USART串口数据包
先来看两张图,本次程序是串口收发HEX数据包,第二种是串口收发文本数据包,之后两个图,展示的就是接收数据包的思路。
在PB1这里接了一个按键,用于控制。在串口助手,在发送模式和接收模式都选择HEX模式。
在OLED显示这样的数据包,在串口助手这,也显示接收到了这个数据包。
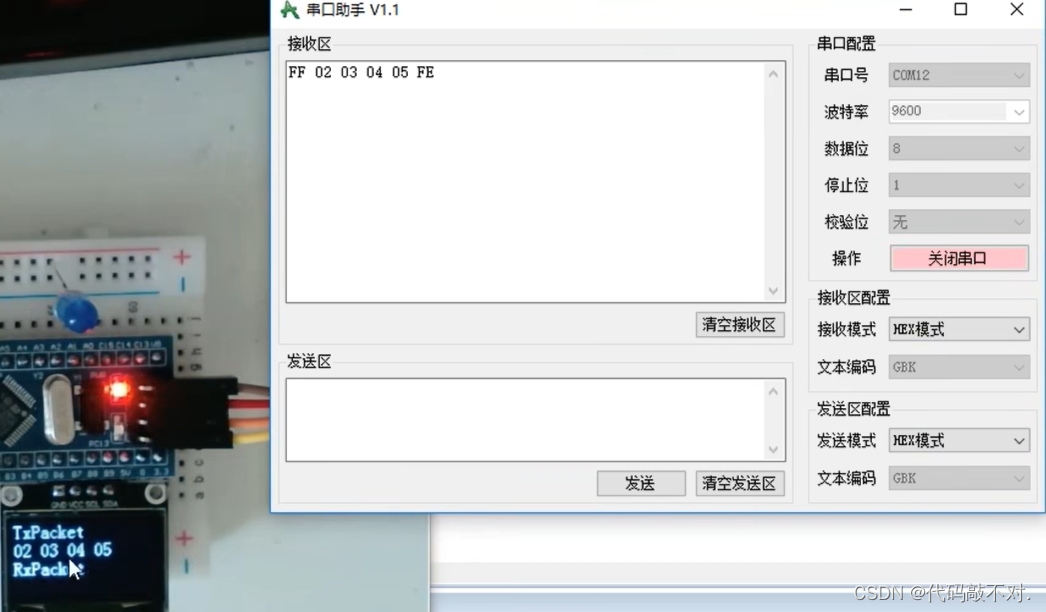
这个数据包有个规定的格式,就是以FF为包头,FE为包尾,中间固定4个字节为数据,这是STM32发送数据包。
STM32发送数据包:可以在串口助手的发送区,发送一个数据包给STM32,也是同样的格式,以FF开头,中间4个数据为用户数据,最后以FE结尾。
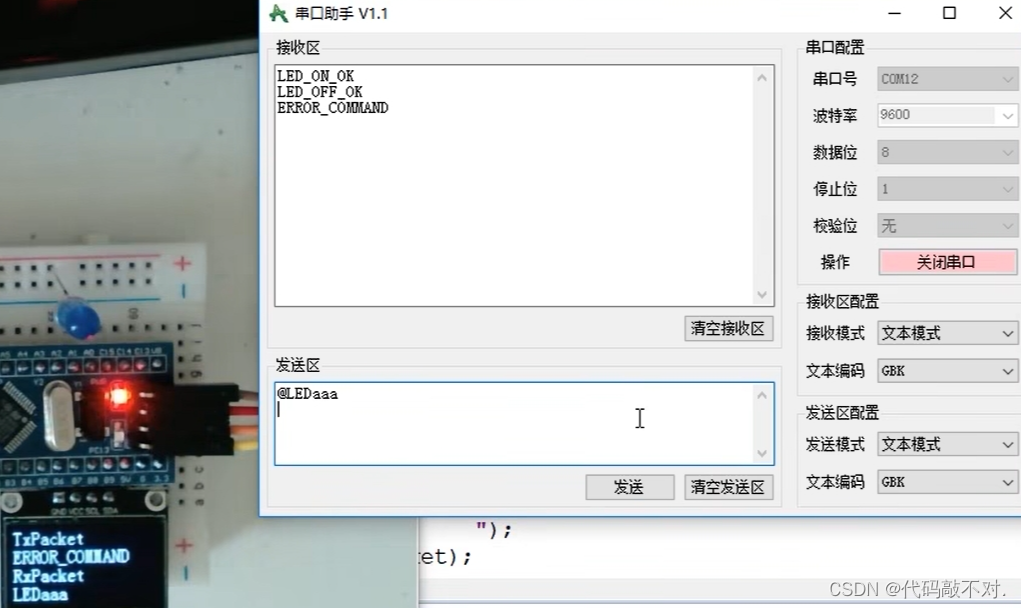
第二个程序串口收发文本数据包:在串口助手这的发送模式和接收模式都选择文本模式,这个程序我们要发送一个文本数据包,数据包的格式也是个人规定的,此次规定的是,以@符号为包头,中间是数据,如,@LED_ON ,数据也是规定好的指令,最后以换行符为包尾。
可以看到OLED显示接收到了LED_ON,led点亮,然后STM32回传一个字符串LED_ON_OK。如随便给个指令,STM32也能收到,但是返回ERROR_COMMAND,错误指令。
HEX数据包

先看—下HEX数据包格式。首先数据包是一种将单独的数据打包起来,整体进行传输的方式,方便进行多字节的通信。在实际应用中,可能需要把多个字节打包成一个整体进行发送。
