一、选择题(20)
二·、判断题(10)

三、填空题(10)
- 主机-目标机的文件传输方式主要有串口传输方式、网络传输方式、USB接口传输方式、JTAG接口传输方式、移动存储设备方式。
- 常用的远程调试技术主要有 插桩/stub、片上调试
- 字符设备驱动程序编写通常都要涉及到三个重要的内核数据结构,分别是file_operations结构体、inode结构体和file结构体。
四、简答题(30)
-
比较嵌入式系统与通用计算机的区别。
解答:
嵌入式系统是以计算机技术为基础,并且软硬件是可裁剪的专用计算机系统。“嵌入式”、“专用性”和“计算机系统”是嵌入式系统的三个基本要素,其软件和硬件可以根据需要进行添加或减少。
而通用计算机则是包含了所有软件和硬件系统的计算机系统。 -
试说明嵌入式操作系统的特点。
解答:
嵌入式操作系统,通常包括与硬件相关的底层驱动软件、系统内核、设备驱动接口、通信协议、图形界面、标准化浏览器等。嵌入式操作系统具有通用操作系统的基本特点,如能够有效管理越来越复杂的系统资源;能够把硬件虚拟化,使得开发人员从繁忙的驱动程序移植和维护中解脱出来;能够提供库函数、驱动程序、工具集以及应用程序。与通用操作系统相比较,嵌入式操作系统在系统实时高效性、硬件的相关依赖性、软件固态化以及应用的专用性等方面具有较为突出的特点。 -
中断处理经过了哪几个阶段?
解答:
(1)保护断点现场;
(2)查找、识别中断源;
(3)执行终断处理子程序;
(4)恢复现场和退出中断。 -
试叙述嵌入式最小系统的组成,并说明各部件的作用。
解答:
一个 ARM 最小系统一般包括:
(1) ARM 微处理器芯片,这是嵌入式最小系统的心脏。
(2)电源电路、复位电路,晶振电路,为嵌入式最小系统提供电源、提供时钟信号及复位。
(3)存储器( FLASH 和 SDRAM ),微处理器芯片内部没有存储器,需要外扩存储器。
(4) UART(RS232及以太网)接口电路。这是嵌入式最小系统不可缺少的一部分,以便与外界通信联系。
(5) JTAG 调试接口。这也是不可缺少的,操作系统软件的下载与烧写都要通过它来完成。 -
在例2-1中,若把连接LED发光二极管的GPIO引脚更改为GPC0[1] ,要控制LED发光二极管点亮或熄灭,则应怎样对该端口的控制寄存器GPC0CON和数据寄存器GPC0DAT进行设置?
解答:
第6.小题图1 GPIO端口的GPC0[1]引脚连接LED发光二极管
(1)问题分析
若要使一个LED发光二极管点亮,必须有一个正向电压,即寄存器引脚端必须是低电平。反之,若要使LED发光二极管熄灭,则寄存器引脚端必须为高电平。也就是说,寄存器引脚输出低电平时,LED发光二极管点亮,寄存器引脚输出高电平时,LED发光二极管熄灭。
(2) GPC0的端口控制寄存器GPC0CON的设置
需要把GPC0CON[1]引脚设置为输出模式。按表2-3可知,GPC0CON[1] = (0001)2 。
GPC0CON的设置如下所示。
GPC0CON[4] GPC0CON[3] GPC0CON[2] GPC0CON[1] GPC0CON[0]
[19:16] [15:12] [11:8] [7:4] [3:0]0000 0000 0000 0001 0000
第6.小题图2 GPC0CON寄存器的设置
所以,设置GPC0CON[1]为输出模式的值用二进制表示为:
0000 0000 0000 0001 0000
也可以表示为:(1<<4)
即: GPC0CON = (1<<4)
(3) 端口数据寄存器GPC0DAT的设置
GPC0DAT有5位([4:0]),每一位对应一个GPIO端口引脚,当该寄存器的某位设置为1时,则对应引脚输出高电平,该寄存器的某位设置为0时,对应引脚输出低电平。
所以,在GPC0CON[1]已经设置为输出模式的前提下,GPC0DAT设置为0x01时,GPC0[1]引脚输出高电平,GPC0DAT设置为0x00时,GPC0[1]引脚输出低电平。
即:
GPC0DAT = 0x01 时,GPC0[1]引脚输出高电平,LED发光二极管熄灭;
GPC0DAT = 0x00 时,GPC0[1]引脚输出低电平,LED发光二极管点亮。
-
请问 Linux 下的文件系统和 Windows 下的文件系统有什么区别?
