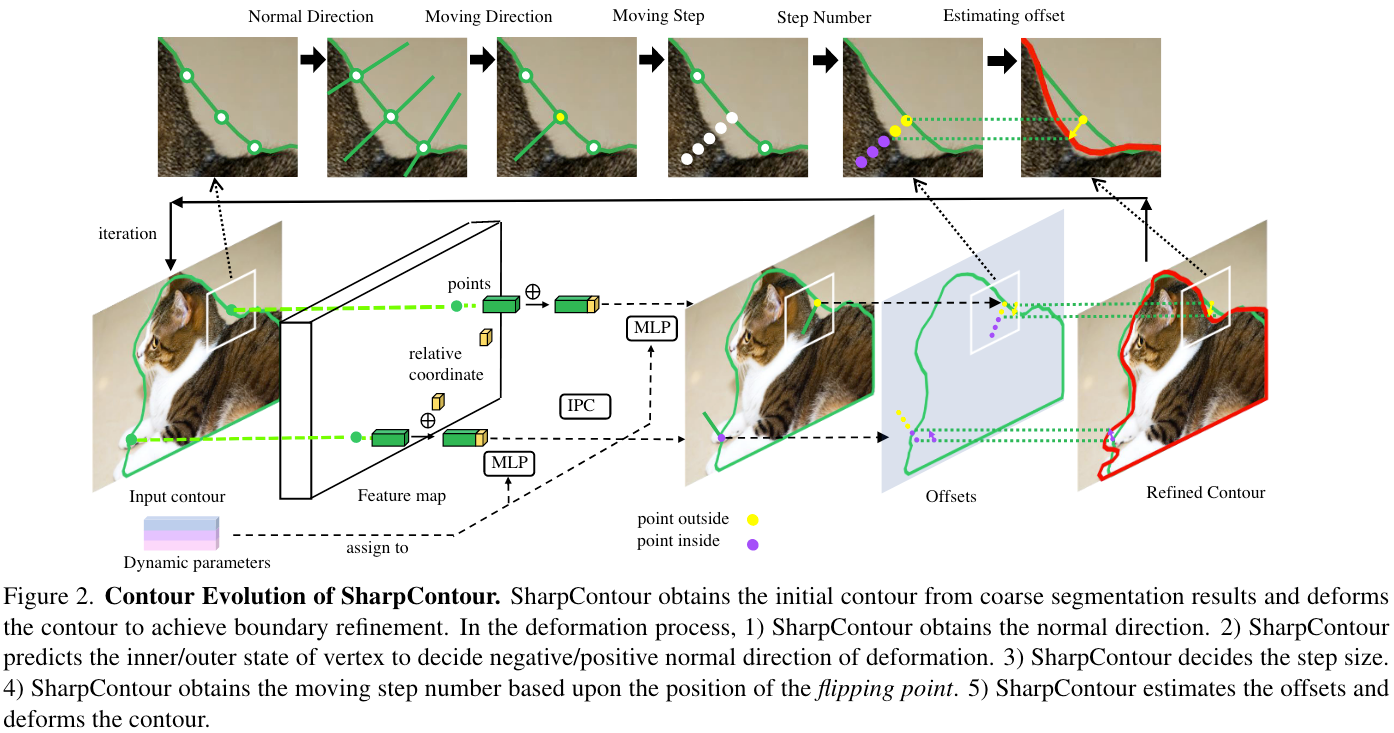
2.1 Contour Evolution
对于一个远离边缘的顶点 x i x_i xi来说,在Evolution过程中的一次迭代可以表达为:
x i ′ = x i + m s i d i x_i^{\prime}=x_i+m s_i d_i xi′=xi+msidi
其中, d i d_i di表示移动方向, s i s_i si表示移动步长, m m m则是步数。
- 移动方向
对于每一个顶点 x i x_i xi,IPC φ ( x i ) \varphi\left(x_i\right) φ(xi)会输出一个范围为 [ 0 , 1 ] [0,1] [0,1]的标量,用于指示该顶点是位于outside(例如 φ ( x i ) = 1 \varphi\left(x_i\right)=1 φ(xi)=1)还是inside(例如 φ ( x i ) = 0 \varphi\left(x_i\right)=0 φ(xi)=0),如果 φ ( x i ) = 0.5 \varphi\left(x_i\right)=0.5 φ(xi)=0.5 则说明IPC不确定这个点是outside还是inside,则说明该点可能位于Boundary上。关于IPC的具体细节,在2.2节详述。
- 移动步长
移动步长的确定来自于两个方面:object size(BBox的面积,记为 A A A)以及IPC对于该顶点的不确定程度。当Object比较大的时候,步长应该也大一点,而如果IPC对于该订单的不确定性比较高,那么步长应该小一点。
具体而言,步长 s i s_i si定义如下:
s i = λ A ∣ φ ( x i ) − 0.5 ∣ s_i=\lambda \sqrt{A}\left|\varphi\left(x_i\right)-0.5\right| si=λA∣φ(xi)−0.5∣
其中 λ \lambda λ是一个经验系数,实验中设定为0.003, ∣ φ ( x i ) − 0.5 ∣ \left|\varphi\left(x_i\right)-0.5\right| ∣φ(xi)−0.5∣ 则衡量的是IPC对于 x i x_i xi的不确定性。
- 步数
理想中,希望顶点会渐进地移向准确的目标边界,因此,本文会沿着移动方向step-by-step地移动顶点,并且在每次移动后都重新使用IPC去检验该顶点的新状态。
当某次移动后,该顶点的状态发生了反转,那么本文将这个顶点所在的位置定义为flipping point,从原位置移动到该flipping point所需要的移动次数即为移动步数 m m m。为了避免顶点朝着一个不合适的方向移动太远,本文还为移动步数 m m m设定了一个上限 M M M。
Iteratively Evolution