比如说,我们有个陀摆仪传感器,需要用串口发送数据到STM32,陀螺仪的数据,比如X
轴一个字节、Y轴一个字节、Z轴一个字节,总共3个数据,需要连续不断地发送,但当你像这样XYZ XYZ XYZ这样连续发送的时候,就会出现一个问题,就是接收方,三不知道这数据哪个对应X哪个对应Y、哪个对应Z。因为接收方可能会从任意位置开始接收,所以会出现数据错位的现象。
解决这个现象:就是把这个数据进行分割,把XYZ 分成一个个数据包,这样接收的时候就知道了,数据包的第一个数据是X,数据包的第二个数据是Y,数据包的第三个数据是Z,这就是数据包的任务,就是把同一批的数据进行打包和分割,方便接收方进行识别,
比如,在XYZXYZ数据流中,我们可以在数据包第一个数据,也就是x的数据包上将最高位置1作为标志位,其余数据包最高位置0,当接收到的数据后,判断一下最高位,如果是1,那就是x数据,然后紧跟着的两个数据就分別是Y和Z,这是一种分割方法。**总结:这种方法是把每个数据的最高位当做标志位来进行分割的。**实际例子:如UTF8的编码方法。
本节,讲数据包分割方法,并不是在数据的高位添加标志位这种方式,这种方式破坏了原有的数据,使用起来比较复杂。
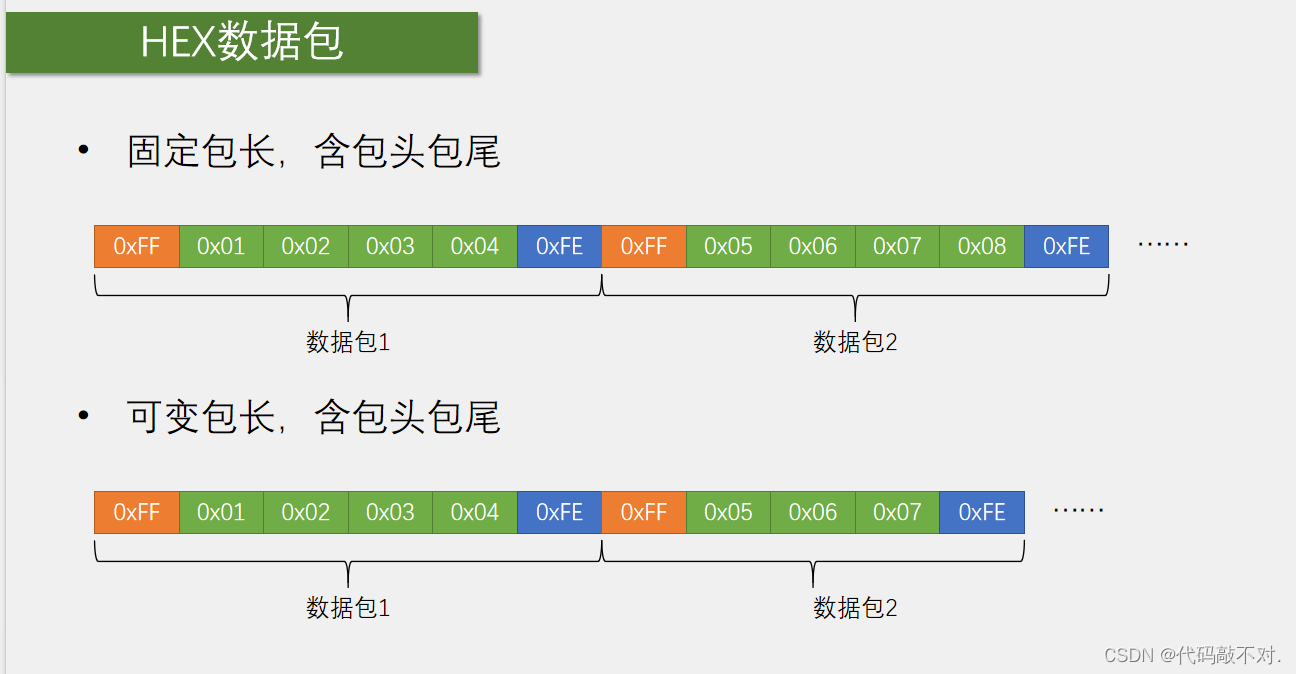
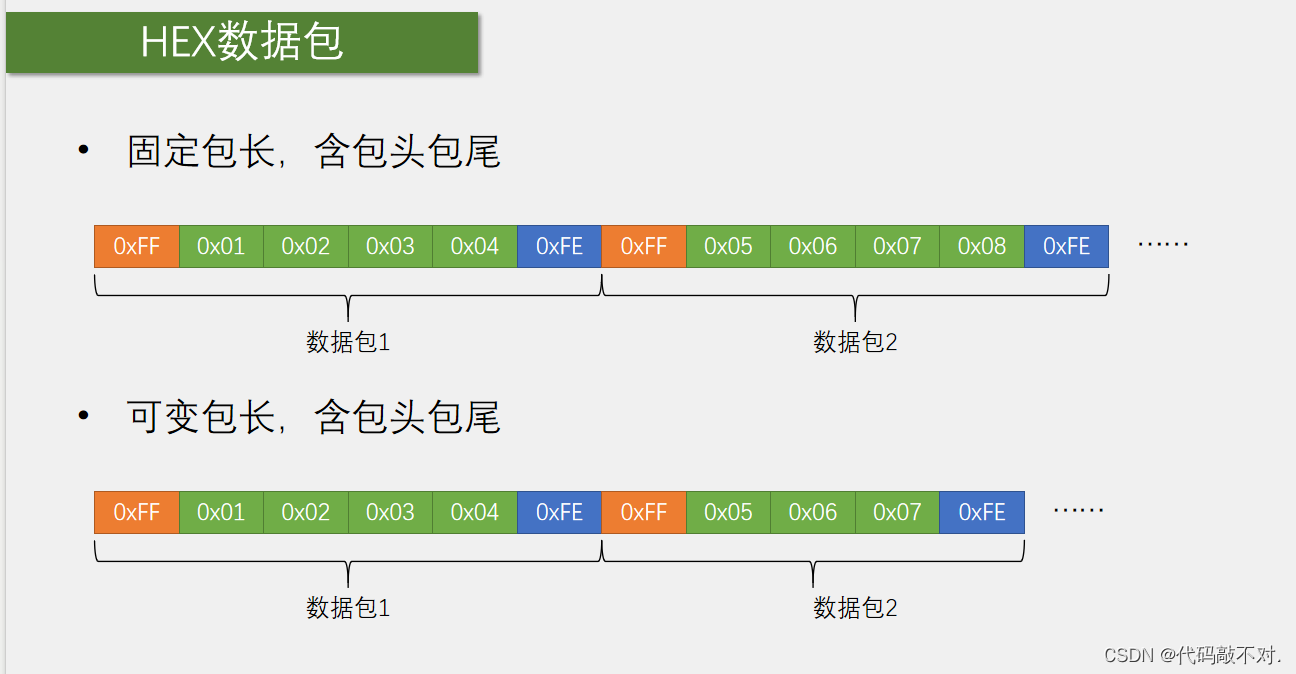
