目录
概述
1 硬件介绍
1.1 整体硬件结构
1.2 模块功能介绍
2 测速框架介绍
2.1 测速原理
2.2 软件框架结构
3 使用STM32Cube配置Project
3.1 准备环境
3.2 配置参数
3.3 生成Project
4 功能实现
4.1 电机控制代码
4.2 测试代码
4.3 速度计算
5 测试
5.1 编写测试代码
5.2 运行代码
电机测速功能
概述
本文主要介绍使用外部IO中断和内部定时器,实现电机转速的测试功能。笔者基于码盘和光电测速传感器,使用STM32F103内部定时器的功能,完成测试功能设计。文章介绍其实现原理,设计方法,并基于STM32Cube软件配置参数和生成工程。完成所有的软硬件功能。
1 硬件介绍
1.1 整体硬件结构
光电测试器位置

测速码盘位置

1.2 模块功能介绍
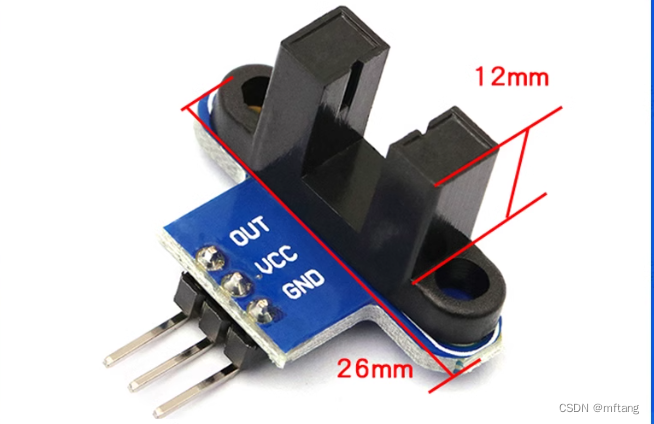
1)测试传感器
工作原理:
当模块中的槽无遮挡时,接收管导通,DQ输出为低电平
当槽被遮挡时,DQ输出为高电平。
2)码盘
该码盘一周总共有20个孔,则其将一个圆分为20个等分,在测速的时候。只需记录其在1s时间内走过孔的个数,然后通过轮胎的周长与孔等分的关系,就能计算出速度。

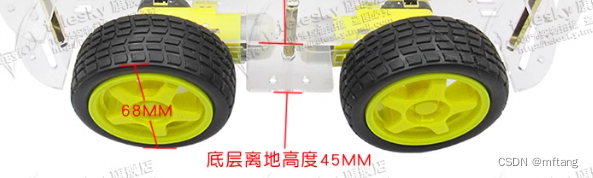
3)轮胎参数
根据参数可得,轮胎的直径为:6.8cm
2 测速框架介绍
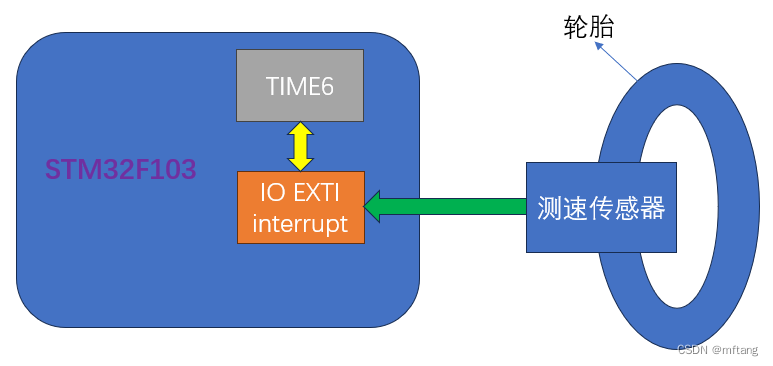
2.1 测速原理
1)IO EXIT: 输入性IO中断,当有脉冲发生时,会产生一个外部中断,在该中断的回调函数中实现计数功能,没进入一次中断,计数加1。
2)TIME6:实现1ms的定时功能,在其内部实现一个1s计数功能,当计数count=1000时,此时计时时间为1s,读取IO EXIT中的计数值。
3)根据计数值和轮胎的周长,就可以计算出转速值
2.2 软件框架结构
3 使用STM32Cube配置Project
3.1 准备环境
| 软件名称 | 版本信息 |
|---|---|
| STM32Cube | STM32CubeMX 6.11 |
| STM32 HAL | STM32Cube_FW_F1_V1.8.5 |
3.2 配置参数
1)配置外部IO中断,设置为上升沿触发模式

