目录
概述
1 认识QSPI
1.1 QSPI介绍
1.2 QUADSPI 主要特性
2 QUADSPI 功能说明
2.1 双闪存模式禁止
2.2 双闪存模式使能
3 QUADSPI 的用法
3.1 间接模式的操作步骤
3.1.1 QUADSPI 间接模式时配置帧模式
3.1.2 写控制寄存器 (QUADSPI_CR)
3.1.3 写通信配置寄存器 (QUADSPI_CCR)
3.1.4 其他配置
3.2 状态标志轮询模式
3.3 内存映射模式
4 QUADSPI 寄存器
4.1 QUADSPI 控制寄存器 (QUADSPI_CR)
4.2 QUADSPI 状态寄存器 (QUADSPI_SR)
4.3 QUADSPI 标志清零寄存器 (QUADSPI_FCR)
4.4 QUADSPI 数据长度寄存器 (QUADSPI_DLR)
4.5 QUADSPI 通信配置寄存器 (QUADSPI_CCR)
4.6 QUADSPI 地址寄存器 (QUADSPI_AR)
4.7 QUADSPI 交替字节寄存器 (QUADSPI_ABR)
4.8 QUADSPI 数据寄存器 (QUADSPI_DR)
4.9 QUADSPI 轮询状态屏蔽寄存器 (QUADSPI _PSMKR)
4.10 QUADSPI 轮询状态匹配寄存器 (QUADSPI _PSMAR)
4.11 QUADSPI 轮询间隔寄存器 (QUADSPI _PIR)
4.12 QUADSPI 低功耗超时寄存器 (QUADSPI_LPTR)
概述
本文主要介绍STM32H7的QSPI功能及其寄存器的配置参数,笔者仔细研读《STM32H7x3基于 ARM 内核的 32 位高级 MCU》,将该文档中QSPI的相关内容摘录出来汇编成本篇文章,方便项目设计中使用。
1 认识QSPI
1.1 QSPI介绍
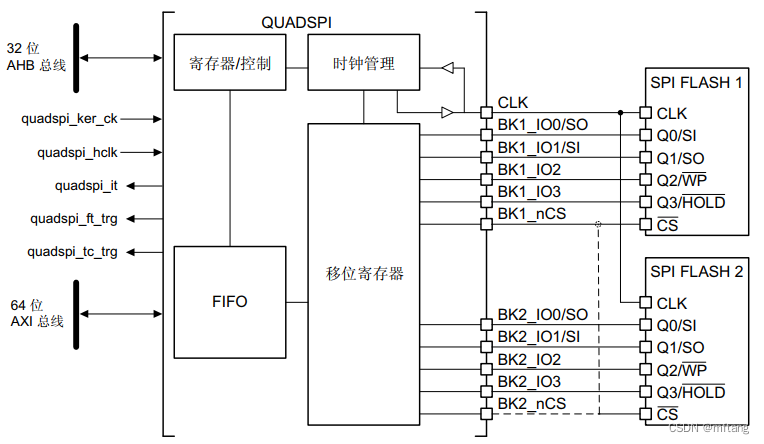
QUADSPI 是一种专用的通信接口,连接单、双或四(条数据线) SPI FLASH 存储介质。该接口可以在以下三种模式下工作:
| 模式 | 描述 |
|---|---|
| 间接模式 | 使用 QUADSPI 寄存器执行全部操作 |
| 状态轮询模式 | 周期性读取外部 FLASH 状态寄存器,而且标志位置 1 时会产生中断(如 擦除或烧写完成,会产生中断) |
| 内存映射模式 | 外部 FLASH 映射到微控制器地址空间,从而系统将其视作内部存储器 |
| 双闪存模式 | 采用双闪存模式时,将同时访问两个 Quad-SPI FLASH,吞吐量和容量均可提高二倍。 |
1.2 QUADSPI 主要特性
1)三种功能模式:间接模式、状态轮询模式和内存映射模式
2)双闪存模式,通过并行访问两个 FLASH,可同时发送/接收 8 位数据
3)支持 SDR 和 DDR 模式
4)针对间接模式和内存映射模式,完全可编程操作码
5)针对间接模式和内存映射模式,完全可编程帧格式
6)集成 FIFO,用于发送和接收
7)允许 8、 16 和 32 位数据访问
8)在达到 FIFO 阈值和传输完成时生成 MDMA 触发信号
9)在达到 FIFO 阈值、超时、操作完成以及发生访问错误时产生中断
2 QUADSPI 功能说明
2.1 双闪存模式禁止

2.2 双闪存模式使能
3 QUADSPI 的用法
使用 FMODE[1:0] (QUADSPI_CCR[27:26]) 选择操作模式。
3.1 间接模式的操作步骤
FMODE编程为 00 可选择间接写入模式,将数据发送到 FLASH。 FMODE编程为 01 可选择间接读取模式,读取 FLASH 中的数据。