我们串口数据包,通常使用的是额外添加包头包尾的这种方式。数据包有2种格式:固定包长,就是每个数据包长度都固定不变,每个数据包前面是包头,后面是包尾。第2种是,可变包长,就是每个数据包长度可以是不一样,我们可以根据用户需求自行规定数据包格式。
例如,我们可以规定一批数据有4个字节,在4个字节之前添加包头0xFF,在之后添加包尾OXFE。当我们接收到OxFF时,就知道一个数据包来了,接萶接收到的4个字节就作为数据包的第1. 2.3.4个数据存储在数组中,最后接收到包尾OxFE时,就可以置一个标志位,告诉程序收到了一个数据包。这样就可以在一个连续不断的数据流中分割出我们想要的数据包了。这就是通过添加包头包尾实现数据分割打包的思路,
接着研究几个问题:
第一个问题:包头包尾和数据载荷重复的问题,这里定义FF为包头,FE为包尾,如果我传输的数据本身就是FF和FE怎么办呢?那这个问题确实存在,如果数据和包头包尾重复,可能会引起误判。对应这个问题我们有如下几种解决方法:
第一种,限制载荷数据的范围。如果可以的话,我们可以在发送的时候,对数据进行限幅。比如XYZ,3个数据,变化范围都可以是0~100 那就好办了,我们可以在载荷中只发送0-100的数据,这样就不会和包头包尾重复了。
第二种,如果无法避免载荷数据和包头包尾重复,那我们就尽量使用固定长度的数据包。这样由于载荷数据是固定的,只要我们通过包头包尾对齐了数据,我们就可以严格知道,哪个数据应该是包头包尾,哪个数据应该是载荷数据。
在接收载荷数据的时候,我们并不会判断它是否是包头包尾,而在接收包头包尾的时候,我们会判断它是不是确实是包头包尾,用于数据对齐。这样,在经过几个数据包的对齐之后,剩下的数据包应该就不会出现问题了。