对于一个初始的Contour C ( 0 ) : { x i ∣ i = 1 , … , N } C^{(0)}: {\left\{x_i \mid i=1, \ldots, N\right\}} C(0):{xi∣i=1,…,N},会首先进行一次上述的迭代过程以获得一个更新后的Contour C ( 1 ) C^{(1)} C(1)。然后本文会继续迭代进行另一轮迭代,得到新的Contour C ( 2 ) C^{(2)} C(2),最终经过多轮迭代后,得到一系列Contour { C ( 0 ) , C ( 1 ) , … , C ( n ) , … } \left\{C^{(0)}, C^{(1)}, \ldots, C^{(n)}, \ldots\right\} {C(0),C(1),…,C(n),…}。
需要注意的是,在某轮迭代中,一旦某个顶点到达了flipping point,这意味着该顶点到达了边界,此时其不再参与后续迭代,这提升了SharpContour的效率。
2.2 Instance-aware Point Classifier
Instance-aware Point Classifier (IPC) φ \varphi φ 作用是:给定一个顶点 x i x_i xi,预测其状态,用于指示其对于准确的目标边界的相对位置。
IPC:
-
输入: x i x_i xi的细粒度特征及其对于对应BBox的相对位置
-
输出: x i x_i xi位于目标外部或内部的概率
-
参数:IPC的参数会根据每个实例动态预测,使得IPC Instance-Aware。
Fine-grained Feature
为了使得IPC可以区分细节,本文将来自于Instance Segmentation Backbone的高分辨率的细粒度特征作为IPC的输入。为了降低计算量,同时进一步对特征进行降维、编码,还会使用一个卷积层对细粒度特征进行进一步处理。记顶点 x i x_i xi对应的编码后的特征为 f i f_i fi。
为了提升IPC对于位置的感知能力,本文还会将 x i x_i xi相对于其Instance BBox的位置坐标 c i c_i ci作为额外特征,与 f i f_i fi拼接起来,得到一个新的细粒度并且具有位置感知能力的特征向量 f i c = [ f i ; c i ] f_i^c=\left[f_i ; c_i\right] fic=[fi;ci]。 f i c f_i^c fic即为IPC的输入。
Instance-aware Dynamic Parameters
正如前文所说,IPC需要具有实例感知的能力,因为对于不同实例来说,同一个点的状态可能是不一样的。
受启发于[2003.05664] Conditional Convolutions for Instance Segmentation (arxiv.org),本文会根据每个实例的特征动态预测每个实例的IPC φ \varphi φ的参数 θ \theta θ。
