Table of Contents
- 实现区间树的起因
- 区间树实现简介
- 插入/删除
- 查询重叠操作
- 使用Safe Rust实现区间树
- 问题
- Rc<RefCell<T>>
i. 线程安全问题 - 其他智能指针
i. Arc<Mutex<T>>?
ii. QCell - 数组模拟指针
- 总结
01、实现区间树的起因
在Xline最近的一次重构中, 我们发现有两个在关键路径上的数据结构Speculative Pool和Uncommitted Pool导致了性能瓶颈。这两个数据结构用于在CURP中进行冲突检测。具体来说, 由于CURP协议的要求, 对于每个处理的command, 需要在已经接收的commands中找到所有与当前command相冲突的commands。
例如对于KV操作 put/get_range/delete_range, 我们需要考虑这些操作之间可能的冲突情况。由于每个KV操作都会有一个key的范围, 所以问题就转化为要查询某一个key范围和某个Pool中所有key范围的集合是否有相交。采用朴素遍历整个集合的方法会导致每次查询的时间复杂度为 O(n),从而降低效率并导致性能瓶颈。
为了解决这一问题, 我们需要引入区间树这一数据结构。区间树能够高效支持重叠区间的插入,删除和查询操作, 这三种操作都可以在 O(log(n)) 的时间内完成。因此, 我们可以利用区间树维护key范围的集合, 从而解决性能瓶颈的问题。
02、区间树实现简介
Xline中的区间树是基于 Introduction to Algorithms (3rd ed.) 实现的, 它是由二叉平衡树扩展而来。
区间树以一颗二叉平衡树为基础(例如使用红黑树实现), 将区间本身作为平衡树的key。对于区间 [low, high] , 我们首先按照 low 值进行排序, 如果 low 值相同, 再按照 high 值进行排序, 这样对区间集合能够定义一个全序的关系(如果不处理重复区间则不需要对 high 排序)。同时, 对于平衡树的每一个节点, 我们在这个节点上记录以这个节点为根的子树中 high 的最大值, 记为 max 。
插入/删除
与红黑树的插入/删除相同, 最坏时间复杂度为 O(log(n))
查询重叠操作
给出一个区间 i , 我们需要查询当前树中是否有区间和 i 重合。在Introduction to Algorithms中给出的伪代码如下
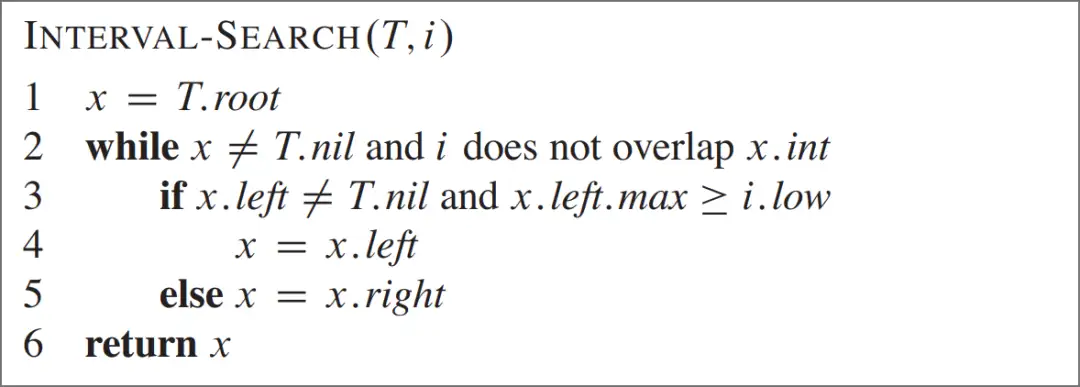
有了 max 的定义, 解决这个问题的思路就非常简单了: 对于以 x 为根的子树 T_x , 如果 i 不和 x_i 相交, 那么 i 一定是在 x_i 的左侧或者右侧。
1. 如果 i 在 x_i 的左侧这时可以直接排除右子树, 因为这时 i.high 比 x_i.low 还要小
2. 如果 i 在 x_i 的右侧在这种情况下, 我们无法直接排除左子树, 因为左子树中的节点区间仍然可能和 i 相交。这时候 max 值就派上用场了:
- 如果 x 的左子树中 high 的最大值仍然小于 i.low 的话, 那么可以直接排除 x 的左子树。
- 如果 x 的左子树中 high 的最大值大于或等于 i.low 的话, 那么左子树中一定存在和 i 相交的区间, 因为 x 左子树中所有的 low 都小于 x_i.low , 而 i 在 x_i 的右侧, 所以 x 左子树中所有的 low 也小于 i.low , 因此一定有相交。
通过以上两点可以验证上述伪代码的正确性, 并且从代码可以看出查询的最坏时间复杂度为 O(log(n)) 。
03、使用Safe Rust实现区间树
困难点
为了构建区间树, 我们首先需要实现一个红黑树。在红黑树中, 每个树节点需要指向父节点, 这就要求一个节点实例存在多个所有权。
Rc<RefCell<T>>
最初我尝试使用了Rust最常见的多所有权的实现 Rc<RefCell<T>> , 树节点结构类似于以下的代码:
struct Node<T, V> {left: Option<NodeRef<T, V>>,right: Option<NodeRef<T, V>>,parent: Option<NodeRef<T, V>>,...