第三种,增加包头包尾的数量,并且尽量让它呈现出载荷数据出现不了的状态。比如我们使用FF、FE作为包头,FD、FC作为包尾,这样也可以避免载荷数据和包头包尾重复的情况发生。
第二个问题:这个包头包尾并不是全部都需要的,比如我们可以只要一个包头,把包尾删掉,这样数据包的格式就是,一个包头FF,加4个数据,这样也是可以的。
当检测到FF,开始接收,收够4个字节后,置标志位,一个数据包接收完成,这样也可以。不过这样的话,载荷和包头重复的问题会更严重一些,比如最严重的情况下,我载荷全是FF,包头也是FF,那你肯定不知道哪个是包头了,而加上了FE作为包尾,无论数据怎么变化,都是可以分辨出包头包尾的。
第三个问题:固定包长和可变包长的选择问题。
对应HEX数据包来说,如果你的载荷会出现和包头包尾重复的情况,那就最好选择固定包长,这样可以避免接收错误。如果你又会重复,又选择可变包长那数据很容易就乱套了。
如果载荷不会和包头包尾重复,那可以选择可变包长,数据长度,像这样,4位、3位、等等,1位、10位,来回任意变,肯定都没问题。因为包头包尾是唯一的,只要出现包头,就开始数据包,只要出现包尾,就结束数据包,这样就非常灵活了,这就是固定包长和可变包长选择的问题。
第四个问题:各种数据转换为字节流的问题。这里数据包都是一个字节一个字节组成的,如果你想发送16位的整型数据、32位的整型数据,float、double,甚至是结构体,其实都没问题,因为它们内部其实都是由一个字节一个字节组成的,只需要用一个uint8_t的指针指向它,把它们当做一个字节数组发送就行了。