例如对于Mask R-CNN来说,本文参考CondInst设计了一个Boundary Controller Head用于为每个实例动态获取其参数。
Boundary Controller Head是一个非常紧凑和轻量级的网络,具有三个全连接层,其最终输出维度与IPC参数数目相同,通过共享Mask R-CNN Mask Head的特征,IPC所需要的额外计算量很少。最终IPC可以被写为以下式子:
φ ( x i ) = φ θ ( [ f i , c i ] ) \varphi\left(x_i\right)=\varphi_\theta\left(\left[f_i, c_i\right]\right) φ(xi)=φθ([fi,ci])
IPC输出的含义:
-
φ ( x i ) > 0.5 \varphi\left(x_i\right)>0.5 φ(xi)>0.5: x i x_i xi被认为是位于目标外侧,则预测label y ^ i = 1 \hat{y}_i=1 y^i=1
-
φ ( x i ) < = 0.5 \varphi\left(x_i\right)<=0.5 φ(xi)<=0.5: x i x_i xi被认为是位于目标内侧,则预测label y ^ i = 0 \hat{y}_i=0 y^i=0
IPC的实现比较简单, 由三个带有ReLU激活函数的MLP构成,最后接一个Sigmoid函数用于输出概率。
PS. 我理解的是:Boundary Controller Head的三个全连接层各自输出IPC中的三个MLP的参数,以实现动态参数。由于没有源码不确定具体方式。
2.3 Training Strategy and Loss Function
Training Strategy
-
训练阶段:SharpContour通过随机抽取真实实例边界附近的像素来训练BoundaryControllerHead,以生成IPC的参数。
-
推理阶段:SharpContour 从粗分割结果中得到初始轮廓,然后进行Contour Evolution Process,以迭代完成Refine操作。
Loss Function
SharpContour使用FocalLoss去训练BoundaryControllerHead(用于生成IPC三个MLP的参数)以及编码细粒度特征的一层Conv。
由于训练时,positive和negative points之间的比例是不一定的,因此,这里添加了一个额外的动态系数 α \alpha α进行平衡, α \alpha α是当前batch采样点中positive和negative points之间的比例。
最终IPC训练Loss Function如下:
L I P C = { − α ( 1 − y ^ i ) γ log ( y ^ i ) , y i = 1 − ( 1 − α ) ( y ^ i ) γ log ( 1 − y ^ i ) , y i = 0 L_{I P C}=\left\{\begin{array}{r} -\alpha\left(1-\hat{y}_i\right)^\gamma \log \left(\hat{y}_i\right), y_i=1 \\ -(1-\alpha)\left(\hat{y}_i\right)^\gamma \log \left(1-\hat{y}_i\right), y_i=0 \end{array}\right. LIPC={−α(1−y^i)γlog(y^i),yi=1−(1−α)(y^i)γlog(1−y^i),yi=0
其中 y ^ \hat{y} y^为预测的label, γ \gamma γ为FocalLoss中的difficulty factor,本文在实验中设置为2。
再结合上Instance Segmentation Model进行联合训练,整体Loss如下:
L = L s + μ L I P C L=L_{s}+\mu L_{IPC} L=Ls+μLIPC
其中 L s L_s Ls是原Instance Segmentation Model的Loss, μ \mu μ在实验中被设置为10。
3.实验结果
3.1 Comparisons with the state-of-the-art
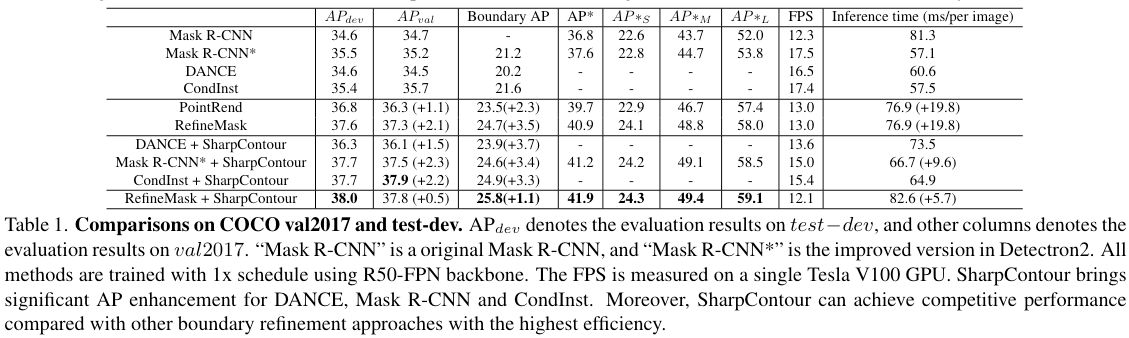

从实验结果来看,SharpContour策略效果还是不错的,整体增加的overhead也比较小。
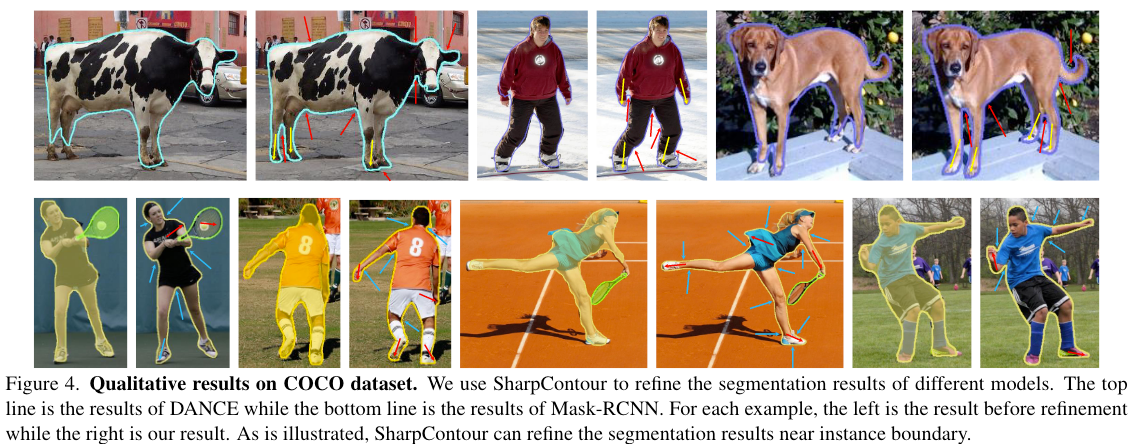
Qualitative Comparison

3.2 Ablation Study
Training Schema

Training Alone表示固定InstanceSegmentationModel的参数,仅训练BoundaryControllerHead和Encoding Feature的Conv Layer,而Joint Training代表还同时训练InstanceSegmentationModel。
可以看出,联合训练的效果明显更好。
Effects of dynamic step size

动态步长效果更好,并且训练更稳定。
Regression-based Baselines

相较于使用离散的分类策略,本文也尝试了两种回归方案:
- Reg.1:回归offset vectors
- Reg.2:回归沿着法线方向的distance
可以看出,SharpContour这种离散分类的方案效果明显更好。










![微信小程序新版头像昵称API [保存用户头像到服务器]](https://img-blog.csdnimg.cn/fa6e190af2de4b7b8f56f4bf18f8544f.png)


