文章目录
- 一、功能简介
- 二、软件设计
- 三、实验现象
- 联系作者
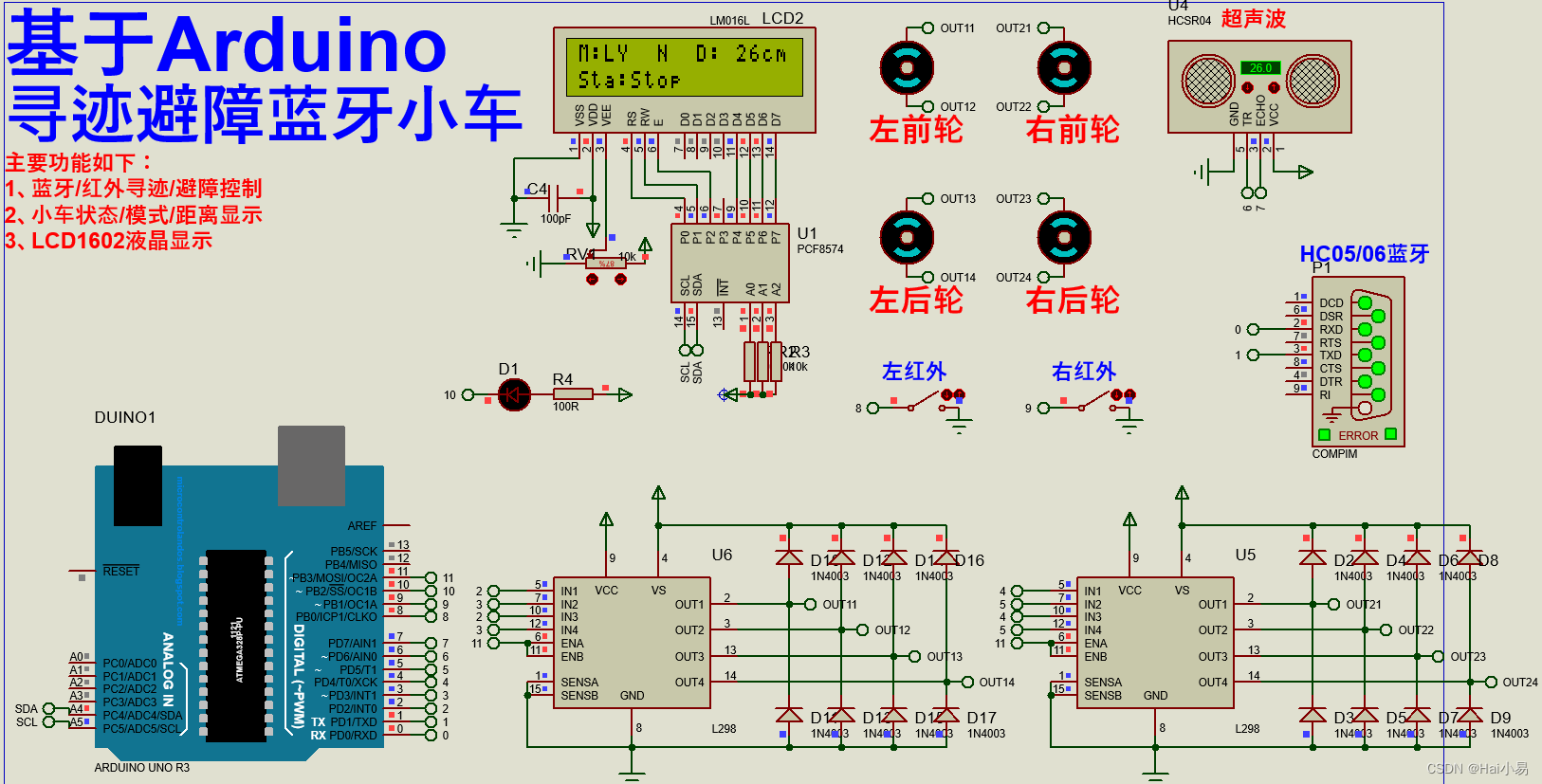
一、功能简介
本项目使用Proteus8仿真Arduino单片机控制器,使LCD1602液晶,L298电机,直流电机,HC05/06蓝牙模块,HCSR04超声波,红外寻迹模块等。
主要功能:
系统运行后,LCD1602显示小车运行状态、模式、检测距离;
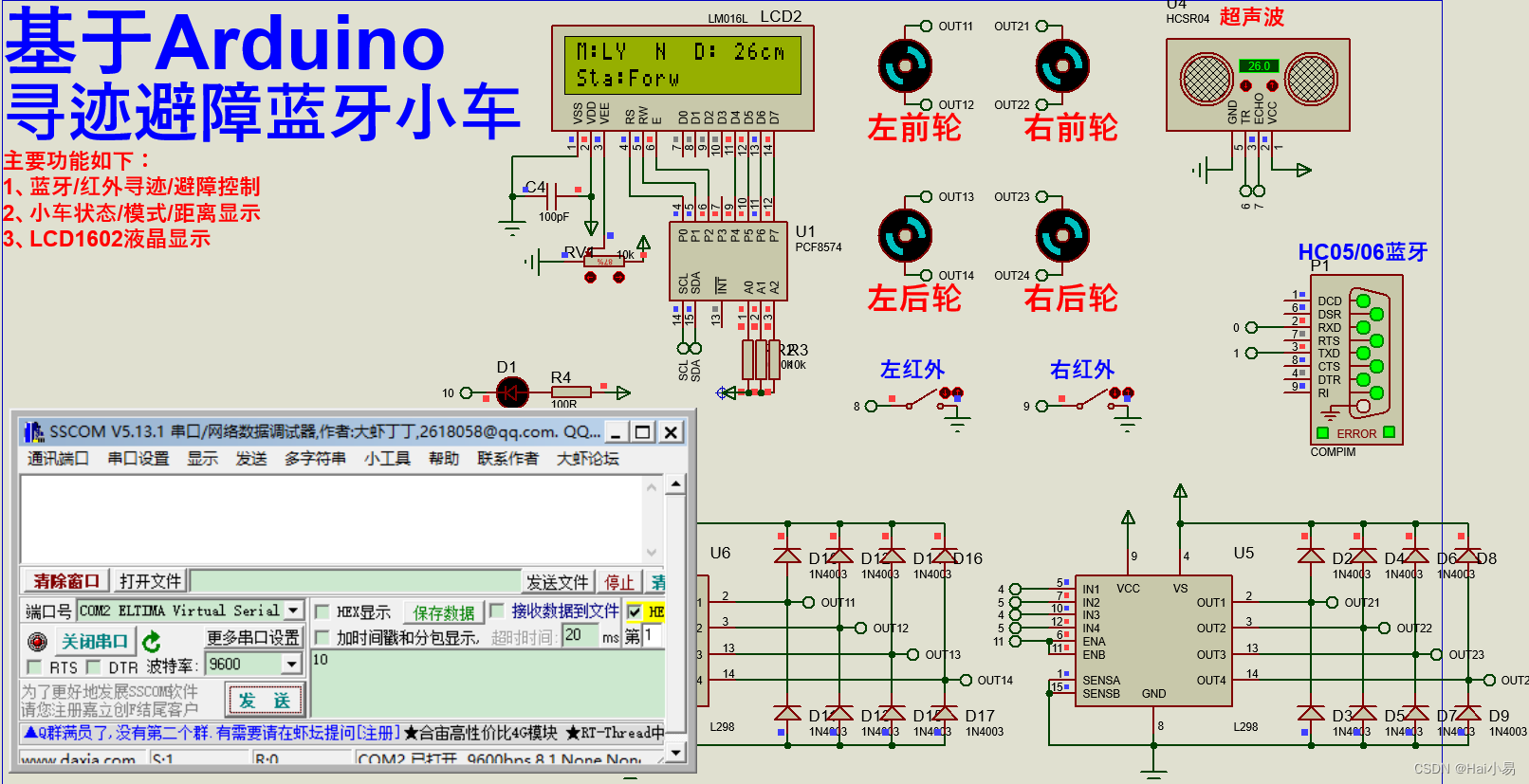
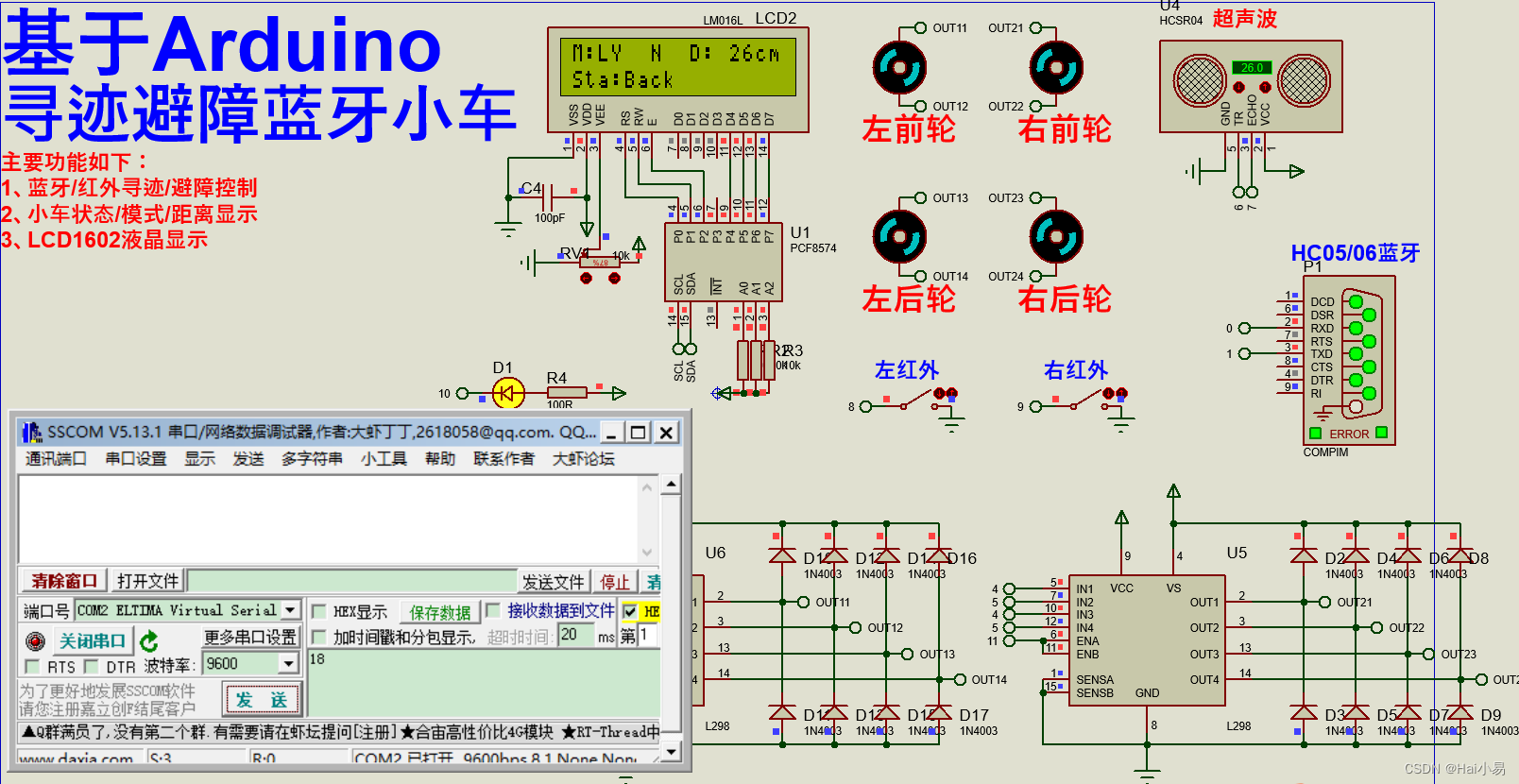
当小车在蓝牙模式,可通过蓝牙发送命令控制小车前进、后退、左转、右转、模式、LED开关;
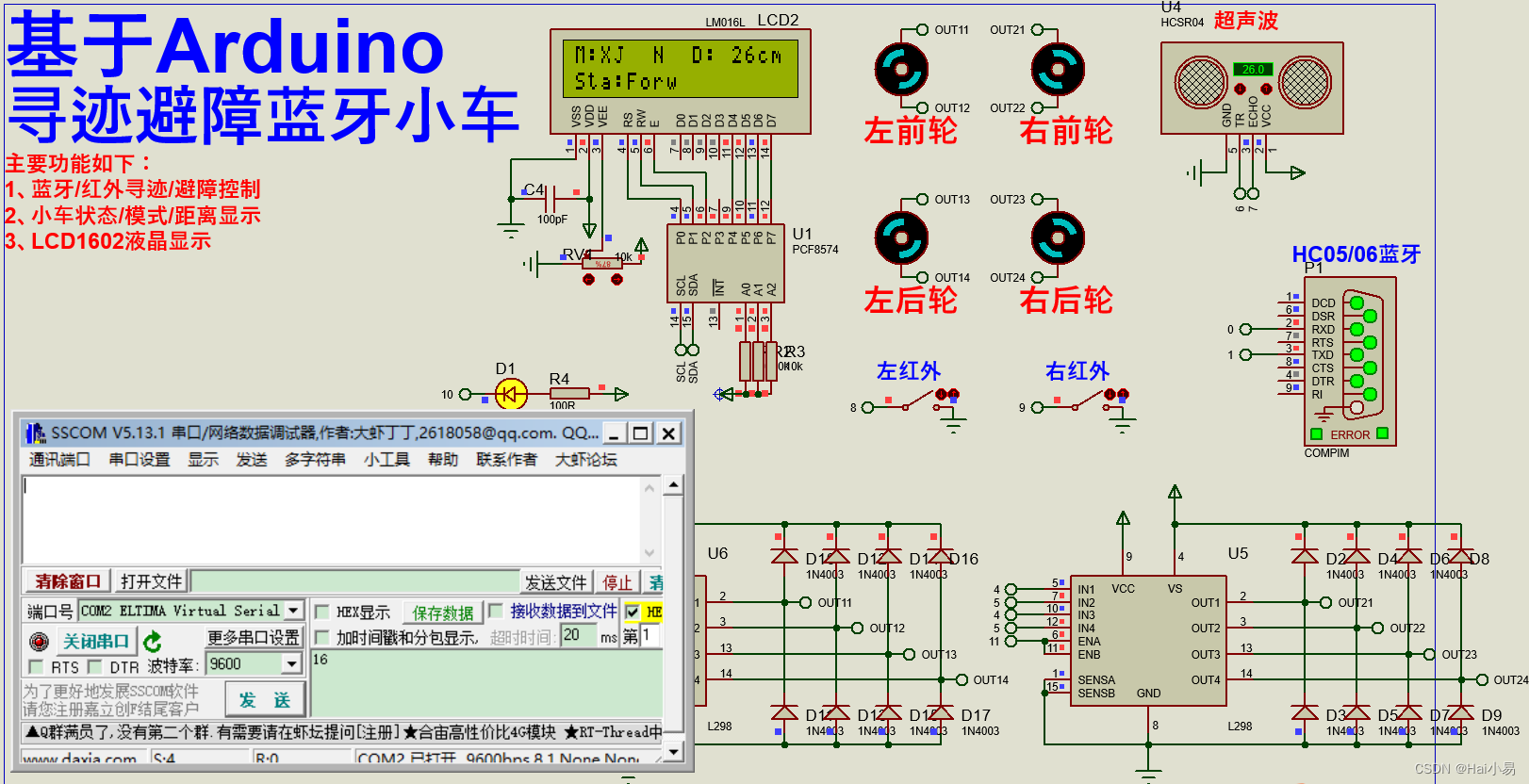
当小车在寻迹模式,通过左右红外传感器感应寻迹,前进时LED亮,否则灭;
当小车在避障模式,通过超声波检测距离,当距离小于避障值,右转,否则前进;
蓝牙控制命令(十六进制):
0X10->前进
0X11->后退
0X12->左转
0X13->右转
0X14->停止
0X15->蓝牙模式
0X16->寻迹模式
0X17->避障模式
0X18->LED开
0X19->LED关