文本数据包
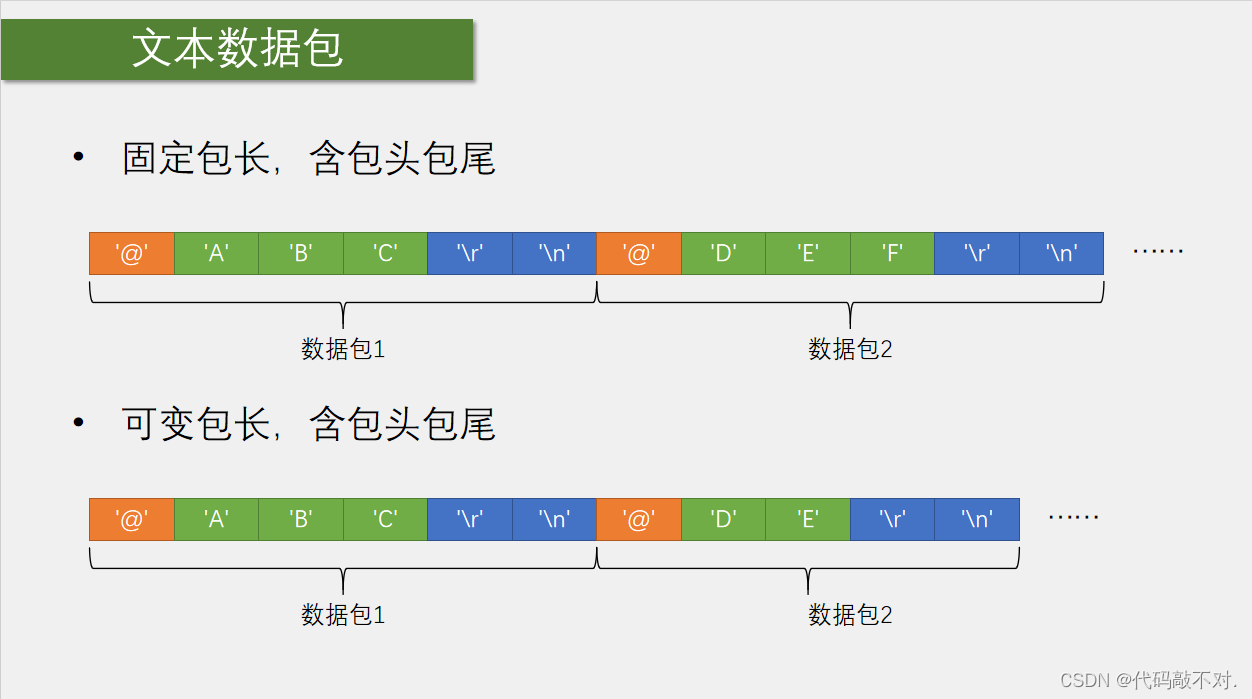
这里我同样介绍了固定包长和可变包长这两种模式。由于数据被译码成字符形式,因此存在大量字符可以作为包头和包尾,这可以有效避免载荷和包头包尾重复的问题。
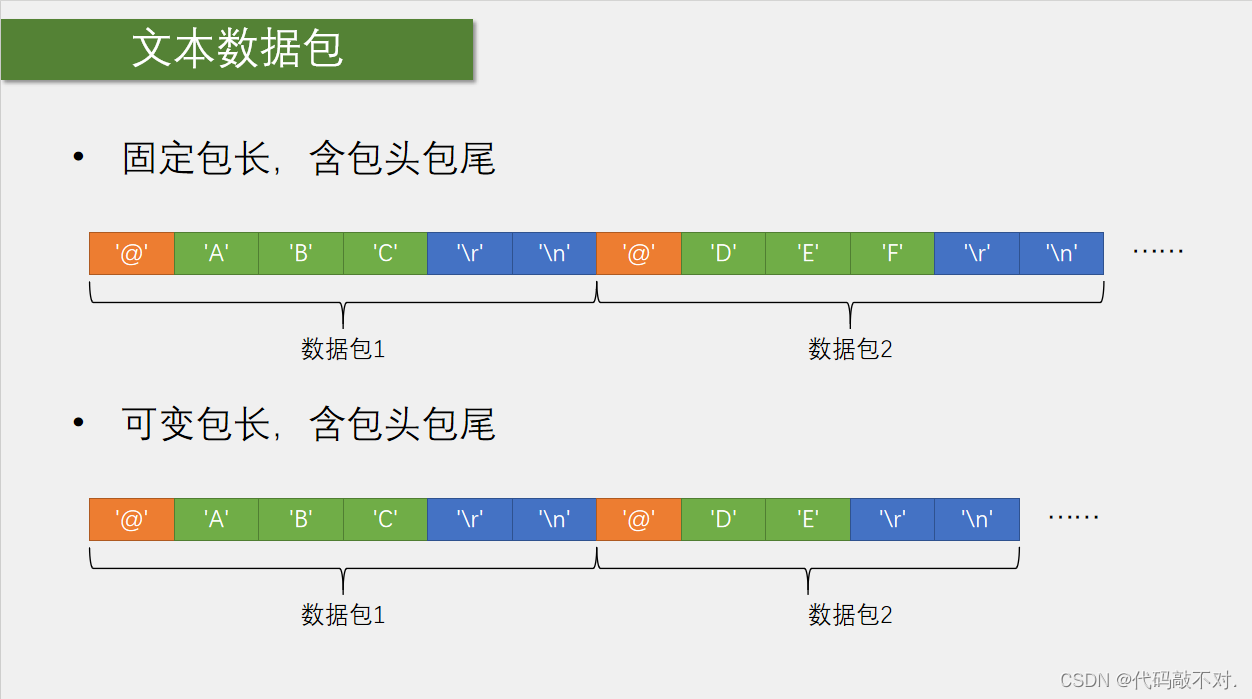
例如,以@字符作为包头,以’\r’ '\n’换行符作为包尾,在载荷数据中间允许出现除了包头包尾外的任意字符。这样,文本数据包不用担心载荷和包头包尾重复的问题,使用非常灵活。无论是可变包长还是各种字母、符号、数字,都可以随意使用。
当我们接收到载荷数据时,得到的是一个字符串。在软件中对字符串进行操作和判断,可以实现各种指令控制的功能。此外,字符串数据包的表达意义明显,可以把字符串数据包直接打印到串口助手上,很明显能看出指令和数据。所以这个文本数据包,通常以换行作为包尾,文本数据包通常以
便在打印时逐行显示。
对比HEX数据包和文本数据包,各有优缺点。HEX数据包的优势在于,传输最直接,解析数据简单,适合一些模块发送原始数据,比如使用串口通信的陀摆仪,温温度传感器。其缺点灵活性不足,载荷容易和包头包尾重复。
文本数据包的优点在于,数据直观易于理解,比较适台输入指令进行人机交互的场合。
例如,蓝牙模块常用的AT指令、CNC和3D打印机常用的G代码都是文本数据包的格式,然而,其缺点是解析效率低。
