什么是sobel算子?
Sobel 算子是一种常用的边缘检测算子,用于在图像中检测边缘。它基于对图像进行梯度运算,可以帮助识别图像中灰度值变化较大的区域,从而找到图像中的边缘。
Sobel 算子通过计算图像的水平和垂直方向的一阶导数来识别边缘。具体来说,Sobel 算子使用了一个 3×3 的卷积核,分别对图像进行水平和垂直方向上的卷积运算,得到两个梯度图像,即水平梯度图像和垂直梯度图像。然后,将这两个梯度图像合并成一个梯度幅值图像,其中每个像素的幅值表示该点的梯度大小。
Sobel 算子的优点包括简单易实现、计算速度快、对噪声具有一定的抗干扰能力等。因此,它被广泛应用于图像处理中的边缘检测任务,例如目标检测、图像分割、特征提取等。

sobel算子边缘提取的步骤
Sobel 算子边缘提取的步骤如下:
-
灰度化: 首先将彩色图像转换为灰度图像。这是因为 Sobel 算子通常应用于灰度图像,因为它更容易处理且计算速度更快。
-
计算水平和垂直方向的梯度: 对灰度图像分别应用水平和垂直方向的 Sobel 算子。Sobel 算子使用一个 3×3 的卷积核对图像进行卷积操作,分别得到水平方向上的梯度图像和垂直方向上的梯度图像。
-
合并梯度图像: 将水平和垂直方向上的梯度图像合并成一个梯度幅值图像。合并的方法通常是计算每个像素点的梯度幅值,即水平和垂直方向上的梯度的平方和的平方根。
-
阈值处理: 对梯度幅值图像进行阈值处理,将梯度幅值大于某个阈值的像素点视为边缘像素,其余像素视为非边缘像素。这一步可以帮助去除噪声并将边缘区域分割出来。
-
边缘检测结果: 最终得到的图像即为 Sobel 算子边缘提取的结果,其中白色像素表示边缘像素,黑色像素表示非边缘像素。
总的来说,Sobel 算子边缘提取的步骤包括灰度化、计算梯度、合并梯度图像和阈值处理。这些步骤可以帮助识别图像中的边缘,并将其提取出来。
Sobel 算子
常用的 Sobel 算子是一个 3×3 的卷积核,分别包含水平方向和垂直方向上的两个卷积核。这两个卷积核分别对图像进行水平方向和垂直方向上的卷积运算,从而得到图像的梯度信息。
具体来说,常用的 Sobel 算子如下:
水平方向上的 Sobel 算子:
-1 0 1-2 0 2-1 0 1
垂直方向上的 Sobel 算子:
-1 -2 -10 0 01 2 1
这两个卷积核分别对图像进行水平方向和垂直方向上的卷积运算,得到水平方向和垂直方向上的梯度图像。然后,通过将这两个梯度图像合并,可以得到图像的梯度幅值图像,其中每个像素的幅值表示该点的梯度大小。
python实现运用sobel算子进行边缘提取的源码
PotatoPie 4.0 实验教程(28) —— FPGA实现sobel算子对摄像头图像进行边缘提取-Anlogic-安路论坛-FPGA CPLD-ChipDebug
MATLAB实现运用sobel算子进行边缘提取的源码
PotatoPie 4.0 实验教程(28) —— FPGA实现sobel算子对摄像头图像进行边缘提取-Anlogic-安路论坛-FPGA CPLD-ChipDebug
这段代码实现了读取彩色原图,转换为灰度图,并使用Sobel算子进行边缘检测。最后,它显示了原始彩色图像、原始灰度图像和Sobel边缘检测结果图像。流程如下:
- 从指定路径读取名为 “Lena.jpg” 的彩色图像。
- 将彩色图像转换为灰度图像。
- 使用Sobel算子进行边缘检测,得到边缘强度图像。
- 对于每个像素,根据其在Sobel边缘强度图像中的值,确定其是否为边缘。
- 将确定为边缘的像素值设置为1,其余像素值设置为0,得到二值化的边缘检测结果图像。
- 显示原始彩色图像、原始灰度图像和Sobel边缘检测结果图像,以便进行比较和分析。
效果图