2) 配置计数定时器,定时中断触发时间为1ms
 3)PWM输出配置
3)PWM输出配置
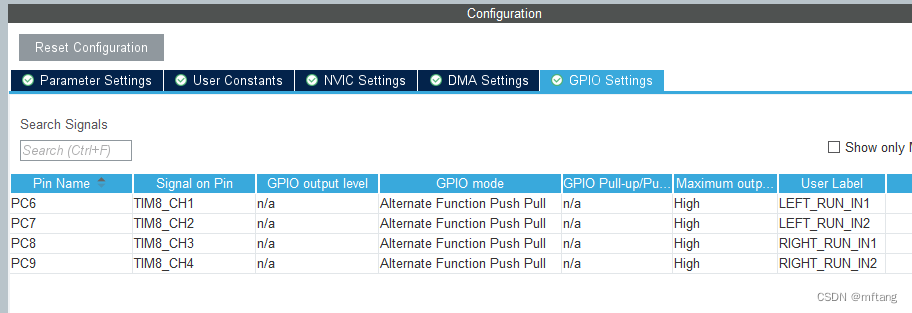
输出端口配置
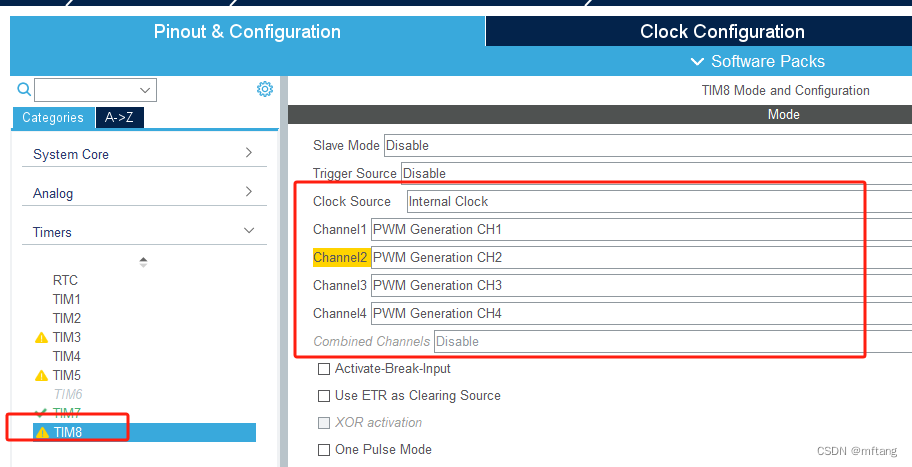
IO端口配置
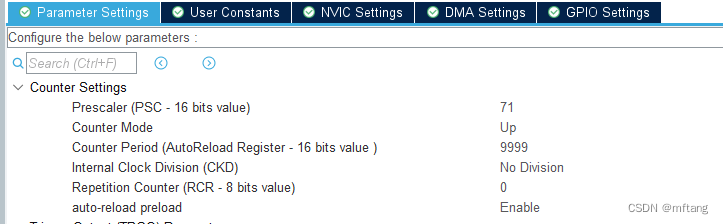
 PWM相关的参数
PWM相关的参数
PWM CH1 ~ CH4端口参数,每个端口参数相同,笔者以CH1为例,介绍参数配置