例如,发送数字100时,HEX数据包只需一个字节100即可,而文本数据包则需要三个字节的字符’1,“0,0。收到后还需字符转换为,数据才能得到100。所以,需要根据实际场景来选择和设计数据包格式。数据包格式定义。
数据包收发流程
首先,发送数据包的过程相对简单。在发送HEX数据包时,可以通过定义一个数组,填充数据,然后使用之前我们写过的SendArray函数发送即可。
在发送文本数据包时,可以通过写一个字符串,然后调用SendString函数发送。因此,发送数据包的过程是可控的,我们可以根据需要发送任何类型的数据包。
接收一个数据包,比较复杂了,这里是固定包长HEX数据包的接收方法,和可变包长文本数据包的接收方法,其他的数据包也都可以套用这个形式,等会儿我们写程序就会根据这里面的流程来。
我们先看一下如何来接收这个固定包长的HEX数据包。要接收固定包长的HEX数据包,我们需要设计一个状态机来处理。根据之前的代码,我们知道每当收到一个字节,程序会进入中断。在中断函数里,我们可以获取这个字节,但获取后需要退出中断。因此,每个收到的数据都是独立的过程,而数据包则具有前后关联性,包括包头、数据和包尾。为了处理这三种状态,我们需要设计一个能够记住不同状态的机制,并在不同状态下执行不同的操作,同时进行状态合理转移。这种程序设计思维就是“状态机”。
在这里我们就使用状态机的方法来接收—个数据包,要想设计一个好的状态机程序,画一个这样的状态转移因是必要的。
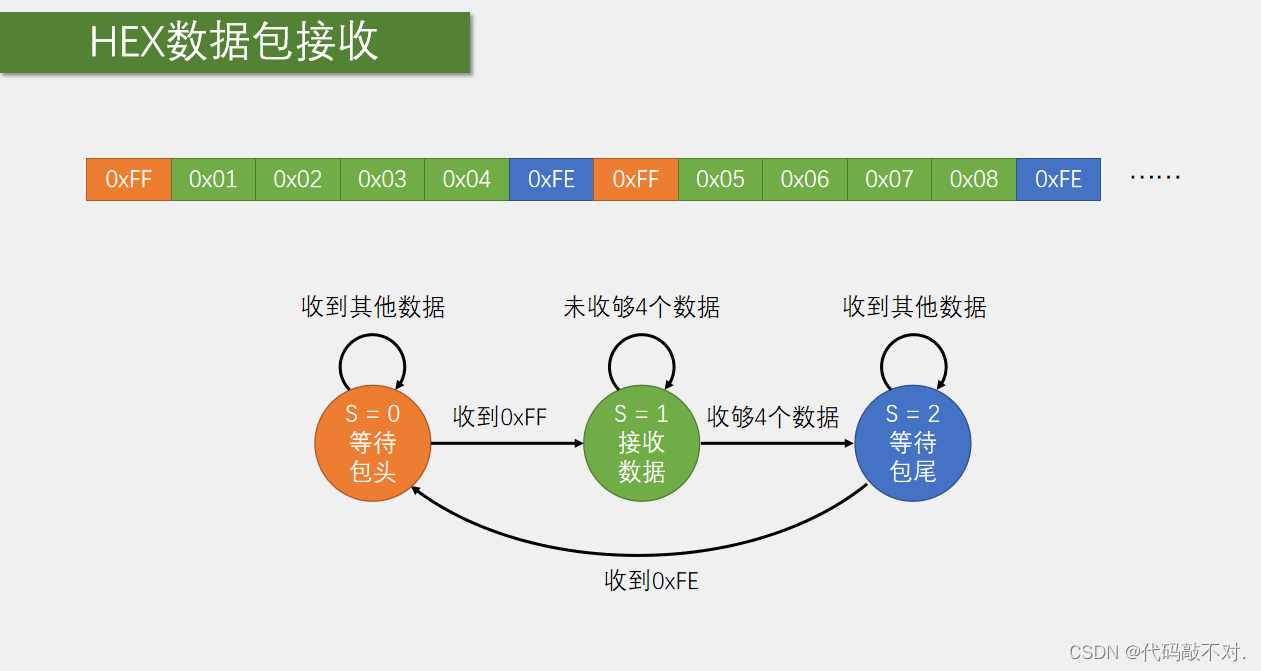