3.1.1 QUADSPI 间接模式时配置帧模式
1)在 QUADSPI_DLR 中指定待读取或写入的字节数
2)在 QUADSPI_CCR 中指定帧格式、模式和指令代码
3)在 QUADSPI_ABR 中指定要在地址阶段后立即发送的可选交替字节
4)在 QUADSPI_CR 中指定工作模式。
5)在 QUADSPI_AR 中指定目标地址。
6)通过 QUADSPI_DR 从 FIFO 读取数据/向 FIFO 写入数据
3.1.2 写控制寄存器 (QUADSPI_CR)
1)使能位 (EN) 设置为“1
2)超时计数器使能位 (TCEN)
3)采样移位设置 (SSHIFT)
4)FIFO 阈值 (FTRHES),以指示 FTF 标志在何时置 1
5)中断使能
6)自动轮询模式参数:匹配模式和停止模式 (在 FMODE = 11 时有效)
7)时钟预分频器
3.1.3 写通信配置寄存器 (QUADSPI_CCR)
1)通过 INSTRUCTION 位指定指令字节
2)通过 IMODE 位指定指令发送方式( 1/2/4 线)
3)通过 ADMODE 位指定地址发送方式(无/1/2/4 线)
4)通过 ADSIZE 位指定地址长度( 8/16/24/32 位)
5)通过 ABMODE 位指定交替字节发送方式(无/1/2/4 线)
6)通过 ABSIZE 位指定交替字节数 (1/2/3/4)
7)通过 DBMODE 位指定是否存在空指令字节
8)通过 DCYC 位指定空指令字节数
9)通过 DMODE 位指定数据发送/接收方式(无/1/2/4 线)
3.1.4 其他配置
如果无需为某个命令更新地址寄存器 (QUADSPI_AR) 与数据寄存器 (QUADSPI_DR),则在写入 QUADSPI_CCR 时,该命令序列便立即启动。在 ADMODE 和 DMODE 均为 00 时,或在间接读取模式 (FMODE = 01) 下仅 ADMODE = 00 时,便属于此情况。
在需要地址(ADMODE 不为00) ,但无需写入数据寄存器(FMODE = 01 或 DMODE = 00)时,通过写入 QUADSPI_AR 新地址后,命令序列便立即启动。在数据传输( FMODE = 00 并且 DMODE ! = 00)中,通过QUADSPI_DR 写入 FIFO 触发通信启动
3.2 状态标志轮询模式
将 FMODE 字段 (QUADSPI_CCR[27:26]) 设置为 10,使能状态标志轮询模式。
在此模式下,将发送编程的帧并周期性检索数据。每帧中读取的最大数据量为 4 字节。如果 QUADSPI_DLR 请求更多的数据,则忽略多余的部分并仅读取 4 个字节。
在 QUADSPI_PISR 寄存器中指定周期性。
在检索到状态数据后,可在内部进行处理,以达到以下目的:
1)将状态匹配标志位置 1,如果使能,还将产生中断
2)自动停止周期性检索状态字节
接收到的值可通过存储于 QUADSPI_PSMKR 中的值进行屏蔽,并与存储在 QUADSPI_PSMAR
中的值进行或运算或与运算。若是存在匹配,则状态匹配标志置 1, 并且在使能了中断的情况下还将产生中断;如果AMPS 位置 1,则 QUADSPI 自动停止。在任何情况下,最新的检索值都在 QUADSPI_DR 中可用。
3.3 内存映射模式
将 QUADSPI_CCR 寄存器中的 FMODE 设置为 11 可进入内存映射模式。
在内存映射模式下,外部 FLASH 被视为内部存储器,只是存在访问延迟。在该模式下,仅允许对外部 FLASH 执行读取操作。当主器件访问存储器映射空间时,将发送已编程的指令和帧。FIFO 用作预取缓冲区以接受线性读取。