【解答】
Linux的文件系统是一个树结构。最顶部是/(Root根),所有文件夹、文件和驱动盘都是这个Root的分支。
Windows 下的文件系统是以驱动盘为单位的,它的每个驱动器有自己的根目录,形成的是多个树并列的结构。 -
查看Linux目录结构,说出下列目录放置的是什么数据:
【解答】
. /etc/:
该目录用来存放系统的各种配置文件,系统在启动过程中需要读取其参数进行相应的配置。
/etc/rc.d/init.d/:
存放启动、或改变运行级时运行的脚本文件及目录。
/usr/bin:
该目录用来存放用户应用程序和文件,类似于Windows下的Program Files目录。
/bin:
通常存放Linux基本操作命令的执行文件。
/sbin:
存放只能由root(系统管理员)来执行的Linux基本操作命令的执行文件。
/dev:
存放着各种外部设备的镜像文件。 -
在VMware虚拟机中建立Windows操作系统与Linux操作系统的数据共享文件目录。
【解答】
(1)安装VMware Tools工具。
(2)在Windows操作系统中创建一个共享文件夹。
(3)在Linux系统中,打开/mnt目录,可以看到其中存在一个hgfs目录。打开/mnt/hgfs目录,可以看到Windows系统的共享文件夹。 -
什么是GCC?试述它的执行过程。
【解答】
Linux系统下的GCC(GNU C Compiler)是GNU项目所推出的功能强大、性能优越的多平台编译器。
使用GCC由C语言源代码文件生成可执行文件的过程不仅仅是编译的过程,而是要经历4个相互关联的步骤∶预处理(也称预编译,Preprocessing)、编译(Compilation)、汇编(Assembly)和连接(Linking)。 -
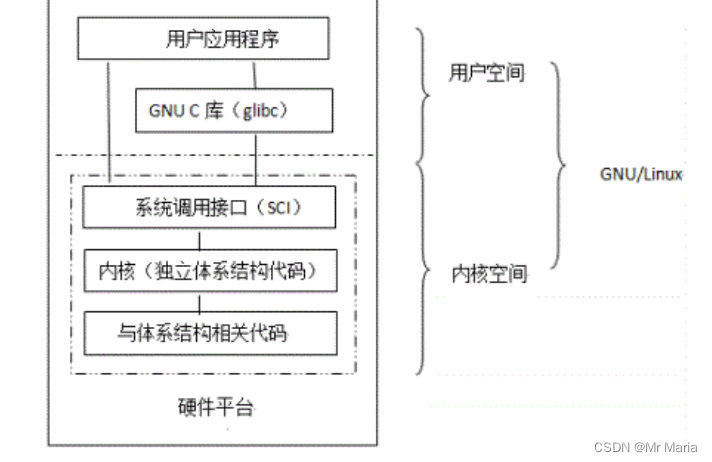
什么是内核空间,什么是用户空间?设备驱动程序运行在什么空间?
解答:
内核空间是指向内存映射的一块区域,负责内核文件的运行。
用户空间是指向内存映射的另一块区域,负责用户应用程序的运行。
设备驱动程序运行在内核空间。 -
设备驱动程序的作用是什么?
解答:
设备驱动可以理解为操作系统的一部分,它的作用就是让操作系统能正确识别和使用设备。 -
字符设备驱动程序开发的流程主要是什么?
字符设备驱动程序开发流程的步骤如下:
(1)创建设备进入点
(2)编写字符设备驱动程序
(3)编写Makefile文件,编译设备驱动程序
(4)编写用户应用程序,并编译用户程序
(5)加载设备驱动程序
(6)运行用户应用程序 -
CISC指令集相比,RISC指令集具有鲜明的特点,请你简要叙述RISC结构的主要特点。
-
GNU/Linux操作系统在嵌入式领域使用极其广泛,请画图说明GNU/Linux操作系统的基本体系结构。
-
简要叙述进程管理的基本功能
1.进程管理负责管理 CPU 资源,以便让各个进程能够以尽量公平的方式访问 CPU。
2.进程管理负责进程的创建和销毀,并处理它们和外部世界之间的连接(输入输出)。除此之外,控制进程如何共享的调度器也是进程管理的一部分。3…概括来说,内核进程管理活动就是在单个或多个CPU 上实现了多个进程的抽象 -
简单叙述文件系统的主要功能
1.对文件存储设备进行管理,分别记录空闲区和被占用区,以便于用户创建、修改以及删除文件时对空间的操作。-
2.对文件和目录的按名访问、分层组织功能。
3.创建、制除及修改文件功能。
4.数据保护功能。
5…文件共享功能。 -
判断处理器是大端还是小端
#define _CRT_SECURE_NO_WARNINGS
#include<stdio.h>
int check_sys()
{int i = 1;return *(char* (&i));//将1的地址取出来赋给char类型的指针,最后解引用就得到了想要的值//char* p = (char*)&i;//return *p;
}int main()
{int ret = check_sys();if (ret == 1)printf("小端\n");elseprintf("大端\n");return 0;
}
运行结果:
😇😇😇可以看到:vs的字节序果然就是小端类型的呢!!!
