现在的空调,有很多安装在高层,一旦安装使用后,外机几乎不可能再清洗。因为费用高,清洁工人的钱应该是好几百还不止;清洁风险高,空调师傅需要高空作业,如果发生意外业主难以承担。但空调运行几年后,冷凝片上布满灰尘,制冷效率大减,浪费能源和金钱,制冷效果也不好。
博主想做一个清洗空调外机的装置,先把想法放到博客上,再慢慢来实现。这个机器人工作在空调顶部,大概半平方的铁壳上,用水去冲洗冷凝片。


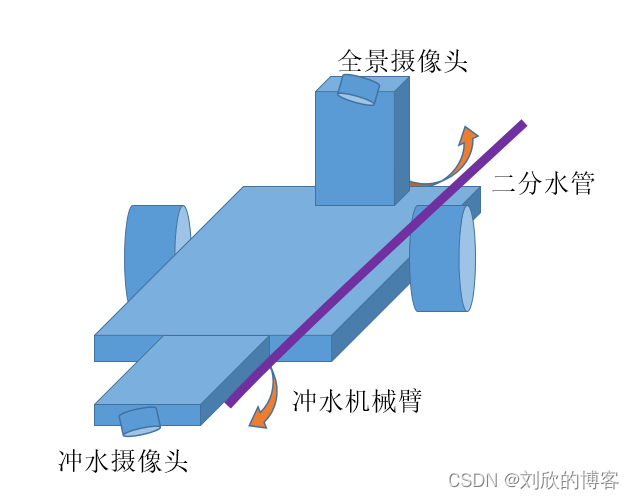
机器人需要摄像头观察自身的位置,和冲洗冷凝片的情况,自身需要移动功能及一个可以调节角度的简单机械臂。水可以用二分水管接入机器人,电源可以外部供电,水管和电源线也是机器人的一部分,这样即使从室外机上掉落,也是安全的。
工作方式:人工把小车(机器人)放置在空调室外机铁壳上,远程控制小车移动,远程控制小车对冷凝片从冲洗。
市场需求:目前没有见到类似装置,但看看小区高层上每家每户的空调,都是需要的,博主也是从自家空调的清洁上想到的需求。
机器人成本:机器人可以制作得并不复杂,因为供电是有线的。摄像头也是有线的,水管也是有线的。
实际效果:效果一定很好,一部分是当用户通过摄像头看到空调冷凝片上的灰尘就知道花100,200元钱是值得的,而清洁后实际使用也可以体验到差别,如果小区10%的高层空调都可以用该装置(机器人)清洁,所节约的能源也是很可观的。。。