}struct NodeRef<T, V>(Rc<RefCell<Node<T, V>>>);从数据结构定义上看起来还算清晰, 但是实际使用起来相当繁琐, 因为 RefCell 要求用户明确地调用 borrow , 或者 borrow_mut , 我不得不构建很多helper functions来简化实现, 下面是一些例子:
impl<T, V> NodeRef<T, V> {fn left<F, R>(&self, op: F) -> RwhereF: FnOnce(&NodeRef<T, V>) -> R,{op(self.borrow().left())}fn parent<F, R>(&self, op: F) -> RwhereF: FnOnce(&NodeRef<T, V>) -> R,{op(self.borrow().parent())}fn set_right(&self, node: NodeRef<T, V>) {let _ignore = self.borrow_mut().right.replace(node);}fn set_max(&self, max: T) {let _ignore = self.borrow_mut().max.replace(max);}...
}RefCell使用上不符合人体工程学是一点, 更糟糕的是我们在代码中需要使用大量的 Rc::clone , 因为在自上而下遍历树节点时, 我们需要持有一个节点的owned type, 而不是一个引用。例如在之前提到的 INTERVAL-SEARCH 操作中, 每次 x = x.left 或者 x = x.right , 首先需要borrow x本身, 再赋值给x。因此需要先取得左(或右)节点的owned type, 再更新 x 到新值。这样导致大量的节点计数开销。
具体开销到底有多大?我尝试对于我们上面的实现进行benchmark, 使用随机数据插入和删除。我本机环境为Intel 13600KF和DDR4内存。
test bench_interval_tree_insert_100 ... bench: 9,821 ns/iter (+/- 263)
test bench_interval_tree_insert_1000 ... bench: 215,362 ns/iter (+/- 6,536)
test bench_interval_tree_insert_10000 ... bench: 2,999,694 ns/iter (+/- 134,979)
test bench_interval_tree_insert_remove_100 ... bench: 18,395 ns/iter (+/- 750)
test bench_interval_tree_insert_remove_1000 ... bench: 385,858 ns/iter (+/- 7,659)
test bench_interval_tree_insert_remove_10000 ... bench: 5,465,355 ns/iter (+/- 114,735)使用相同数据和环境, 和etcd的golang区间树实现进行对比:
BenchmarkIntervalTreeInsert100-20 123747 12250 ns/op
BenchmarkIntervalTreeInsert1000-20 7119 189613 ns/op
BenchmarkIntervalTreeInsert10_000-20 340 3237907 ns/op
BenchmarkIntervalTreeInsertRemove100-20 24584 45579 ns/op
BenchmarkIntervalTreeInsertRemove1000-20 344 3462977 ns/op
BenchmarkIntervalTreeInsertRemove10_000-20 3 358284695 ns/op可以看到我们的Rust实现并无优势, 甚至有时插入操作还会更慢。(注: 这里的etcd的节点删除实现似乎有问题, 观察节点数量从 1000->10000 时耗时的增长, 复杂度可能不是 O(log(n)))
线程安全问题
即使我们勉强接受以上的性能, 一个更严重的问题浮出水面: Rc<RefCell<T>> 无法在多线程环境下使用! 由于Xline是在Rust的Tokio runtime之上构建, 需要在多个线程间共享一个区间树实例。可惜的是, Rc 本身是 !Send , 因为 Rc 内部的引用计数是以非原子的方式递增/减的。那么这就导致整个区间树的数据结构无法发送到其他线程。除非我们采用一个专用线程, 并且通过channel与这个线程进行通信, 我们无法在多线程环境下使用。
其他智能指针
于是我们需要考虑其他智能指针来解决这个问题。一个自然的想法是使用 Arc<RefCell<T>> 。然而, RefCell本身是 !Sync , 因为 RefCell 的borrow checking只能在单线程下使用, 无法同时由多个线程共享, 并且 Arc<T> 是 Send 当且仅当 T 是 Sync , 因为 Arc 本身允许克隆。
Arc<Mutex<T>>?
