准备开始写一个系列,介绍下AGV机器人的调度的开发和应用。
按照openTCS的核心内容,国内多家广泛应用于AGV的调度。那么架构图如下:
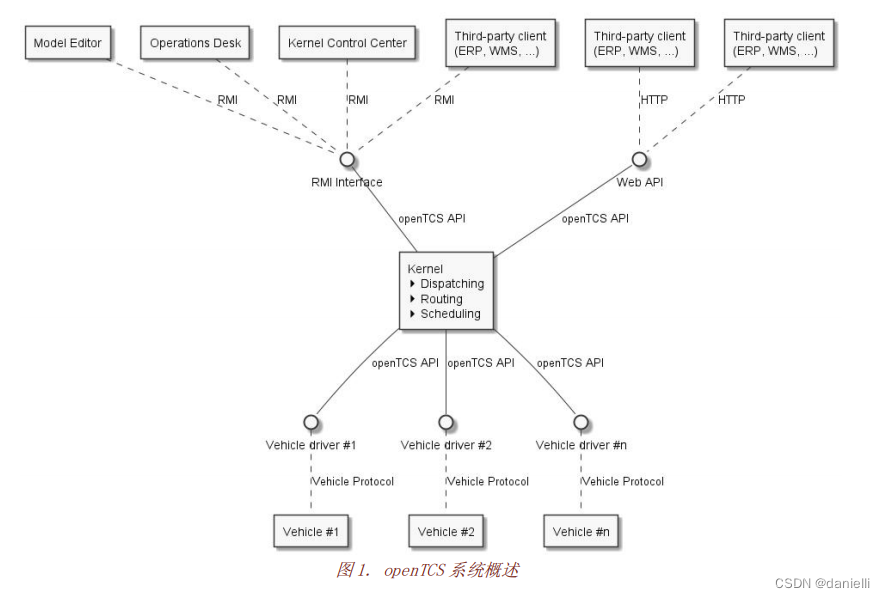
Kernel中有一个是Routing,这是路由规划模块,需要实现的细节功能包括如下:
1. List<LandmarkInfo> GetRoute(LandmarkInfo StartLand, LandmarkInfo EndLand)
根据地标,获取到最优的路径信息。(策略可以是最短路径,最小拐弯等)
算法可以使用A*等,或其他优化的算法。
2. List<LandmarkInfo> getNextLand(LandmarkInfo preLand)
部分有用的子方法,获取下一地标
3. void AccountDirect(ref List<LandmarkInfo> Routes)
计算转向和前进和后退
后面有空时详细展开各项。如需要详细讨论的,可发邮件给我 448283544@qq.com
另外,三个重要模块是调度、交通管制、通讯协议。下节介绍核心调度模块,其中需要的线程和任务管理,包括任务的派发,机器人的回原点充电等功能。 另外这个系统重要的还包括有地图模型编辑器、任务实时显示等功能。