💝 方法二:通过union共用体
#define _CRT_SECURE_NO_WARNINGS
#include<stdio.h>
int check_sys()
{union Un{char c;int i;}u;u.i = 1;return u.c;
}
int main()
{int ret = check_sys();if (ret == 1){printf("小端\n");}else{printf("大端\n");}return 0;
}
- 请按要求写出一个Makefile文件,要求包括:采用交叉编译器,源文件为led8.c,目标文件为led8,使用led8.h头文件,静态编译,clean操作删除上次编译结果。
CC = arm-linux-gcc
INSTALL = install
TARGET = led8
all : $(TARGET)
$(TARGET): led8.c cortexa8.h $(CC) -static $< -o $@
clean :rm -rf *.o $(TARGET) *~
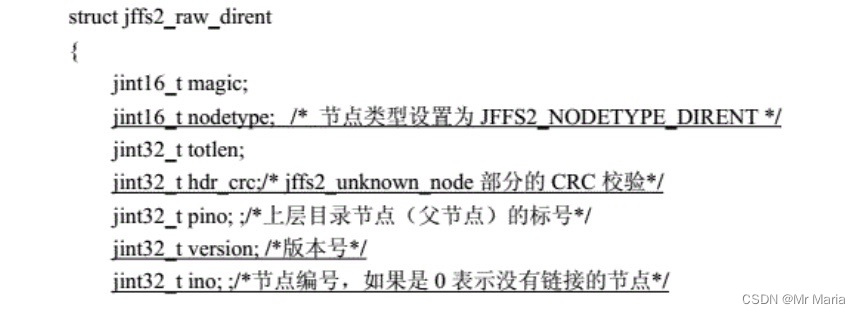
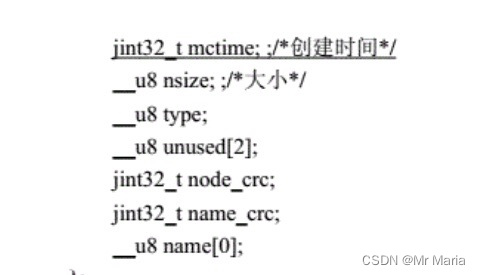
- 在嵌入式文件系统Jffs2 中,结构体 Jffs2_raw_dirent 主要包括文件名、节点 ino号、父节点ino 号、版本号、校验码等信息,它用来形成整个文件系统的层次目录结构。请对具有下划线的代码写出其注释含义。
struct jffs2_raw_dirent
jint16_t magic;
jint16 t nodetype; jint32_t totlen;
2/24页