那么在多线程环境多所有权似乎只能够使用 Arc<mutex<T>> 了。但是显然这对于我们的用例来说是一个anti-pattern, 因为这样我们就需要对每一个节点都加上一把锁, 而树中可能有数十万乃至几百万的节点, 这是不可接受的。
QCell
在使用常规方法无果后, 我们尝试使用了qcell这个crate, 其中 QCell 作为 RefCell 的多线程替代品。作者非常巧妙地解决了多所有权下借用检查的问题。
QCell设计
由于qcell的设计在 GhostCell 的论文中有正式的证明, 这里我就介绍介绍一下 GhostCell 论文中的设计:
在Rust中, 对于数据操作的权限和数据本身是绑定在一起的, 也就是说, 你首先要拥有一个数据, 才能修改它的状态。具体一点, 想要修改数据 T , 你要么有一个 T 本身, 要么有一个 &mut T 。
GhostCell 的设计概念是将对数据操作的权限和数据本身分开, 那么对于一种数据, 数据 T 本身是一个类型, 而它的权限同样也是是一个具体的类型, 记为 P_t 。这种设计相比与Rust现有设计就更加灵活, 因为可以让一个权限类型的实例拥有对一个数据集合的权限, 即一个 P_t 拥有多个 T 。在这种设计下, 只要权限类型实例本身是线程安全的, 它所管理的这一个数据集合也是线程安全的。
在qcell中使用方法如下, 首先需要创建一个 QCellOwner 代表前述的权限, QCell<T> 则表示储存的数据。
let mut owner = QCellOwner::new();
let item = Arc::new(QCell::new(&owner, Vec::<u8>::new()));
owner.rw(&item).push(0);QCellOwner 拥有注册到它这里的 QCell 的读写权限(通过 QCellOwner::rw 或者 QCellOwner::ro ), 所以只要 QCellOwner 是线程安全, QCell 中的数据也是线程安全的。在这里 QCellOwner 本身是 Send + Sync , QCell 也可以是 Send + Sync 只要 T 满足:
impl<T: ?Sized + Send> Send for QCell<T>
impl<T: ?Sized + Send + Sync> Sync for QCell<T>使用QCell
得益于它的设计, QCell 本身开销非常小(这里的具体的开销不展开讲了), 因为它借助于Rust类型系统使得borrow checking是在编译期检查的, 而 RefCell 相比之下则是在运行时检查, 因此使用 QCell 不仅能在多线程环境下使用, 还能够提升一部分性能。
接下来就是应用 QCell 到我们的树实现上了。由于 QCell 只提供内部可变性, 要能够使用多重所有权, 我们还需要有 Arc , 结构大致看起来如下:
pub struct IntervalTree {node_owner: QCellOwner,...
