一、Yolov8环境搭建
首先创建虚拟环境下载安装(其实就是yolov8的环境)再大概写一下步骤,没有想详细的看本人另外一篇:YOLOv8环境搭建_yolov8环境配置-CSDN博客
1、下载安装anaconda
2、创建虚拟环境
conda create -n my_yolov8 python=3.8.8
3、激活刚创建的虚拟环境
activate my_yolov8
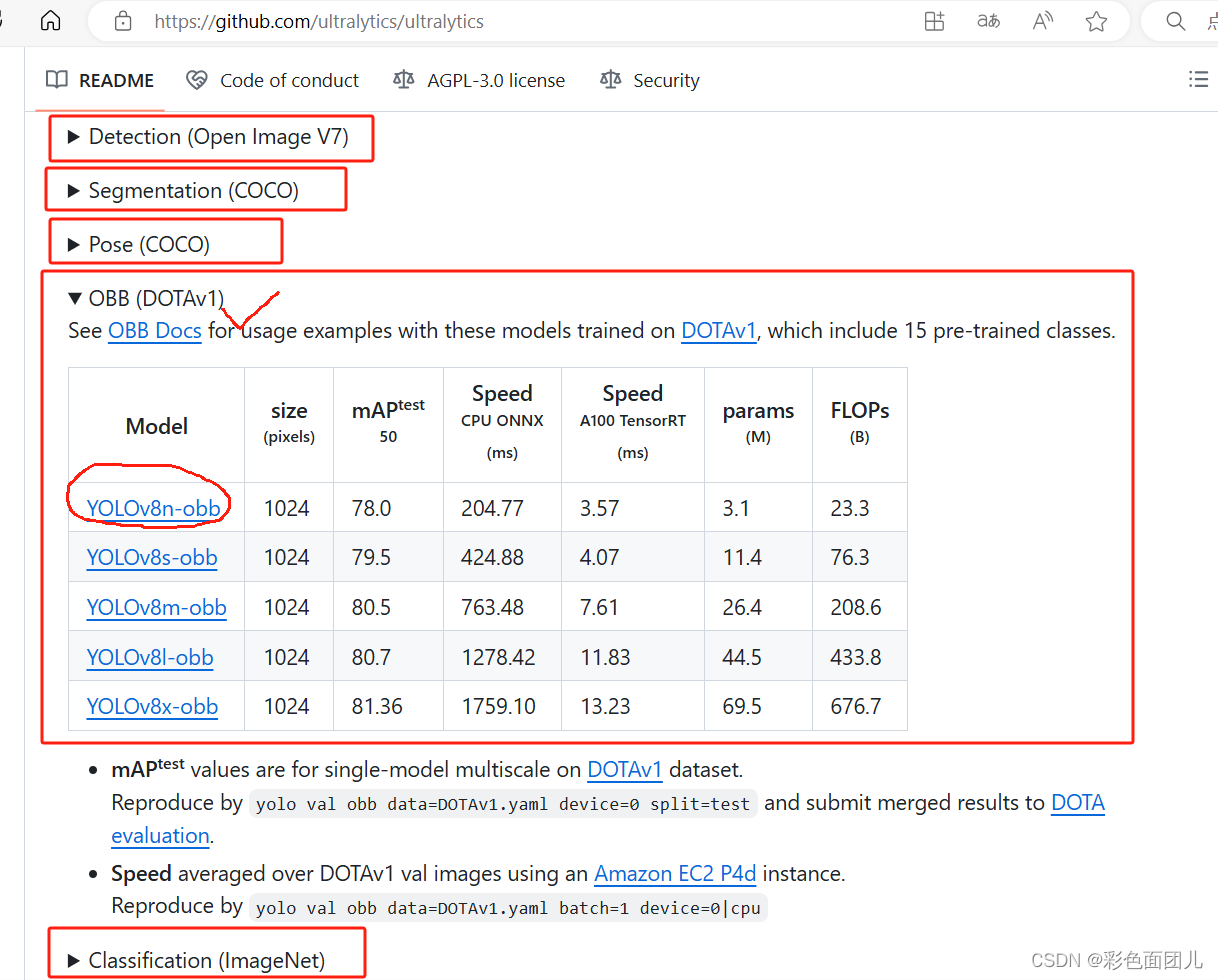
4、 到官方网站下载yolo模型 ,下载好后解压
https://github.com/ultralytics/ultralytics
4、文件requirements.txt ,安装配置环境
pip install -r 自己的requirements路径\ultralytics-main\requirements.txt
requirements.txt内容:自己可以在下载的ultralytics-main下面新建一个txt
# Ultralytics requirements
# Usage: pip install -r requirements.txt# Base ----------------------------------------
hydra-core>=1.2.0
matplotlib>=3.2.2
numpy>=1.18.5
opencv-python>=4.1.1
Pillow>=7.1.2
PyYAML>=5.3.1
requests>=2.23.0
scipy>=1.4.1
torch>=1.7.0
torchvision>=0.8.1
tqdm>=4.64.0# Logging -------------------------------------
tensorboard>=2.4.1
# clearml
# comet# Plotting ------------------------------------
pandas>=1.1.4
seaborn>=0.11.0# Export --------------------------------------
# coremltools>=6.0 # CoreML export
# onnx>=1.12.0 # ONNX export
# onnx-simplifier>=0.4.1 # ONNX simplifier
# nvidia-pyindex # TensorRT export
# nvidia-tensorrt # TensorRT export
# scikit-learn==0.19.2 # CoreML quantization
# tensorflow>=2.4.1 # TF exports (-cpu, -aarch64, -macos)
# tensorflowjs>=3.9.0 # TF.js export
# openvino-dev # OpenVINO export# Extras --------------------------------------
ipython # interactive notebook
psutil # system utilization
thop>=0.1.1 # FLOPs computation
# albumentations>=1.0.3
# pycocotools>=2.0.6 # COCO mAP
# roboflow# HUB -----------------------------------------
GitPython>=3.1.24
二、数据集制作
1、安装制作标签软件
激活自己的虚拟环境先下载安装labelimg,要装rolabelimg要先装labelimg