在此模式中,对于 QUADSPI_DR 的任何访问均返回零。数据长度寄存器 (QUADSPI_DLR) 在内存映射模式中无意义。
4 QUADSPI 寄存器
4.1 QUADSPI 控制寄存器 (QUADSPI_CR)
偏移地址: 0x0000
复位值: 0x0000 0000
位 31:24 PRESCALER[7:0]:时钟预分频器 (Clock prescaler)
该字段定义基于 quadspi_ker_ck 时钟生成 CLK 所用的分频系数(值 + 1)。
0: FCLK = Fquadspi_ker_ck, quadspi_ker_ck 时钟直接用作 QUADSPI CLK(预分频器被旁路)
1: FCLK = Fquadspi_ker_ck/2
2: FCLK = Fquadspi_ker_ck/3
...
255: FCLK = Fquadspi_ker_ck/256
对于奇数时钟分频系数, CLK 的占空比并非 50%。时钟信号的低电平持续时间比高电平
持续时间多一个周期仅可在 BUSY = 0 时修改该字段。
位 23 PMM:轮询匹配模式 (Polling match mode)
该位指示在自动轮询模式期间用来确定是否“匹配”的方法。
0: AND 匹配模式。如果从 FLASH 接收的所有未屏蔽位均与匹配寄存器中的对应位相匹配,则 SMF 置 1。
1: OR 匹配模式。如果从 FLASH 接收的任意一个未屏蔽位与匹配寄存器中的对应位相匹配,则 SMF 置 1。
仅可在 BUSY = 0 时修改该位。
位 22 APMS:自动轮询模式停止 (Automatic poll mode stop)
该位确定在匹配后自动轮询是否停止。
0:仅通过中止或禁用 QUADSPI 停止自动轮询模式。
1:发生匹配时,自动轮询模式停止。
仅可在 BUSY = 0 时修改该位。
位 20 TOIE: TimeOut 中断使能 (TimeOut interrupt enable)
该位使能 TimeOut 中断。
0:禁止中断
1:使能中断
位 19 SMIE:状态匹配中断使能 (Status match interrupt enable)
该位使能状态匹配中断。
0:禁止中断
1:使能中断
位 18 FTIE: FIFO 阈值中断使能 (FIFO threshold interrupt enable)。
该位使能 FIFO 阈值中断。
0:禁止中断
1:使能中断
位 17 TCIE:传输完成中断使能 (Transfer complete interrupt enable)
该位使能传输完成中断。
0:禁止中断
1:使能中断
位 16 TEIE:传输错误中断使能 (Transfer error interrupt enable)
该位使能传输错误中断。
0:禁止中断
1:使能中断
位 12:8 FTHRES[4:0]: FIFO 阈值级别 (FIFO threshold level)
定义在间接模式下 FIFO 中将导致 FIFO 阈值标志(FTF, QUADSPI_SR[2])置 1 的字
节数阈值。
在间接写入模式下 (FMODE = 00):
0:如果 FIFO 中存在 1 个或更多空闲字节可供写入,则 FTF 置 1
1:如果 FIFO 中存在 2 个或更多空闲字节可供写入,则 FTF 置 1
...
31:如果 FIFO 中存在 32 个空闲字节可供写入,则 FTF 置 1
在间接读取模式下 (FMODE = 01):
0:如果 FIFO 中存在 1 个或更多有效字节可供读取,则 FTF 置 1
1:如果 FIFO 中存在 2 个或更多有效字节可供读取,则 FTF 置 1
...
