本文介绍九点标定方法
已知 9 个点的图像坐标和对应的机械坐标,直接计算转换矩阵,核心原理即最小二乘拟合
{𝑥′=𝑎𝑥+𝑏𝑦+𝑐𝑦′=𝑎′𝑥+𝑏′𝑦+𝑐′
[𝑥1𝑦11𝑥2𝑦21⋮⋮⋮𝑥9𝑦91][𝑎𝑎′𝑏𝑏′𝑐𝑐′]=[𝑥1′𝑦1′𝑥2′𝑦2′⋮⋮𝑥9′𝑦9′]
准备两张图,一张用来校正,一张用来测试
校正图,圆直径 1.5cm,圆心距 2cm

测试图,圆直径 2cm,圆心距 3cm

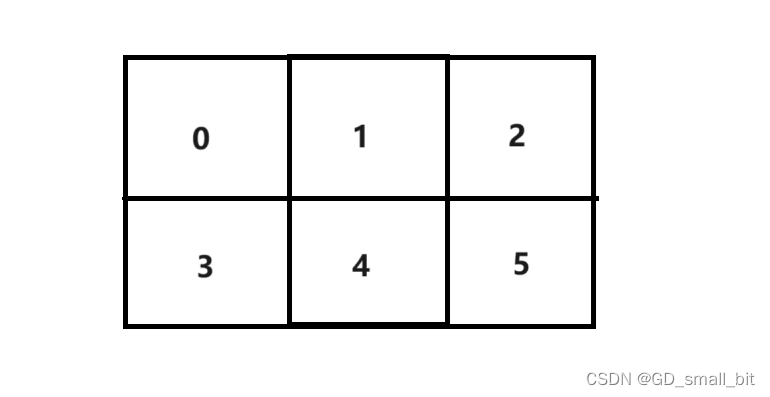
图像坐标系和机械坐标定义如
已知 9 个点的图像坐标和对应的机械坐标,直接计算转换矩阵,核心原理即最小二乘拟合
{𝑥′=𝑎𝑥+𝑏𝑦+𝑐𝑦′=𝑎′𝑥+𝑏′𝑦+𝑐′
[𝑥1𝑦11𝑥2𝑦21⋮⋮⋮𝑥9𝑦91][𝑎𝑎′𝑏𝑏′𝑐𝑐′]=[𝑥1′𝑦1′𝑥2′𝑦2′⋮⋮𝑥9′𝑦9′]
准备两张图,一张用来校正,一张用来测试
校正图,圆直径 1.5cm,圆心距 2cm
测试图,圆直径 2cm,圆心距 3cm
图像坐标系和机械坐标定义如
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/330875.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!