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple labelImg==1.8.6
在lib-site-packages-下有这两个了。

2.安装rolabelimg
去github下载项目rolabelimg,
链接:https://pan.baidu.com/s/1fthJMm6E0r2zEVaZOiF3Gw
提取码:xikk,
解压后,进入项目中运行一下命令即可驱动,roLabelImg-master也可以放lib-site-packages

python 路径\roLabelImg.py
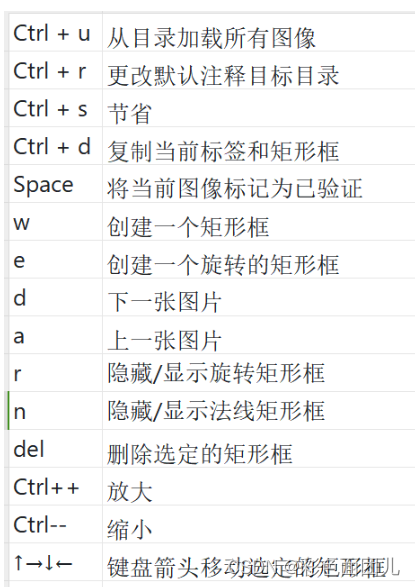
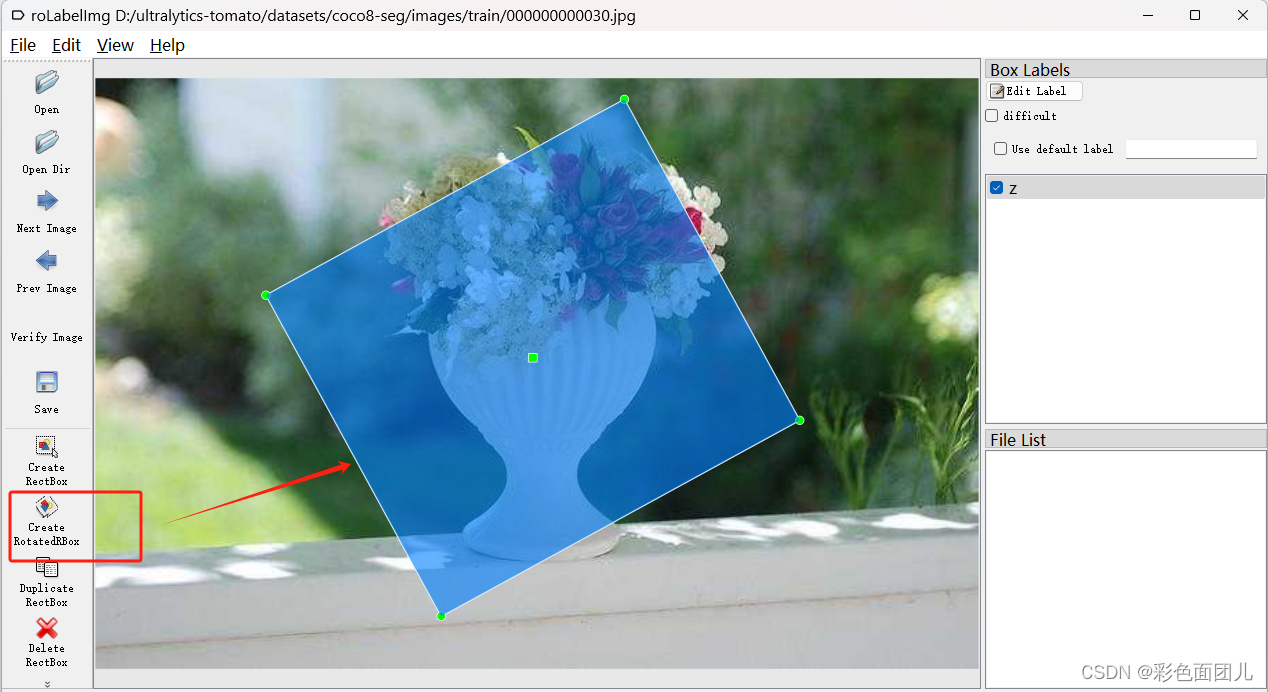 用按键zxcv进行旋转调整角度
用按键zxcv进行旋转调整角度
3、标签可训练格式转换
# 文件名称 :roxml_to_dota.py
# 功能描述 :把rolabelimg标注的xml文件转换成dota能识别的xml文件,
# 再转换成dota格式的txt文件
# 把旋转框 cx,cy,w,h,angle,或者矩形框cx,cy,w,h,转换成四点坐标
3.1 roxml2dotaxml2txt
x1,y1,x2,y2,x3,y3,x4,y4
import os
import xml.etree.ElementTree as ET
import mathcls_list = ['1', 'gj', 'ladder'] #修改为自己的标签def edit_xml(xml_file, dotaxml_file):"""修改xml文件:param xml_file:xml文件的路径:return:"""# dxml_file = open(xml_file,encoding='gbk')# tree = ET.parse(dxml_file).getroot()tree = ET.parse(xml_file)objs = tree.findall('object')for ix, obj in enumerate(objs):x0 = ET.Element("x0") # 创建节点y0 = ET.Element("y0")x1 = ET.Element("x1")y1 = ET.Element("y1")x2 = ET.Element("x2")y2 = ET.Element("y2")x3 = ET.Element("x3")y3 = ET.Element("y3")# obj_type = obj.find('bndbox')# type = obj_type.text# print(xml_file)if (obj.find('robndbox') == None):obj_bnd = obj.find('bndbox')obj_xmin = obj_bnd.find('xmin')obj_ymin = obj_bnd.find('ymin')obj_xmax = obj_bnd.find('xmax')obj_ymax = obj_bnd.find('ymax')# 以防有负值坐标xmin = max(float(obj_xmin.text), 0)ymin = max(float(obj_ymin.text), 0)xmax = max(float(obj_xmax.text), 0)ymax = max(float(obj_ymax.text), 0)obj_bnd.remove(obj_xmin) # 删除节点obj_bnd.remove(obj_ymin)obj_bnd.remove(obj_xmax)obj_bnd.remove(obj_ymax)x0.text = str(xmin)y0.text = str(ymax)x1.text = str(xmax)y1.text = str(ymax)x2.text = str(xmax)y2.text = str(ymin)x3.text = str(xmin)y3.text = str(ymin)else:obj_bnd = obj.find('robndbox')obj_bnd.tag = 'bndbox' # 修改节点名obj_cx = obj_bnd.find('cx')obj_cy = obj_bnd.find('cy')obj_w = obj_bnd.find('w')obj_h = obj_bnd.find('h')obj_angle = obj_bnd.find('angle')cx = float(obj_cx.text)cy = float(obj_cy.text)w = float(obj_w.text)h = float(obj_h.text)angle = float(obj_angle.text)obj_bnd.remove(obj_cx) # 删除节点obj_bnd.remove(obj_cy)obj_bnd.remove(obj_w)obj_bnd.remove(obj_h)obj_bnd.remove(obj_angle)x0.text, y0.text = rotatePoint(cx, cy, cx - w / 2, cy - h / 2, -angle)x1.text, y1.text = rotatePoint(cx, cy, cx + w / 2, cy - h / 2, -angle)x2.text, y2.text = rotatePoint(cx, cy, cx + w / 2, cy + h / 2, -angle)x3.text, y3.text = rotatePoint(cx, cy, cx - w / 2, cy + h / 2, -angle)# obj.remove(obj_type) # 删除节点obj_bnd.append(x0) # 新增节点obj_bnd.append(y0)obj_bnd.append(x1)obj_bnd.append(y1)obj_bnd.append(x2)obj_bnd.append(y2)obj_bnd.append(x3)obj_bnd.append(y3)tree.write(dotaxml_file, method='xml', encoding='utf-8') # 更新xml文件# 转换成四点坐标
def rotatePoint(xc, yc, xp, yp, theta):xoff = xp - xc;yoff = yp - yc;cosTheta = math.cos(theta)sinTheta = math.sin(theta)pResx = cosTheta * xoff + sinTheta * yoffpResy = - sinTheta * xoff + cosTheta * yoffreturn str(int(xc + pResx)), str(int(yc + pResy))def totxt(xml_path, out_path):# 想要生成的txt文件保存的路径,这里可以自己修改files = os.listdir(xml_path)i = 0for file in files:tree = ET.parse(xml_path + os.sep + file)root = tree.getroot()name = file.split('.')