31:如果 FIFO 中存在 32 个有效字节可供读取,则 FTF 置 1
位 7 FSEL: FLASH 选择 (FLASH memory selection)
该位选择单闪存模式 (DFM = 0) 下要寻址的 FLASH。
0:选择 FLASH 1
1:选择 FLASH 2
仅可在 BUSY = 0 时修改该位。
在 DFM = 1 时忽略该位
位 6 DFM:双闪存模式 (Dual-flash mode)
该位激活双闪存模式,同时使用两个外部 FLASH 以将吞吐量和容量扩大一倍。
0:禁止双闪存模式
1:使能双闪存模式。
仅可在 BUSY = 0 时修改该位。
位 4 SSHIFT:采样移位 (Sample shift)
默认情况下, QUADSPI 在 FLASH 驱动数据后过半个 CLK 周期开始采集数据。使用该
位,可考虑外部信号延迟,推迟数据采集。
0:不发生移位
1:移位半个周期
在 DDR 模式下 (DDRM = 1),固件必须确保 SSHIFT = 0。
仅可在 BUSY = 0 时修改该字段。
位 3 TCEN:超时计数器使能 (Timeout counter enable)
该位仅在内存映射模式 (FMODE = 11) 下有效。激活该位后,如果在一段时间(通过TIMEOUT[15:0] (QUADSPI_LPTR) 定义)内一直没有进行访问,将释放片选 (nCS)
(从而降低功耗)。
使能超时计数器。
默认情况下,即便在很长时间内不访问 FLASH, QUADSPI 也不会停止预取操作,之前的读取操作将保持激活状态并且 nCS 保持低电平。由于 nCS 保持低电平时, FLASH 功耗增加,应用程序可能会激活超时计数器( TCEN = 1, QUADSPI_CR 的位 3)。从而在FIFO 中写满预取的数据后,若在 TIMEOUT[15:0] (QUADSPI_LPTR) 个周期的时长内没有访问,则释放 nCS。
0:禁止超时计数器,在内存映射模式中进行访问后,片选 (nCS) 保持激活。
1:使能超时计数器,在内存映射模式下, FLASH 持续不活动 TIMEOUT[15:0] 个周期后
释放片选 (nCS)。
仅可在 BUSY = 0 时修改该位。
位 1 ABORT:中止请求 (Abort request)
该位中止执行中的命令序列。在中止完成时自动复位。
该位可停止当前的传输。
在轮询模式或内存映射模式下,该位也用以复位 APM 位或 DM 位。
0:不请求中止
1:请求中止
位 0 EN:使能 (Enable)
使能 QUADSPI。
0:禁止 QUADSPI
1:使能 QUADSPI
4.2 QUADSPI 状态寄存器 (QUADSPI_SR)
偏移地址: 0x0008
复位值: 0x0000 0000
位 13:8 FLEVEL[5:0]: FIFO 级别 (FIFO level)
该字段给出 FIFO 中的有效字节数。 FIFO 为空时 FLEVEL = 0,写满时 FLEVEL = 32。在内存映射模式和自动状态轮询模式下, FLEVEL 为零。
位 5 BUSY:忙 (Busy)
操作进行时,该位置 1。在对 FLASH 的操作完成并且 FIFO 为空时,该位自动清零。
位 4 TOF:超时标志 (Timeout flag)
发生超时时该位置 1。向 CTOF 写入 1 可将该位清零。
位 3 SMF:状态匹配标志 (Status match flag)
在自动轮询模式下,若未屏蔽的接收数据与匹配寄存器 (QUADSPI_PSMAR) 中的对应位相匹配,则该位置 1。向 CSMF 写入 1 可将该位清零。
位 2 FTF: FIFO 阈值标志 (FIFO threshold flag)
在间接模式下,若达到 FIFO 阈值,或从 FLASH 读取完成后, FIFO 中留有数据时,该位置 1。只要阈值条件不再为“真”,该位就自动清零。
