1. 机械爪抓取时旋转的角度定义
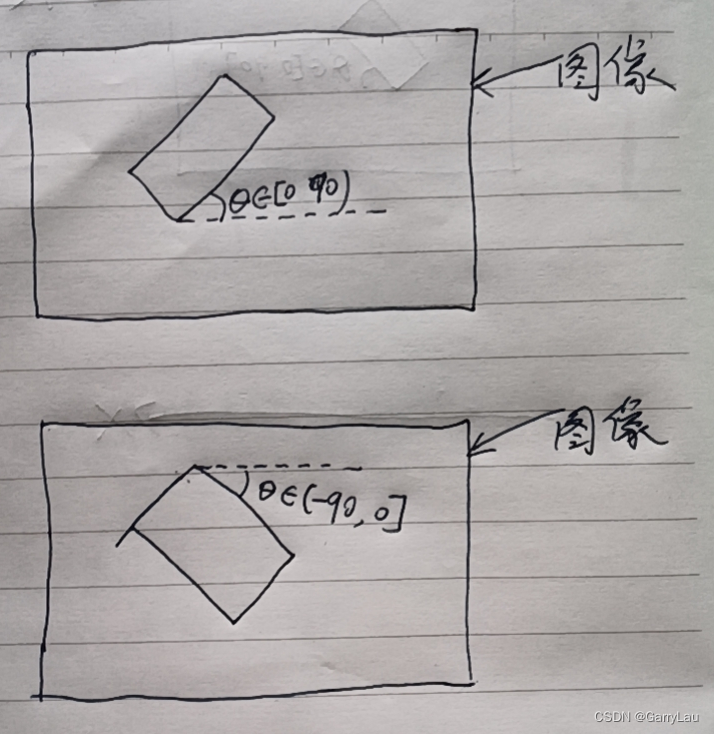
以X轴正方向(右)为零度方向,角度取值范围[-90°,90°)。
确认角度的方法:
逆时针旋转X轴,X轴碰到矩形框长边时旋转过的角度记为angleX:
1.如果angleX小于90°,则度数就是angleX。
2.如果angleX大于90°,则度数就是-(180-angleX);也等于将X轴顺时针旋转碰到长边时的角度取负值。
以X轴正方向(右)为零度方向,角度取值范围[0°,180°)。
确认角度的方法:
逆时针旋转X轴,X轴碰到矩形框长边时旋转的角度记为angleX。
将[-90°,90°)表示方式转换为[0°,180°)表示方式:
1.如果angleX >0,则angleX不变;
2.如果angleX<0,则angleX = 180-|angleX|。
1.1 换一种说法
以X轴正方向(右)为零度方向,X轴逆时针转是正角度,顺时针转是负角度,角度的取值范围是[-90, 90]。
度数的绝对值是X轴绕旋转矩形框的长边旋转得到的。度数的符号是根据是顺时针旋转还是逆时针旋转确定的。度数值域是[-90,90]。