}struct NodeRef<T, V>(Arc<QCell<Node<T, V>>>);看起来不错, 那么性能如何呢?
test bench_interval_tree_insert_100 ... bench: 41,486 ns/iter (+/- 71)
test bench_interval_tree_insert_1000 ... bench: 586,854 ns/iter (+/- 13,947)
test bench_interval_tree_insert_10000 ... bench: 7,726,849 ns/iter (+/- 102,820)
test bench_interval_tree_insert_remove_100 ... bench: 75,569 ns/iter (+/- 325)
test bench_interval_tree_insert_remove_1000 ... bench: 1,135,232 ns/iter (+/- 7,539)
test bench_interval_tree_insert_remove_10000 ... bench: 15,686,474 ns/iter (+/- 194,385)比较之前的测试结果, 性能竟然下降了1-3倍。这说明最大的开销不是Cell, 而是引用计数, 在我们的区间树用例中, 使用 Arc 比 Rc 慢了非常多。
一个不使用 Arc 的方法是使用arena分配, 即一次性对所有对象分配内存, 并且销毁也是一次性的, 但是这在树的数据结构中并不适用, 因为我们需要动态地分配和销毁节点的内存。
数组模拟指针
性能测试反映出我们的智能指针尝试是失败的。在Rust所有权模型下, 使用智能指针来实现树结构是非常糟糕的。
那么我们可不可以不使用指针来实现呢? 一个自然的想法是使用数组来模拟指针。
于是我们的树结构重新设计如下:
pub struct IntervalTree {nodes: Vec<Node>,...
}pub struct Node {left: Option<u32>,right: Option<u32>,parent: Option<u32>,...
}可以看出在Rust中数组模拟指针的优势是不需要某个节点的所有权, 只需要记录下某个节点在 Vec 中的位置即可。每次插入新节点即向 nodes 后面push一个节点, 它的模拟指针就是 nodes.len() - 1 。
对于插入操作非常简单, 但是如果我们需要删除节点呢? 如果使用朴素的删除方法: 更新树节点的指针后直接将 Vec 中的对应的节点置为空, 那么这样就会在我们的 Vec 中留下一个“空洞”。这样的话我们需要再额外维护一个链表结构来记录这个“空洞”的位置, 以便在下一次插入的时候能重新使用。而且这种方法会导致 nodes 这个 Vec 的空间难以回收, 即使大部分节点已经被删除。
那么如何解决这个问题呢? 接下来我参照了petgraph中的方法, 在删除一个节点时, 将这个节点与 Vec 中最后一个节点交换再移除, 这样就解决了之前的内存回收的问题。需要注意的是, 我们需要同时更新与最后一个节点有关节点的指针, 因为它的位置发生了变化。在petgraph的图实现中, 这个操作可能是很耗时的, 因为一个节点可能会连接多条边, 但是在我们的树用例中, 我们只需要更新这个节点的父亲/左孩子/右孩子总共3个节点, 因此这个操作是 O(1) 的, 这样就非常高效的解决了节点删除的问题。
我们再来对我们的新实现进行benchmark:
test bench_interval_tree_insert_100 ... bench: 3,333 ns/iter (+/- 87)
test bench_interval_tree_insert_1000 ... bench: 85,477 ns/iter (+/- 3,552)
test bench_interval_tree_insert_10000 ... bench: 1,406,707 ns/iter (+/- 20,796)
test bench_interval_tree_insert_remove_100 ... bench: 7,157 ns/iter (+/- 69)
test bench_interval_tree_insert_remove_1000 ... bench: 189,277 ns/iter (+/- 3,014)
test bench_interval_tree_insert_remove_10000 ... bench: 3,060,029 ns/iter (+/- 50,829)从结构来看这次的性能提升非常之大, 对比之前的 Rc<RefCell<Node>> 或者是etcd的golang的实现大约快了1-2倍。
使用数组模拟指针不仅轻松解决了所有权的问题, 并且由于数组内存的连续性使其对于缓存更加友好, 比纯指针性能甚至会更高。
04、总结
至此, 我们成功完美解决了使用safe Rust实现区间树的问题。从之前所述的多种尝试来看, 在Rust中使用引用计数智能指针来实现树或者图的数据结构是失败的, 因为这些智能指针并不适用于大量的内存操作。将来如果需要使用safe Rust实现指针类数据结构, 我会优先考虑使用数组而不是智能指针。
往期推荐
1.Xline 源码解读(一) —— 初识 CURP 协议
2.Xline 源码解读(三) —— CURP Server 的实现