在自动轮询模式下,每次读取状态寄存器时,该位即置 1 ;读取数据寄存器时,该位清零。
位 1 TCF:传输完成标志 (Transfer complete flag)
在间接模式下,当传输的数据数量达到编程设定值,或在任何模式下传输中止时,该位置 1。向 CTCF 写入 1 时,该位清零。
位 0 TEF:传输错误标志 (Transfer error flag)
在间接模式下访问无效地址时,该位置 1。向 CTEF 写入 1 可将该位清零。
4.3 QUADSPI 标志清零寄存器 (QUADSPI_FCR)
偏移地址: 0x000C
复位值: 0x0000 0000
位 4 CTOF:清除超时标志 (Clear timeout flag)
写入 1 可将 QUADSPI_SR 寄存器中的 TOF 标志清零
位 3 CSMF:清除状态匹配标志 (Clear status match flag)
写入 1 可将 QUADSPI_SR 寄存器中的 SMF 标志清零
位 2 保留,必须保持复位值。
位 1 CTCF:清除传输完成标志 (Clear transfer complete flag)
写入 1 可将 QUADSPI_SR 寄存器中的 TCF 标志清零
位 0 CTEF:清除传输错误标志 (Clear Transfer error flag)
写入 1 可将 QUADSPI_SR 寄存器中的 TEF 标志清零
4.4 QUADSPI 数据长度寄存器 (QUADSPI_DLR)
偏移地址: 0x0010
复位值: 0x0000 0000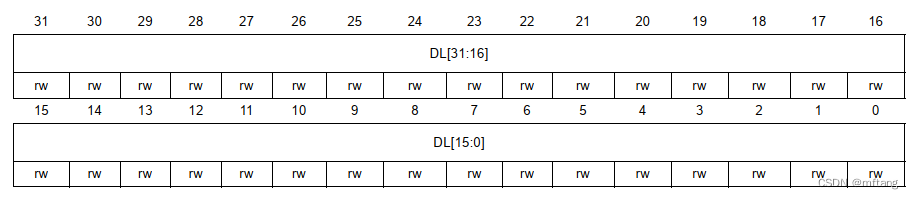
4.5 QUADSPI 通信配置寄存器 (QUADSPI_CCR)
偏移地址: 0x0014
复位值: 0x0000 0000
位 31 DDRM:双倍数据速率模式 (Double data rate mode)
该位为地址、交替字节和数据阶段设置 DDR 模式:
0:禁止 DDR 模式
1:使能 DDR 模式
仅可在 BUSY = 0 时写入该字段。
位 30 DHHC: DDR 保持 (DDR hold)
在 DDR 模式下,延迟 1/4 个 QUADSPI 输出时钟周期再输出数据:
0:使用模拟延迟来延迟数据输出。
1:延迟 1/4 个 QUADSPI 输出时钟周期再输出数据。
该特性仅在 DDR 模式下激活。
仅可在 BUSY = 0 时写入该字段
位 29 FRCM: 自由运行时钟模式 (Free Running Clock Mode)
该位置 1 时,无论 FMODE 位如何, QUADSPI 外设均进入自由运行时钟模式。
0:正常模式
1:自由运行时钟模式
仅可在 BUSY = 0 时写入该位。
位 28 SIOO:仅发送指令一次模式 (Send instruction only once mode)
指令仅发送一次。 IMODE = 00 时,该位不起作用。
0:在每个事务中发送指令
1:仅为第一条命令发送指令
仅可在 BUSY = 0 时写入该字段。
位27:26 FMODE[1:0]:功能模式 (Functional mode)
该字段定义 QUADSPI 操作的功能模式:
00:间接写入模式
01:间接读取模式
10:自动轮询模式
11:内存映射模式
仅可在 BUSY = 0 时写入该字段。
位 25:24 DMODE[1:0]:数据模式 (Data mode)
该字段定义数据阶段的操作模式:
00:无数据
01:单线传输数据
10:双线传输数据
11:四线传输数据
该字段还定义空指令阶段的操作模式。
仅可在 BUSY = 0 时写入该字段
位22:18 DCYC[4:0]:空指令周期数 (Number of dummy cycles)
该字段定义空指令阶段的持续时间。在 SDR 和 DDR 模式下,它指定 CLK 周期数 (0-31)。