jint32_t hdr_cre: jint32_t pino;
jint32 t version:
jint32_t ino;
jint32_t metime:
_u8 nsize;
_u8 type;
-u8 unused[2]:
jint32_t node_cre;
jint32_t name_cre;
_u8 name [0]:
]:
答:
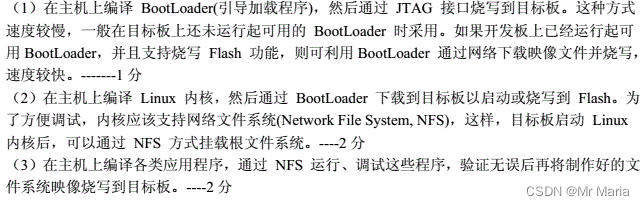
- 交叉开发模式是嵌入式系统设计中最常见的开发模式。请简要叙述交叉开发模式一般采用的步骤。
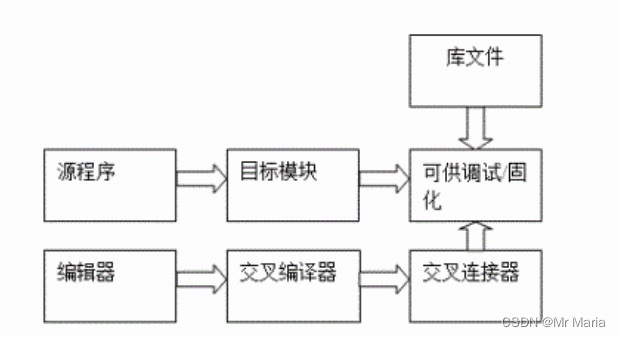
- 编译是程序处理过程中十分重要的一个环节。请以方框图的形式简述嵌入式系统的交叉编译过程。
- 设备驱动程序是应用程序和硬件之间的中间件。请简要叙述设备驱动程序主要完成的功能有?
(1)对设备初始化和释放。
(2)把数据从内核传送到硬件和从硬件读取数据。
(3)读取应用程序传送给设备文件的数据和回送应用程序请求的数据。
(4)检测错误和处理中断。
5.操作系统的并发控制中,异步通知是十分重要的方法。请简要叙述异步通知
答:异步通知是指一旦设备准备就绪,则该设备会主动通知应用程序,这样应用程序就不需要不断地查询设备状态,-通常把异步通知称为信号驱动的异步 V/O(SIGIO),这有点类似于硬件上的中断。
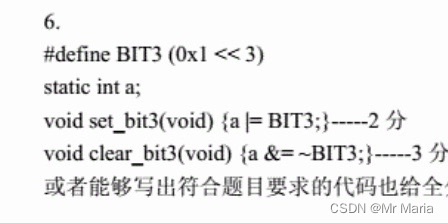
- 嵌入式系统总是要用户对变量或寄存器进行位操作。给定一个整型变量a,写两段代码,第一个设置a的bit 3,第二个清除a的bit 3。在以上两个操作中,要保持其它位不变。
- 请解释嵌入式c语言中的关键字const有什么含义

