PID 算法可以用于温度控制、水位控制、飞行姿态控制等领域。
后面我们通过PID 控制电机进行说明。
自动控制系统
在直流有刷电机的基础驱动中,如果电机负载不变,我们只要设置固定的占空比(电压),电机的速度就会稳定在目标范围。然而,在实际的应用中,负载可能会发生变化,此时如果还是输出固定的电压,电机的速度就偏离目标范围了,为了解决这个问题,我们需要引入自动控制系统中的闭环控制。接下来我们开始学习自动控制系统的内容。
概念:用自动控制装置,对关键参数进行自动控制,使它在受到外界干扰而偏离正常状态时,能够被自动地调节回到目标范围内。应用场景:电水壶保温系统 、大棚温控系统、水位控制系统,等等。分类:自动控制系统分为开环控制系统和闭环控制系统 。
① 开环控制系统
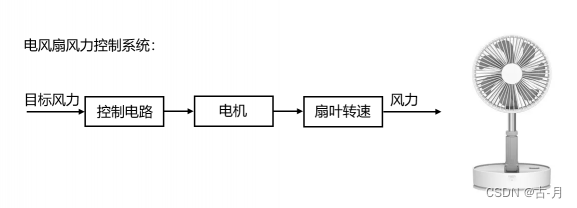
在开环控制系统中,系统输出只受输入的控制,没有反馈回路,控制精度和抑制干扰的特性都比较差。电风扇风力控制系统就是一个开环控制的系统,我们设置好目标风力之后,控制电路就输出相应的电压(假设是电压控制),此时电机的扇叶转速就被控制在目标范围了。
理想状态下,风扇的输出风力确实可以稳定在目标值附近,然而,在实际的使用中,电机会逐渐老化,扇叶上的灰尘也会让负载增大,此时我们所设定目标风力和实际风力可能就存在偏差了。
②闭环控制系统
在闭环控制系统中,引入了反馈回路,利用输出(实际值)和输入(目标值)的偏差,对系统进行控制,避免偏离预定目标。
大棚温控系统就是一个闭环控制的系统,我们设置好目标温度之后,温度传感器会采集棚内的实际温度,然后将
目标温度和实际温度进行偏差的计算,计算后的结果输入到控制电路中,控制电路进一步控制温控设备进行升温和降温,此时棚内的实际温度就被控制在目标范围了。当实际温度因外部影响偏离目标值时,温度传感器(反馈电路)就能及时的反馈偏差,让系统自动调节温控设备,使得实际温度逐渐回到目标范围。

PID 算法
PID 算法是闭环控制系统中常用的算法,
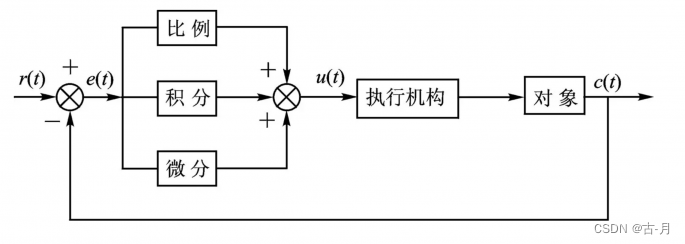
PID 分别是 Proportion(比例)、Integral(积分)、Differential(微分)的首字母缩写。它是一种结合比例、积分和微分三个环节于一体的闭环控制算法。
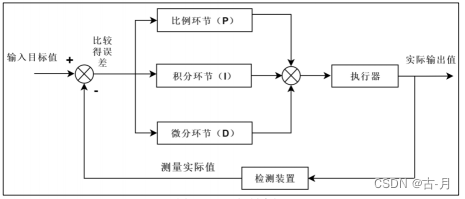
我们将输入
目标值和实际输出值进行偏差的计算,然后把计算结果输入到 PID控制算法中,经过比例、积分和微分三个环节的运算,运算后的输出作用于执行器,从而让系统的实际值逐渐靠近目标值。
以大棚温控系统为例,来理解 PID 算法中三个环节的作用。
比例环节( Proportion)
比例环节可以成比例地反应控制系统的偏差信号,即输出与输入偏差成正比,可以用来减小系统的偏差。公式如下:
![]()
- u ——- 输出
- Kp——- 比例系数
- e ——- 偏差
我们可以通过大棚温控去理解PID公式。例如需要调节棚内温度为 30℃,而实际温度为 10℃,此时的偏差 e=20,由比例环节的公式可知,当 e 确定时,Kp 越大则输出u 越大,也就是温控系统的调节力度越大,这样就可以更快地达到目标温度;而当 Kp 确定时,偏差 e 越大则输出 u 越大。由此可见,在比例环节中,比例系数 Kp 和偏差 e 越大则系统消除偏差的时间越短,
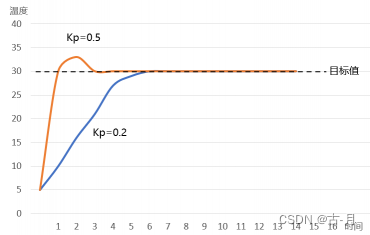
- 当 Kp 的值越大时,其对应的橙色曲线达到目标值的时间就越短,与此同时,橙色曲线出现了一定幅度的超调和振荡,这会使得系统的稳定性下降。所以我们在设置比例系数的时候,并不是越大越好,而是要兼顾消除偏差的时间以及整个系统的稳定性。
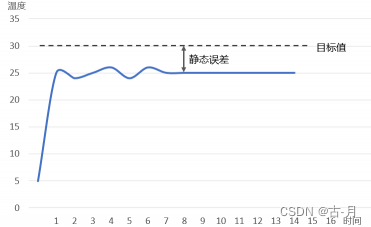
- 在实际的应用中,如果仅有比例环节的控制,可能会给系统带来一个问题:静态误差。
- 静态误差是指系统控制过程趋于稳定时,目标值与实测值之间的偏差。
如果我们在需要调节棚内温度为 30℃,而实际温度为 25℃,此时偏差 e=5,Kp 为固定值,那么此时的输出可以让大棚在半个小时之内升温 5℃,而外部的温差可以让大棚在半个小时之内降温 5℃,也就是说,输出 u 的作用刚好被外部影响抵消了,这就使得偏差会一直存在。
我们可以通过增大 Kp 来增大输出,以此消除偏差。在实际应用中,此方法的局限性很大,因为我们不能确定偏差的大小,它是在实时变化的,如果我们把 Kp 设置得太大,就会引入超调和振荡,让整个系统的稳定性变差。因此,为了消除静态误差,我们引入了积分环节。
积分环节(Integral)
积分环节可以对偏差 e 进行积分,只要存在偏差,积分环节就会不断起作用,主要用于消除静态误差,提高系统的无差度。引入积分环节后,比例+积分环节的公式如下:

- u ——- 输出
- e ——- 偏差
- ∑e——- 累计偏差
- Kp——- 比例系数
- Ki——- 积分系数
通过以大棚温控分析可以知道,如果温控系统的比例环节作用被抵消,存在静态误差 5℃,此时偏差存在,积分环节会一直累计偏差,以此增大输出,从而消除静态误差。从上述公式中可以得知,当积分系数 Ki 或者累计偏差越大时,输出就越大,系统消除静态误差的时间就越短。
点击 ⑤-1 学习PID--什么是PID - 古月居可查看全文