3.3 生成Project
配置完成参数后,点击GENERATE生成工程,打开文件如下:

4 功能实现
4.1 电机控制代码
笔者使用PWM控制电机转速,CH1和CH2控制电机的转向,所以需要配置这两个输出端口的输出特性。其实现代码如下:
void pwm_ctrl_Init( void )
{HAL_TIM_Base_Start( &htim8 );HAL_TIM_PWM_Start( &htim8, TIM_CHANNEL_1);HAL_TIM_PWM_Start( &htim8, TIM_CHANNEL_2);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_1);HAL_TIM_SetPWM_Pulse( 2000, TIM_CHANNEL_2);
}4.2 测试代码
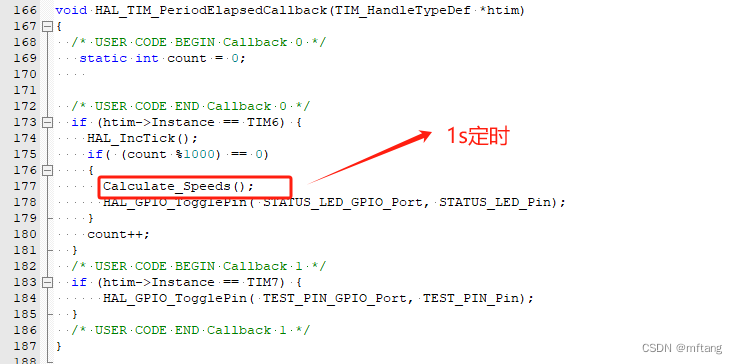
在外部中断回调函数中实现计数功能。在定时器计数到1s的时刻,记录下该值,用于计算转速。
static uint32_t trg_cn = 0;void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if( GPIO_Pin == INPUT_TRIGGER_Pin){trg_cn++;}
}void Calculate_Speeds( void )
{printf("run count: %d \r\n", trg_cn);trg_cn = 0;
}4.3 速度计算
已知参数如下:
轮胎直径(R): 6.8 cm
码盘细分数(一个周长):20个间隔
1s时间内的码盘间隔数目:CNT
转速v = (π*R)/20 * CNT ( cm )
代码实现:
/* USER CODE BEGIN 0 */
#define PI 3.14159
#define R 6.8 // unit: cm
#define DIV_CNT 20static uint32_t trg_cn = 0;
/* USER CODE END 0 */float calculate_speeds( uint32_t cnt )
{float speeds;speeds = ((PI*R)/20) * cnt;return speeds;
}打印数据函数
void Calculate_Speeds( void )
{float speeds;speeds = calculate_speeds( trg_cn );printf("run count: %d, speeds: %0.3f cm/s\r\n", trg_cn, speeds);trg_cn = 0;
}5 测试
5.1 编写测试代码
在定时器的回调函数中调用打印计数函数:void Calculate_Speeds( void )
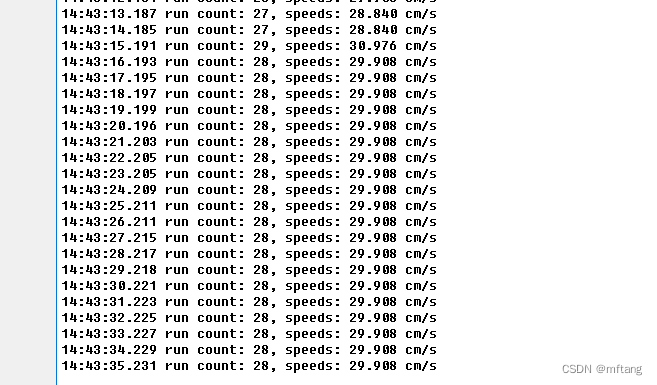
5.2 运行代码
使用串口将测试出来的数据打印出来,在PC山使用串口终端接收数据。
测试硬件结构