二、软件设计
/*
作者:嗨小易(QQ:3443792007)*///系统数据获取
void sys_data_get(void)
{while(1){//获取距离sys_ctrl.dis=ultrasonicwave_measure();//红外感应if(HW_L==0 && HW_R==1)sys_ctrl.ir=1;else if(HW_L==1 && HW_R==0)sys_ctrl.ir=2;else if(HW_L==1 && HW_R==1)sys_ctrl.ir=0;break;}
}//系统数据显示
void sys_data_show(void)
{while(1){//模式显示if(sys_ctrl.mode==0)lcd1602_show_string(2,0,"LY");else if(sys_ctrl.mode==1)lcd1602_show_string(2,0,"XJ"); else if(sys_ctrl.mode==2)lcd1602_show_string(2,0,"BZ");//红外感应状态显示if(sys_ctrl.ir==0)lcd1602_show_string(6,0,"N");else if(sys_ctrl.ir==1)lcd1602_show_string(6,0,"L");else if(sys_ctrl.ir==2)lcd1602_show_string(6,0,"R"); //距离显示lcd1602_show_nums(11,0,sys_ctrl.dis,3,0);break;}
}//系统数据设置
void sys_data_set(void)
{if(Serial.available()) //当串口接收到信息后{UART_RX_BUF[0]=Serial.read();//读取接收到的数据}//模式选择if(UART_RX_BUF[0]==CAR_MODE_LY){sys_ctrl.dir=0;sys_ctrl.mode=0;}else if(UART_RX_BUF[0]==CAR_MODE_XJ)sys_ctrl.mode=1;else if(UART_RX_BUF[0]==CAR_MODE_BZ)sys_ctrl.mode=2;//蓝牙模式if(sys_ctrl.mode==0){//蓝牙控制命令switch(UART_RX_BUF[0]){case CAR_FORM://前进sys_ctrl.dir=1;break;case CAR_BACK://后退sys_ctrl.dir=2;break;case