我们看一下,对于下面这样—个固定包长HEX数据包来说,我们可以定义3个状态,第一个状态是等待包头,第二个状态是收数据,第三个状志是等待包尾,每个状态需要用一个变量来标志一下,比如我这里用变量S来标志,三个状态依次为S=0 S=1 S=2,这一点类似于置标志位,只不过标志位只有0和1,而状态机是多标志位状态的一种方式。
执行流程是:
对于固定包长的HEX数据包,我们可以定义三个状态:等待包头.接收数据,等待包尾。每个状态都可以用一个变量来标志,例如变量S来表示。这三个状态可以依次定义为S=0、 S=1. S=2。类似于置标志位,但标志位只有0和1,而状态机允许多标志位状态。
初始时,S=0表示等待包头状态。当中断发生时,根据S=0的状态,程序会进入等待包头的逻辑。判断数据是不是包头FF,如果收到的数据是FF(包头),则将状态设置为S=1并退出中断。下次再进中断,然后根据S=1的状态,进行接收数据的程序。如果收到的不是FF,就证明数据包没有对齐,那么需要继续等待包头出现,状态保持为S=0。下次中断,还是判断包头的逻辑,直到出现FF,才能转到下一个状态。
当收到FF(包头)后,状态会转移到S=1(接收数据状态)。在此状态下,接收到的数据会被存储在数组中,并记录己收到的数据数量。如果没接收到4个数据,就一直是接收状态,当收到4个数据后,将状态设置为S=2(等待包尾状态)。
在等待包尾状态下(S=2),判断数据是不是FE, 程序会等待收到FE(包尾)。如果收到FE,则将状态重置为S=0(等待包头状态),开始下一个数据包的接收,开启轮回 。如果收到的不是FE,那么需要进入重复等待包尾的状态,直到接收到真正的包尾。