五、编程题(30)
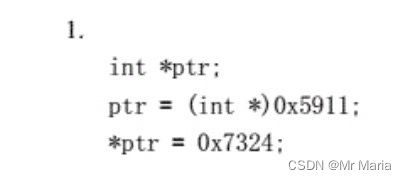
1.嵌入式系统经常要求访问绝对地址,要求设置一绝对地址为 0x5911 的整型变量的值为 0x7324。
编译器是一个纯粹的 ANSI 编译器。写代码去完成这一任务。
- 请按要求写出一个 Makefile 文件,要求包括:采用交叉编译器,源文件为 buzzer
.c,目标文件为
led8,使用led8.h头文件,静态编译,clean 操作删除上次编译结果。

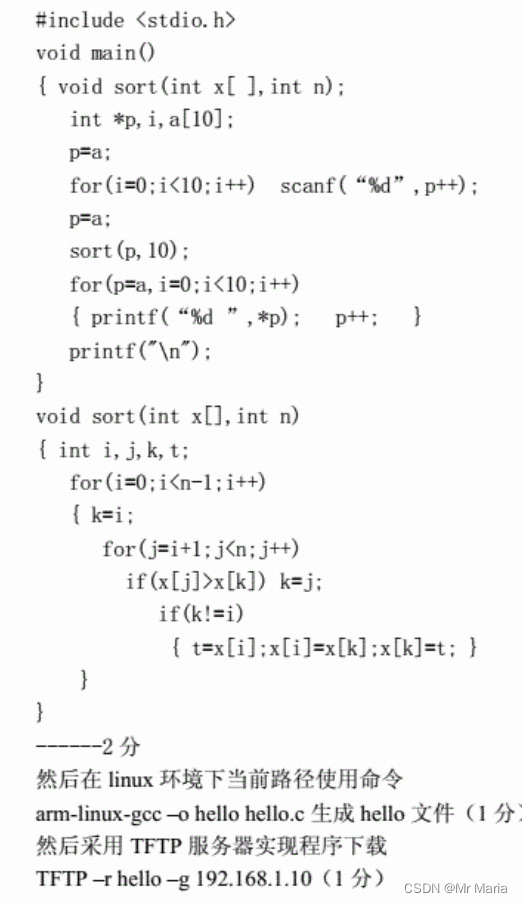
- 假设目标机 IP地址为 192.168.1.120,请首先在主机上编写程序实现对 10 个整数由大到小进行排序(请写出完整源码),然后简述将该程序编译、下载至目标机、修改文件权限以及执行该程序的过程。
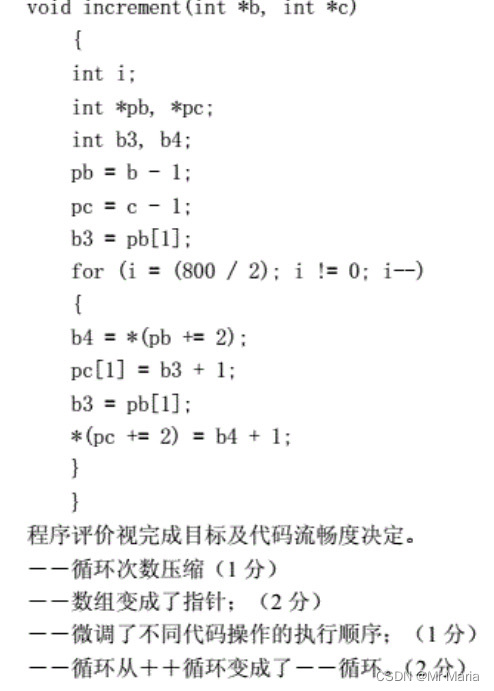
- 请阅读下段代码,并按要求设计新的代码段。
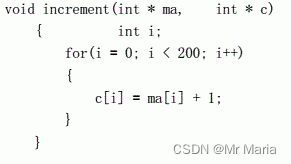
请改写上述代码段,以实现如下功能:
(1)减少福环次数。
(2) 减少每次计算数组偏移量的指令。
(3) 减少流水线阻塞。
(4)每次循环滅少一条判断指令。

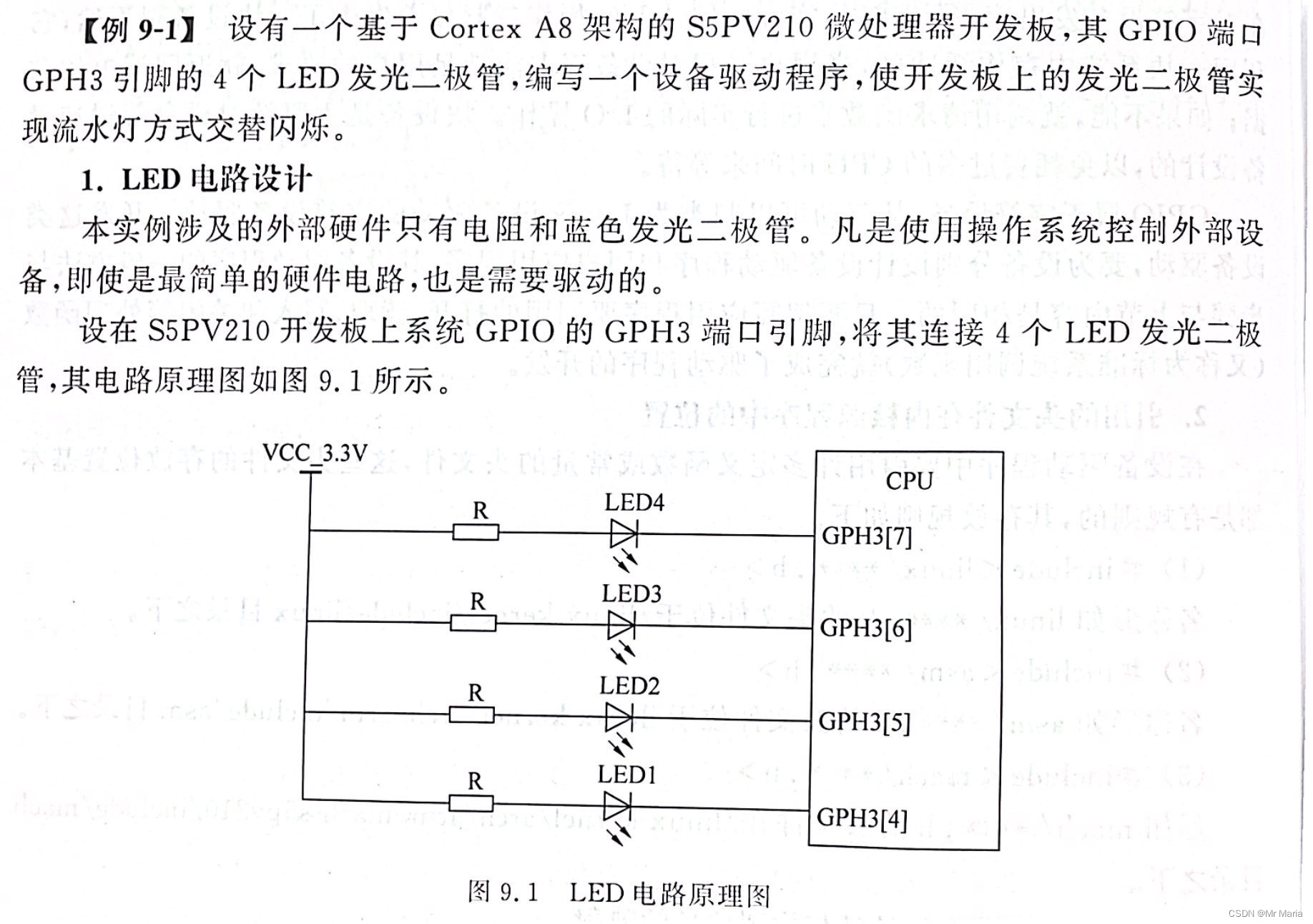
- GPIO口应用

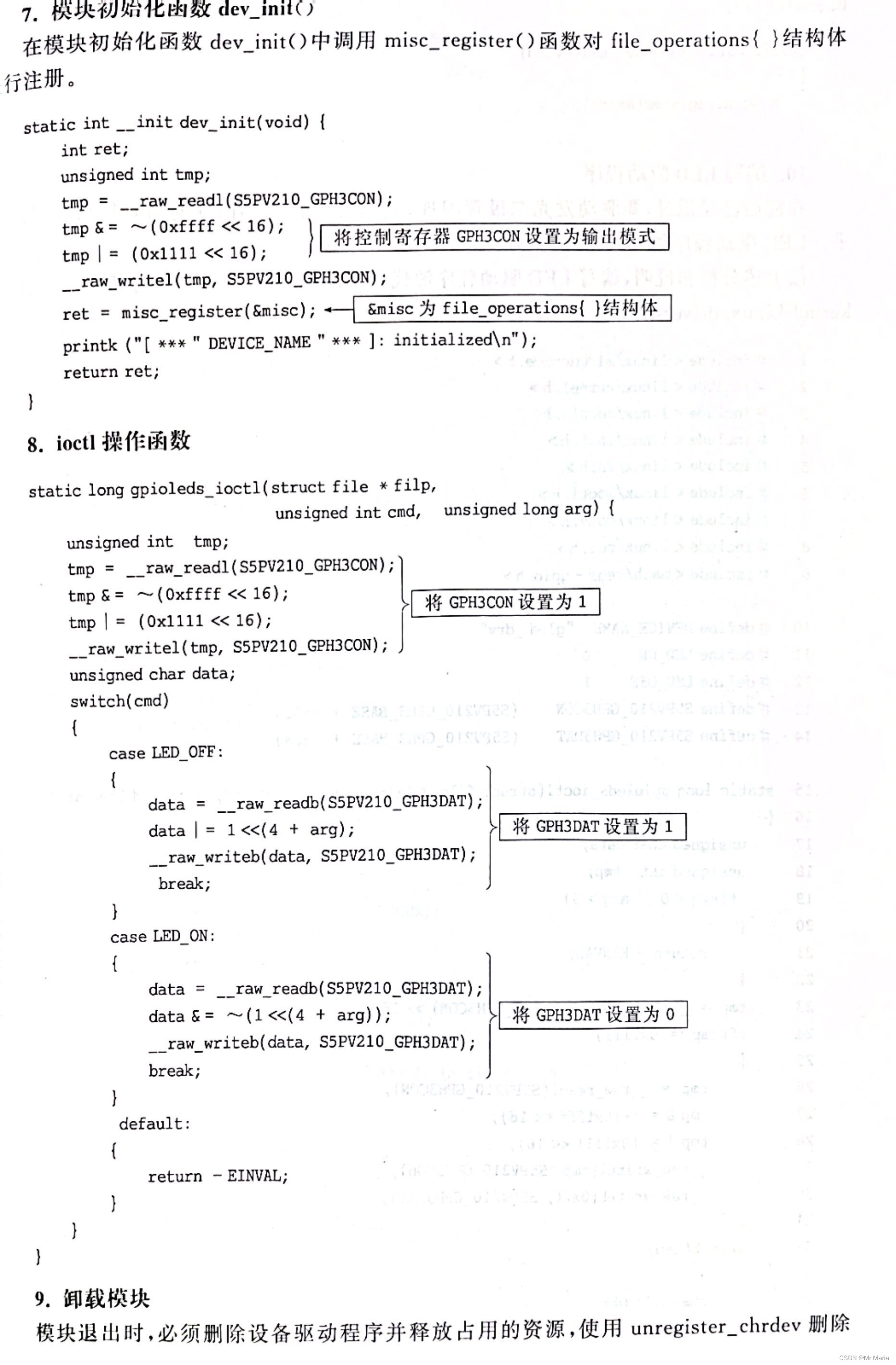
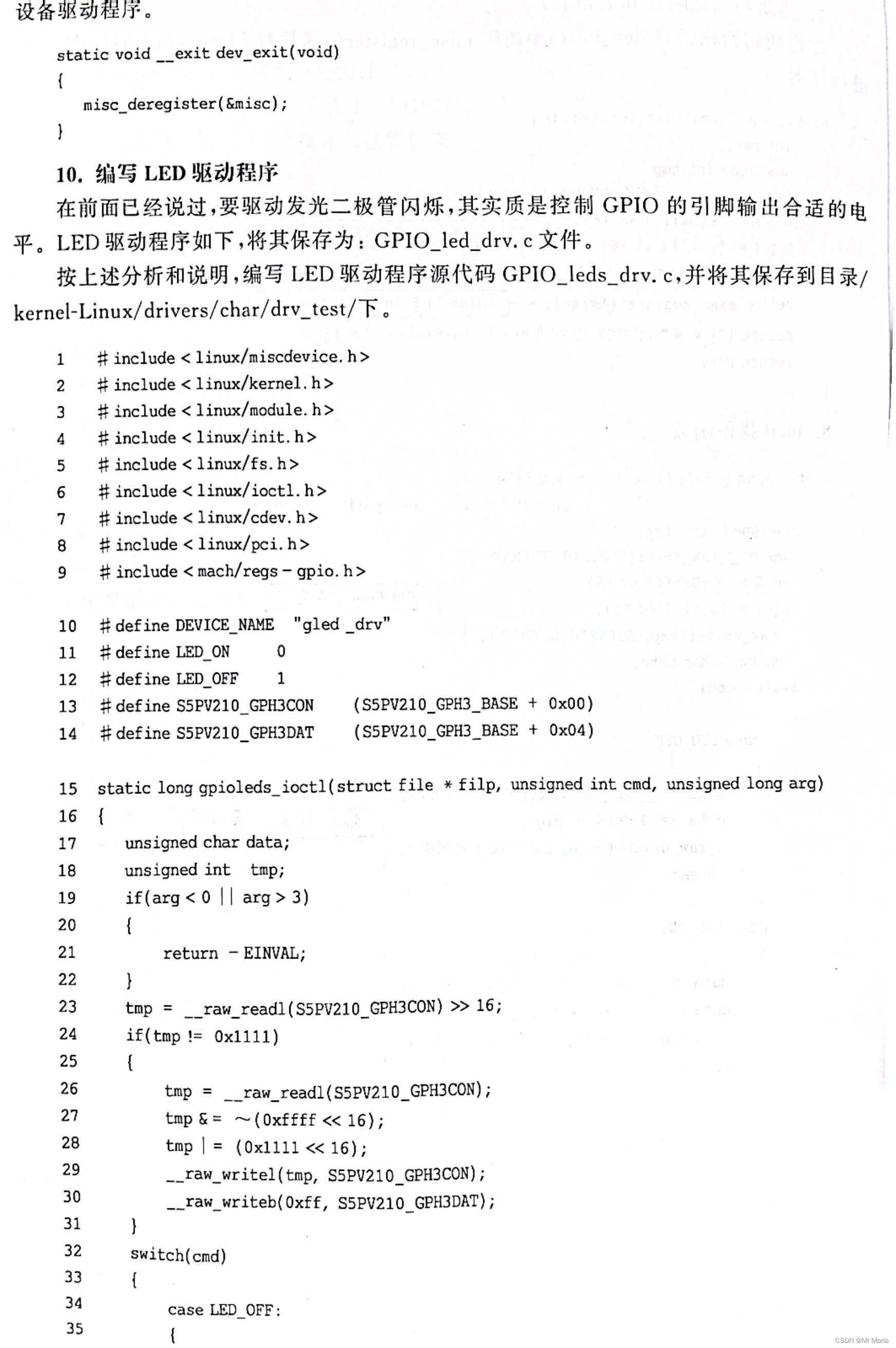
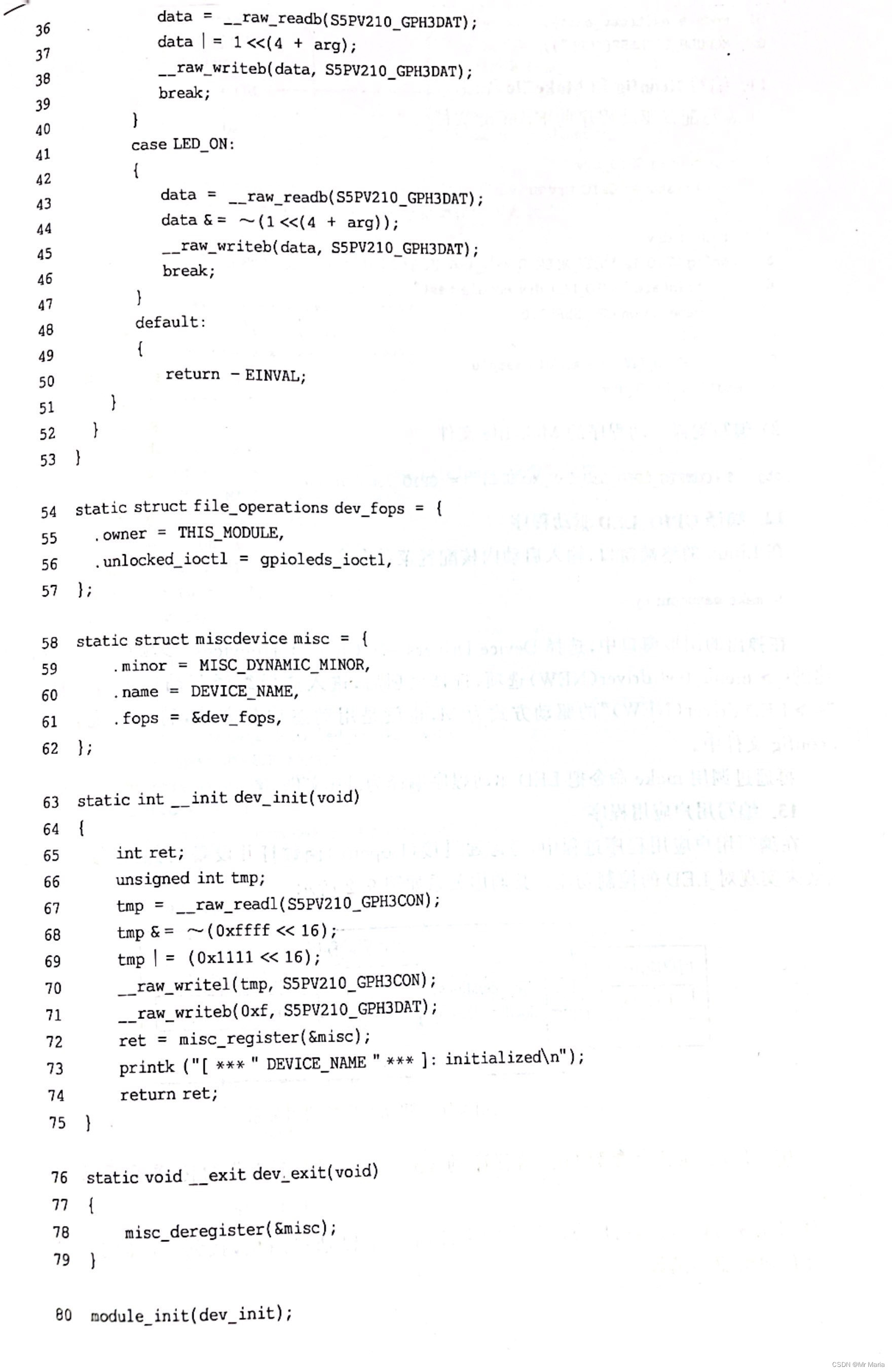