仅可在 BUSY = 0 时写入该字段
位 17:16 ABSIZE[1:0]:交替字节长度 (Alternate bytes size)
该位定义交替字节长度:
00: 8 位交替字节
01: 16 位交替字节
10: 24 位交替字节
11: 32 位交替字节
仅可在 BUSY = 0 时写入该字段。
位 15:14 ABMODE[1:0]:交替字节模式 (Alternate bytes mode)
该字段定义交替字节阶段的操作模式:
00:无交替字节
01:单线传输交替字节
10:双线传输交替字节
11:四线传输交替字节
仅可在 BUSY = 0 时写入该字段。
位 13:12 ADSIZE[1:0]:地址长度 (Address size)
该位定义地址长度:
00: 8 位地址
01: 16 位地址
10: 24 位地址
11: 32 位地址
仅可在 BUSY = 0 时写入该字段
位 11:10 ADDRESS[1:0]:地址模式 (Address mode)
该字段定义地址阶段的操作模式:
00:无地址
01:单线传输地址
10:双线传输地址
11:四线传输地址
仅可在 BUSY = 0 时写入该字段。
位 9:8 IMODE[1:0]:指令模式 (Instruction mode)
该字段定义指令阶段的操作模式:
00:无指令
01:单线传输指令
10:双线传输指令
11:四线传输指令
仅可在 BUSY = 0 时写入该字段。
位 7:0 INSTRUCTION[7:0]:指令 (Instruction)
指定要发送到外部 SPI 设备的指令。
仅可在 BUSY = 0 时写入该字段
4.6 QUADSPI 地址寄存器 (QUADSPI_AR)
偏移地址: 0x0018
复位值: 0x0000 0000
4.7 QUADSPI 交替字节寄存器 (QUADSPI_ABR)
偏移地址: 0x001C
复位值: 0x0000 0000
4.8 QUADSPI 数据寄存器 (QUADSPI_DR)
偏移地址: 0x0020
复位值: 0x0000 0000
4.9 QUADSPI 轮询状态屏蔽寄存器 (QUADSPI _PSMKR)
偏移地址: 0x0024
复位值: 0x0000 0000
位 31:0 MASK[31:0]:状态屏蔽 (Status mask)
对在轮询模式下接收的状态字节进行屏蔽
对于位 n:
0:屏蔽在自动轮询模式下所接收数据的位 n,在匹配逻辑中不考虑其值
1:不屏蔽在自动轮询模式下所接收数据的位 n,在匹配逻辑中考虑其值
仅可在 BUSY = 0 时写入该字段。
4.10 QUADSPI 轮询状态匹配寄存器 (QUADSPI _PSMAR)
偏移地址: 0x0028
复位值: 0x0000 0000
位 31:0 MATCH[31:0]:状态匹配 (Status match)
该值将与屏蔽状态寄存器比较以进行匹配
仅可在 BUSY = 0 时写入该字段
4.11 QUADSPI 轮询间隔寄存器 (QUADSPI _PIR)
偏移地址: 0x002C
复位值: 0x0000 0000
位 15:0 INTERVAL[15:0]:轮询间隔 (Polling interval)
自动轮询阶段读取操作之间的 CLK 周期数。
仅可在 BUSY = 0 时写入该字段。
4.12 QUADSPI 低功耗超时寄存器 (QUADSPI_LPTR)
偏移地址: 0x0030
复位值: 0x0000 0000
位 15:0 TIMEOUT[15:0]:超时时长 (Timeout period)
在内存映射模式下,每次访问结束后, QUADSPI 将预取后续字节并将其存放在 FIFO中。该字段指示在 FIFO 写满后, QUADSPI 等待多少个 CLK 时钟周期才让 nCS 升至高电平将 FLASH 置为低功耗状态。
仅可在 BUSY = 0 时写入该字段。