中国人工智能产业年会(CAIIAC)是中国人工智能技术发展和应用的重要展示平台,不仅关注创新,还涵盖了市场和监管方面的内容,对于促进人工智能领域的发展起到了重要作用。年会汇集了来自学术界、工业界和政府的专家,聚焦于人工智能技术在健康医疗、汽车、机器人等多个行业的快速发展和战略定位,在促进人工智能从业者之间的对话和合作方面发挥着关键作用。本次年会通过1场院士主题论坛、1场人工智能校长论坛、10场专题论坛以及1场大模型与人形机器人闭门座谈会,重点聚焦于大模型、自动驾驶、生成式AI、生物医药、脑机接口等热点领域,展望人工智能前沿趋势。

图1智能交通与自动驾驶专题论坛
智能交通系统集成运用人工智能、现代信息技术、数据通信传输技术、数据处理技术、控制技术和计算机技术等综合技术,实现了道路车辆的智能化控制和管理。该系统的发展旨在提高交通效率、增强交通安全、减少交通拥堵,以及降低能源消耗和环境影响。结合自动驾驶技术,智能交通系统有望彻底改变我们的交通体系,使之更加高效、安全和可持续。本文通过深入解读来自学术界和工业界五位专家关于智能交通和自动驾驶的最新观点,探讨了目前的研究热点,展望了未来的发展方向。本文作者为朱旺,审校为李杨和陆新颖。
热点一:端到端的自动驾驶
端到端的自动驾驶是指利用单个神经网络模型直接实现从原始传感器数据(如摄像头图像)到汽车控制命令的转换。通过端到端的自动驾驶系统,车辆可以直接从原始传感器数据中学习到驾驶策略,而无需依赖传统的感知、定位、规划等模块。这种方法的优势在于可以减少系统的复杂性,并且能够更好地适应复杂、多变的驾驶环境。在学术界和工业界一致认为,在端到端的学习中,数据和仿真器是最重要的。获取足够有效的数据是实现端到端自动驾驶的重要前提。此外,目前对模型的评估存在一些问题,评测良好的模型在实际落地应用时却得不到预期的效果,因此一个能够真实反应模型性能的仿真器是目前需要迫切解决的问题。同时,工业界更关注自动驾驶的安全性,如何保障自动驾驶的下限是关键问题。而学术界认为目前需要确定神经网络正确的优化目标,即模型的输出是否必须是运动轨迹。
热点二: SORA与自动驾驶
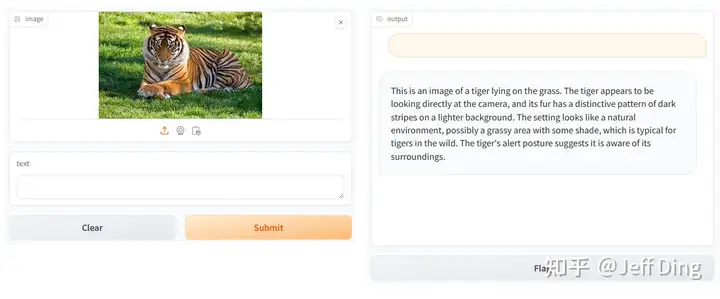
SORA是OpenAI发布的文本生成视频大模型,它能够根据文本描述,自动生成60秒的精细复杂视频。自动驾驶需要大量的视频数据用于模型训练,SORA生成的视频是否能够帮助自动驾驶解决数据稀缺问题呢?工业界认为,SORA提供了一定程度上的合成数据,但需要进一步对视频内容进行自动标注,否则可能会浪费人力物力。此外,生成的视频必须保证其行为真实性,不能出现类似“老虎骑自行车”等真实世界不可能发生的场景。学术界认为,目前SORA生成的视频还需要解决两个问题:真实性和交互性。生成仿真场景相对简单,但生成可信的仿真结果较为困难。生成的视频还需考虑现实世界存在的重力加速度等因素,并且视频中的内容应具有一定的联系交互,而不仅仅是独立存在。
热点三:L4级别自动驾驶
Level 4(L4)级自动驾驶车辆能够在指定条件和区域内实现完全自主驾驶,从而减少了由人为错误导致的交通事故。这些系统通常配备高级传感器和算法,能够在复杂的交通环境中做出快速准确的判断,从而在很大程度上提高交通效率、安全性和乘坐舒适性。尽管学术界和工业界都认为L4级自动驾驶在未来三到五年有很大的发展前景和落地的可能性,但也都认为它存在一些问题。学术界认为目前的场景开放度比较小,只能在特定场景下进行L4级自动驾驶,因此需要发布更多相应的法律法规来对自动驾驶领域进行指导。此外,还需要发展更适合自动驾驶的基础设施,并提高车辆自身的品质。而工业界更关注资本介入和成本问题。资本的投入可以大大加快某一领域的发展,但在资本眼中,99%等同于0%(注:实现完全的自动驾驶非常重要),因此如果无法快速实现落地会导致撤资的风险。L4级自动驾驶与L2级自动驾驶有着很大的区别,L4级更注重可靠性,即安全问题,而L2级更看重功能性。提高可靠性需要更高的成本来维护,这也是自动驾驶在工业界存在的一个问题。但工业界提出了一个思路:通过功能性的完善来进一步增强L4级自动驾驶的安全性,然后通过功能性的成熟,即技术的提升来降低成本问题。