[0]output = out_path + '\\' + name + '.txt'file = open(output, 'w')i = i + 1objs = tree.findall('object')for obj in objs:cls = obj.find('name').textbox = obj.find('bndbox')x0 = int(float(box.find('x0').text))y0 = int(float(box.find('y0').text))x1 = int(float(box.find('x1').text))y1 = int(float(box.find('y1').text))x2 = int(float(box.find('x2').text))y2 = int(float(box.find('y2').text))x3 = int(float(box.find('x3').text))y3 = int(float(box.find('y3').text))if x0 < 0:x0 = 0if x1 < 0:x1 = 0if x2 < 0:x2 = 0if x3 < 0:x3 = 0if y0 < 0:y0 = 0if y1 < 0:y1 = 0if y2 < 0:y2 = 0if y3 < 0:y3 = 0for cls_index, cls_name in enumerate(cls_list):if cls == cls_name:file.write("{} {} {} {} {} {} {} {} {} {}\n".format(x0, y0, x1, y1, x2, y2, x3, y3, cls, cls_index))file.close()# print(output)print(i)if __name__ == '__main__':# -----**** 第一步:把xml文件统一转换成旋转框的xml文件 ****-----roxml_path = r'E:\CodeProject\ultralytics-main-OBB\data_transfor\org_xml'dotaxml_path = r'E:\CodeProject\ultralytics-main-OBB\data_transfor\dota_xml'out_path = r'E:\CodeProject\ultralytics-main-OBB\data_transfor\dota_txt'filelist = os.listdir(roxml_path)for file in filelist:edit_xml(os.path.join(roxml_path, file), os.path.join(dotaxml_path, file))# -----**** 第二步:把旋转框xml文件转换成txt格式 ****-----totxt(dotaxml_path, out_path)三、配置文件设置
Yolov8_OBB斜框训练自己的数据集手把手教学_yolov8 obb-CSDN博客
四、训练
下载模型预训练权重:
训练:
yolo obb train data=路径\datasets\my-dota8-obb.yaml model=yolov8s-obb.pt epochs=20 imgsz=640 device=0,1,2,3
参考:
windows下python3安装rolabelimg或者labelimg2标注斜框-CSDN博客
Yolov8_obb(prob loss) 基于anchor_free的旋转框目标检测,剪枝,跟踪(ByteTracker)_yolov8 obb-CSDN博客








![[Cloud Networking] Layer3 (Continue)](https://img-blog.csdnimg.cn/direct/d8b721f0639a43119634f2ccd0fd920d.png)