这就是使用状态机接收数据包的思路。这个状态机其实是一种很广泛的编程思路,在很多地方都可以用到,使用的基本步骤是,先根据项目要求定义状态,画几个圈,然后考虑好各个状态在什么情况下会进行转移,如何转移,画好线和转移条件,最后根据这个图来进行编程,这样思维就会非常清晰了。
文本数据包
同样也是利用状态机,定义3个状态。第一个状态,等待包头,判断收到的是不是我们规定的⑨符号,如果收到@,就进入接收状态,在这个状态(S=1)下,依次接收数据,同时,这个状态还应该要兼具等待包尾的功能。因为这是可变包长,我们接收数据的时候,也要时刻监视.是不是收到包尾了,一但收到包尾了,就结束。
那这里(S=2),这个状态的逻辑就应该是,收到一个数据,判断是不是\r,如果不是,则正常接收,如果是,则不接收,同时跳到下一个状态,等待包尾\n,因为我这里数据包有两个包尾\r\n,所以需要第三个状态,如果只有一个包尾,那在出现包尾之后,就可以直接回到初始状态了,只需要两个状态就行,因为接收数据和等待包尾需要在一个状态里同时进行,由于串口的包头包尾不会出现在数据中,所以基本不会出现数据错位的现象,这就是使用状态机接收文本数据包的方法









![[有监督学习]2.详细图解正则化](https://img-blog.csdnimg.cn/direct/c2dd597e67e347308c806d8f54cfda18.png)