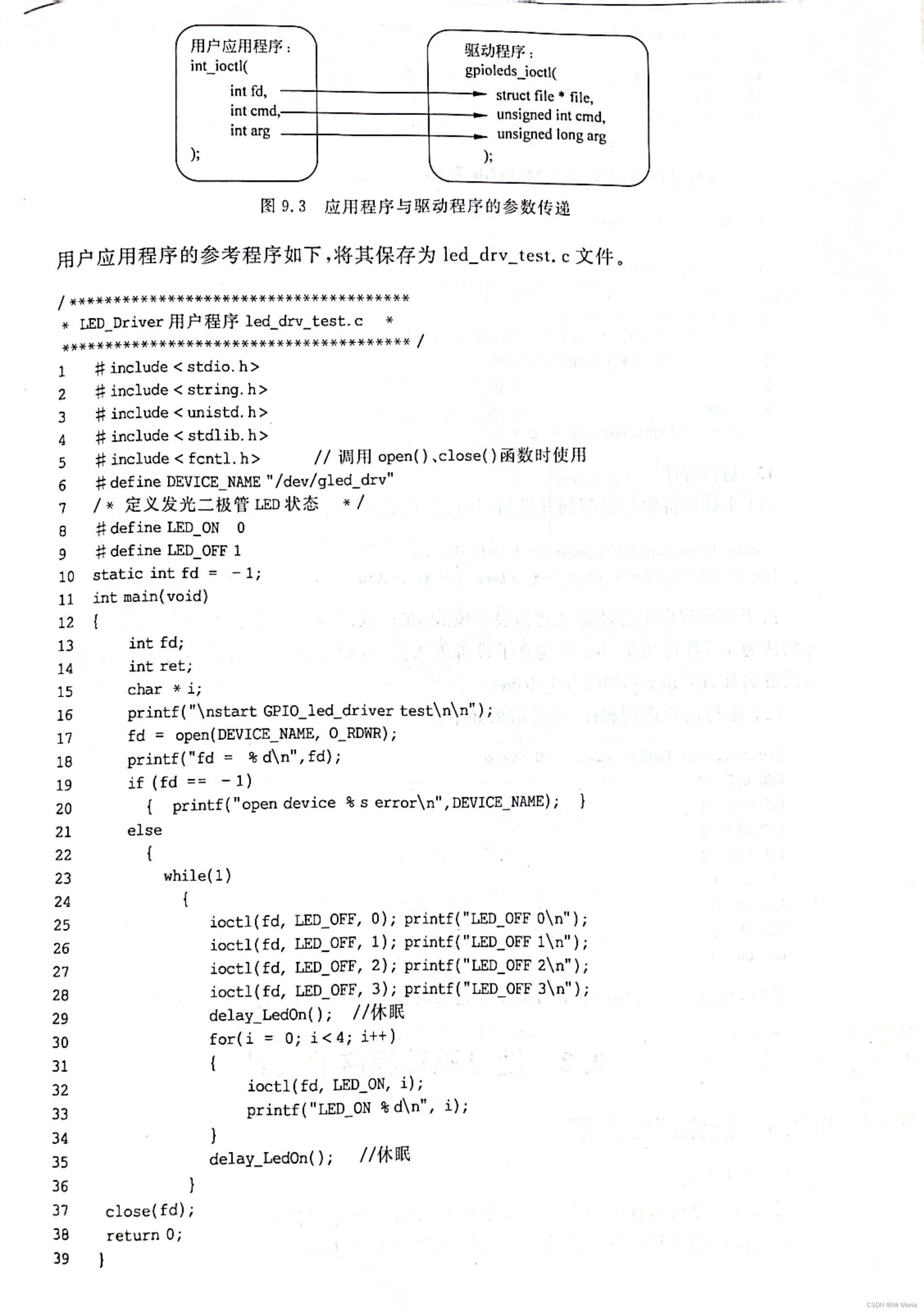
- 驱动程序设计
6、设计一个程序,在用户空间的用户应用程序中输入一个10以内的整数n,通过内核空间的设备驱动程序计算从1加到n的和。
解答:
(1)内核空间的驱动程序代码,将程序保存为sum_drv.c
/***************************** * 驱动程序 sum_drv.c
****************************/#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/module.h> //模块驱动程序的头文件#define sum_drv_MAJOR 114 //设备号 创建设备入口点时要与此值一致
#define DEVICE_NAME “sum_drv_module”void showversion(void) {
printk(“kernel: ***********************************\n”);
printk(“kernel: \t %s \t\n”, DEVICE_NAME);
printk(“kernel: ************************************\n\n”); }// --------设备对应的打开函数---------------- static int sum_open(struct inode
*inode, struct file *file){
printk(“kernel: hello open.\n”);
return 0; }// ---------设备对应的写操作函数------------- static int sum_write(struct file