CAR_LEFT://左转sys_ctrl.dir=3;break;case CAR_RIGHT://右转sys_ctrl.dir=4;break;case CAR_STOP://停止sys_ctrl.dir=0;break;case LED_ON://LED开LED(0);break;case LED_OFF://LED关LED(1);break;} }if(UART_RX_BUF[0]!=0)UART_RX_BUF[0]=0;
}//系统功能控制
void sys_fun_ctrl(void)
{//蓝牙模式if(sys_ctrl.mode==0){//小车控制switch(sys_ctrl.dir){case 0:car_stop();break;//停止case 1:car_forward();break;//前进case 2:car_back();break;//后退case 3:car_left();break;//左转case 4:car_right();break;//右转}
// //小车状态显示
// _car_staus_show(sys_ctrl.dir);
// if(sys_ctrl.dir!=0)sys_ctrl.dir=0; }//寻迹模式else if(sys_ctrl.mode==1){//如果没有感应黑线,前进,开灯if(sys_ctrl.ir==0){LED(0);sys_ctrl.dir=1;car_forward();}//如果左侧感应黑线,左转,关灯else if(sys_ctrl.ir==1){LED(1);sys_ctrl.dir=3;car_left();}//如果右侧感应黑线,右转,关灯else if(sys_ctrl.ir==2){LED(1);sys_ctrl.dir=4;car_right();} }//避障模式else if(sys_ctrl.mode==2){LED(1);//如果检测距离大于避障距离,前进if(sys_ctrl.dis>BZ_VALUE){sys_ctrl.dir=1;car_forward(); }//如果检测距离小于避障距离,右转else{sys_ctrl.dir=4;car_right(); } }//小车状态显示_car_staus_show(sys_ctrl.dir);
}三、实验现象
B站演示视频:https://space.bilibili.com/444388619
联系作者
专注于51单片机、STM32、国产32、DSP、Proteus、ardunio、ESP32、物联网软件开发,PCB设计,视频分享,技术交流。