FPGA工程分析
FPGA工程层次图
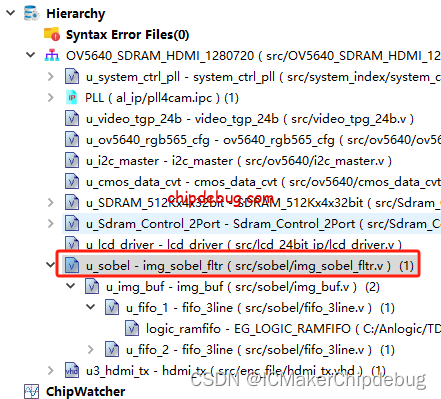
与demo18相比,只是多了一个img_sobel_fltr的模块,也就是下面这一段代码,在从SDRAM读出来之后,经它处理后再输出hdmi_tx模块。
img_sobel_fltr u_sobel(.i_clk(clk_pixel),.i_rst_n(sys_rst_n),.i_hs(VGA_HS),.i_vs(VGA_VS),.i_de(VGA_DE),.i_r(VGA_RGB[23:16]),.i_g(VGA_RGB[15:8] ),.i_b(VGA_RGB[7:0] ),.threshold(8'd148),.o_hs(slobe_hs),.o_vs(slobe_vs),.o_de(slobe_de),.o_r(slobe_data[23:16]),.o_g(slobe_data[15:8] ),.o_b(slobe_data[7:0] ));img_sobel_fltr模块代码分析
首先例化一个图像缓冲模块,用于将图像从一个时钟一个像素转为一次输出三行三列9个像素。
代码为了简化示例,仅对RGB像素的G通道进行了sobel处理,实际上是需要先对图像滤波(比如高斯滤波滤除白噪声),然后进行灰度化处理,再然后再进行sobel运算,最后依据阈值进行二值化处理。
// 实例化图像缓存模块img_buf u_img_buf (.i_clk(i_clk),.i_rst_n(i_rst_n),.i_de(i_de),.i_data(i_g),.o_de(),.o_p11(g_p11),.o_p12(g_p12),.o_p13(g_p13),.o_p21(g_p21),.o_p22(g_p22),.o_p23(g_p23),.o_p31(g_p31),.o_p32(g_p32),.o_p33(g_p33));然后对每9个像进行一次soble运算,分别进行X方向和Y方向的计算,在代码中有详细注释讲解sobel运算在FPGA中的实现和优化方法。
最后对代码进行阈值比较,输出二值图
管脚约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
时序约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
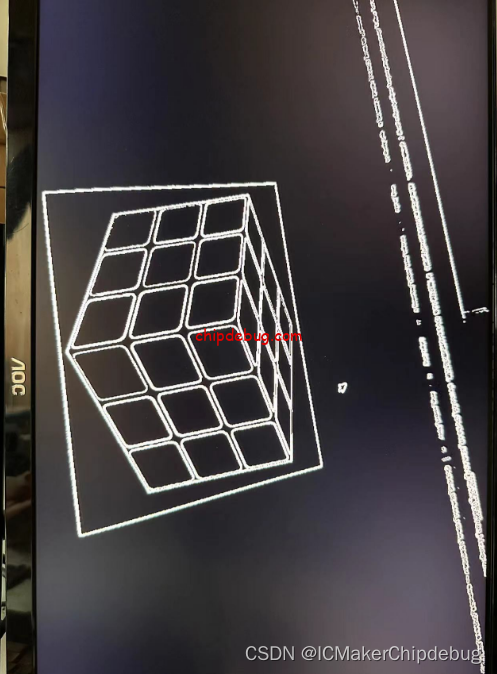
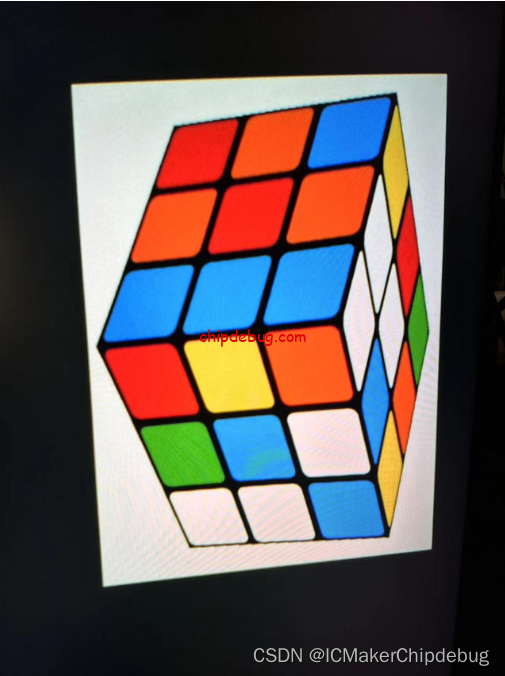
实验结果图
原图
阈值为189时的边缘提取图
有部分细节丟失了,可以调节阈值参数来恢复。

阈值为149时的边缘提取图