*file, const char __user * buf,
size_t count, loff_t *ppos){
printk(“kernel: hello write. n=%d \n”, count);
int i=1;
int s=0;
for(i=1;i<=count; i++)
s = s + i;
printk(“kernel: s = %d \n”, s);
return 0; }// ----设备向系统注册用的OPS结构,里面是对应的读操作入口----- static struct file_operations
sum_flops = {
.open = sum_open,
.write = sum_write, };// ------系统初始化----------- static int __init sum_init(void){
int ret;
ret = register_chrdev(sum_drv_MAJOR,DEVICE_NAME, &sum_flops);
showversion();
if (ret < 0) {
printk(“kernel: can’t register major number.\n”);
return ret;
}
printk(“kernel: OOKK! initialized.\n”);
return 0; }// ------系统卸载---------- static void __exit sum_exit(void){
unregister_chrdev(sum_drv_MAJOR, DEVICE_NAME);
printk(“kernel:” DEVICE_NAME " removed.\n"); }// —内核模块入口,相当于main()函数,完成模块初始化------ module_init(sum_init);
//—卸载时调用的函数入口,完成模块卸载------ module_exit(sum_exit); //
------驱动程序版本信息--------- MODULE_LICENSE(“GPL”);(2)Makefile文件 obj-m := sum_drv.o PWD := ( s h e l l p w d ) a l l : m a k e − C / l i b / m o d u l e s / (shell pwd) all: make -C /lib/modules/ (shellpwd)all:make−C/lib/modules/(shell uname -r)/build M=$(PWD) modules clean: rm -rf
*.o ~ core ..cmd *.mod.c ./tmp_version(3)用户应用程序,将程序保存为sum_drv_test.c
#include <fcntl.h>
#include <stdio.h>int main(void) {
int fd;
int n;
fd = open(“/dev/sum_drv”, O_RDWR);
if(fd < 0){
printf(“can’t open!\n”);
}
printf(“fd=%d \n”, fd);
scanf(“%x”, &n);
write(fd, NULL, n); // ioctl(fd, cmd);
close(fd);
return 0; }(4)用dmesg查看运行结果。
- 网络程序设计