假设X轴绕长边逆时针旋转与长边重合时的度数是θ。如果θ小于90度那么输出的角度就是θ;
如果θ大于90度那么角度是负值,度数的绝对值应该是X轴绕长边顺时针旋转与长边重合时的度数(也等于180减去X轴绕长边逆时针旋转的度数)。
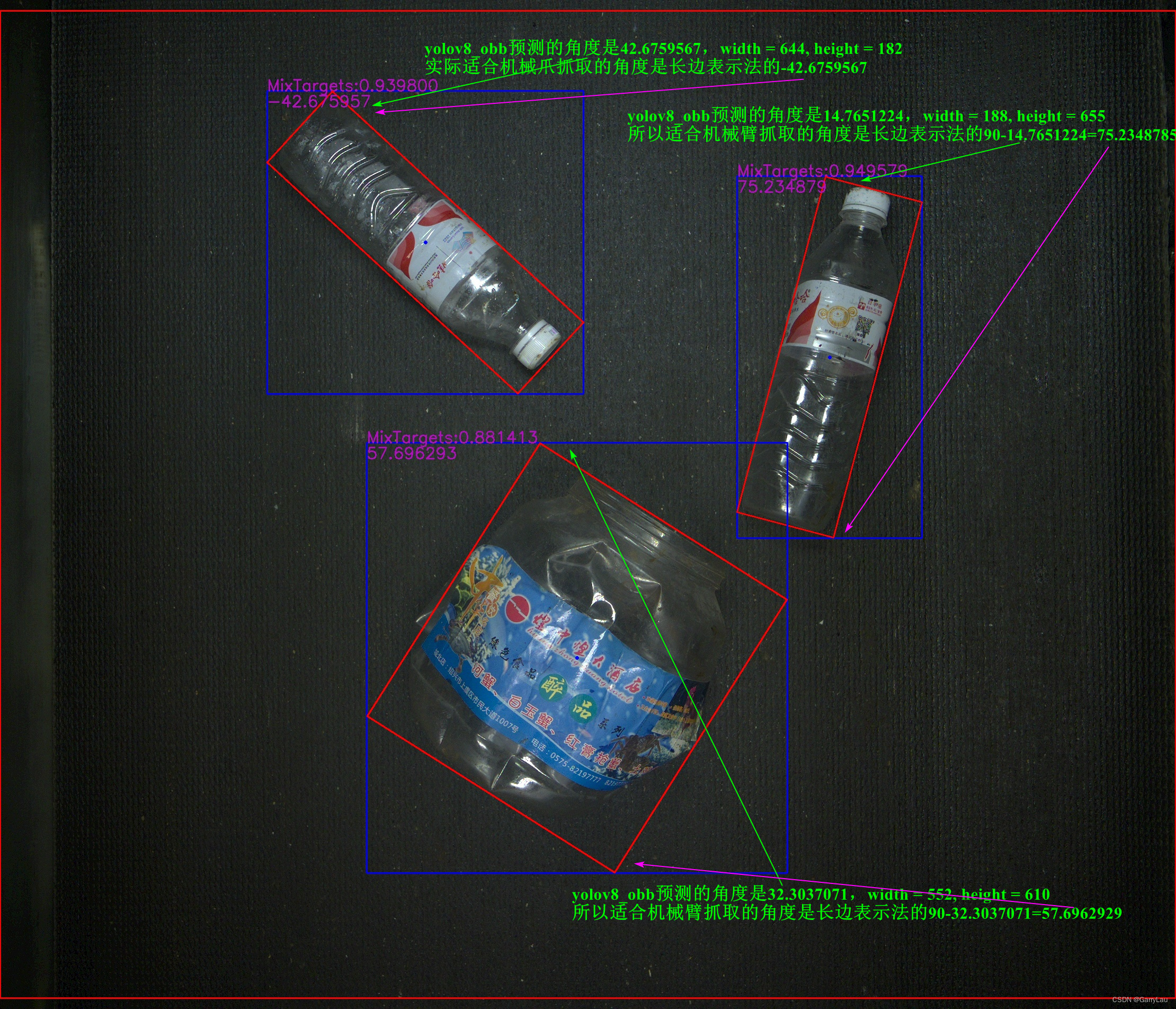
2. yolov8旋转目标检测输出的角度
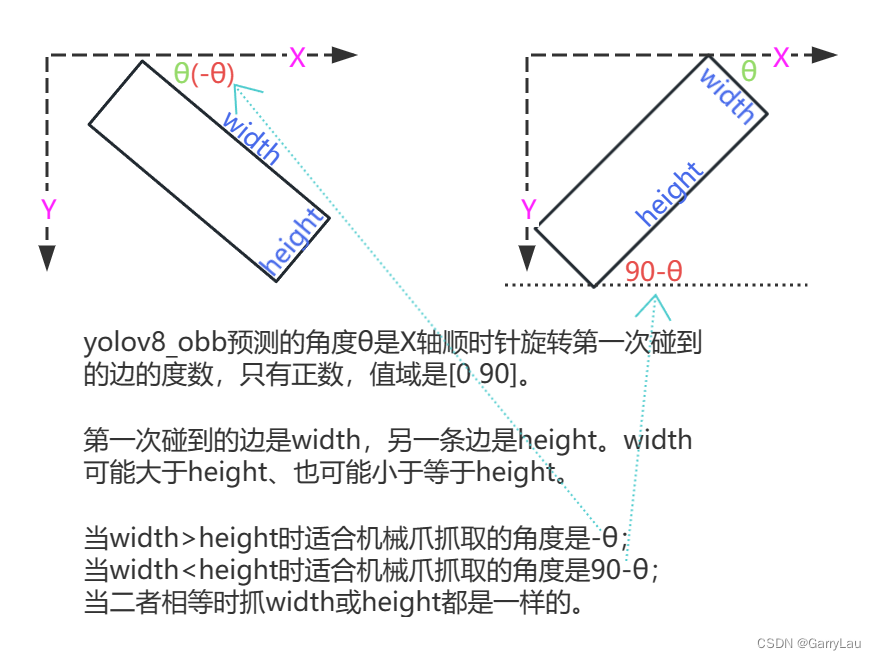
yolov8_obb预测的角度θ是X轴顺时针旋转第一次碰到的边的度数,只有正数,值域是 【待确认】。[0 90]
第一次碰到的边是width,另一条边是height。width可能大于height、也可能小于等于height。
A. 当width > height时适合机械爪抓取的角度是-θ;
B. 当width < height时适合机械爪抓取的角度是90-θ;
C. 当二者相等时抓width或height都是一样的。
2.1 将yolov8_obb预测的角度转换为适合机械爪抓取的角度