一.任务需求
1. 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。
2. 当前智能汽车上一般配置有12路超声波雷达,这些专用超声波雷达内置了MCU,直接输出数字化的测距结果,一般硬件接口采用串口RS485,通信协议采用modbus。请思考:
-
RS485与RS232(UART)有什么不同?
-
Modbus协议是什么?
-
如果让你设计一款 12路车载超声波雷达,采用 stm32F103+HC-SR04超声波模块,对外提供RS485和Modbus协议,你的设计方案是什么?
二.超声波测距实验过程
1.创建项目
设置sys

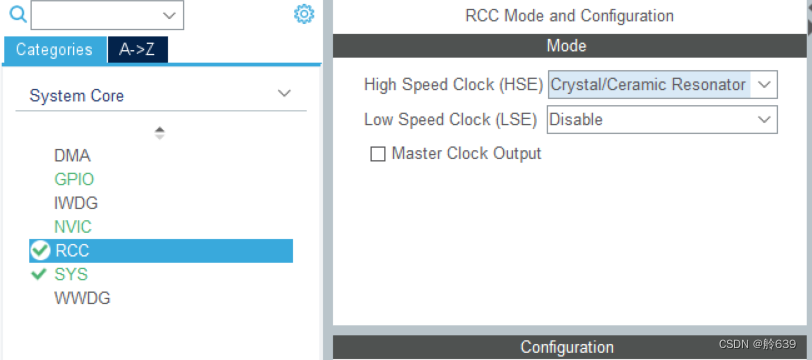
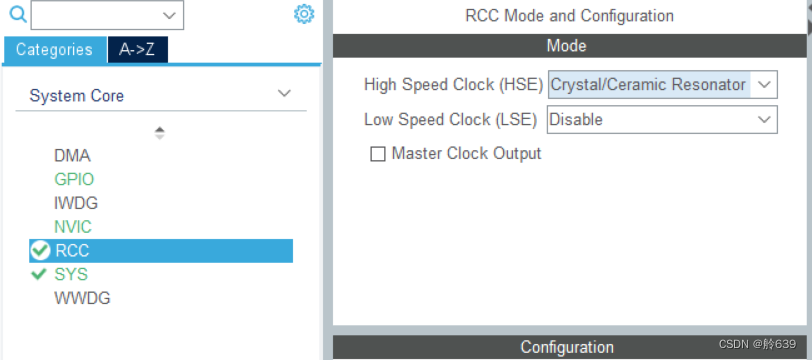
设置rcc
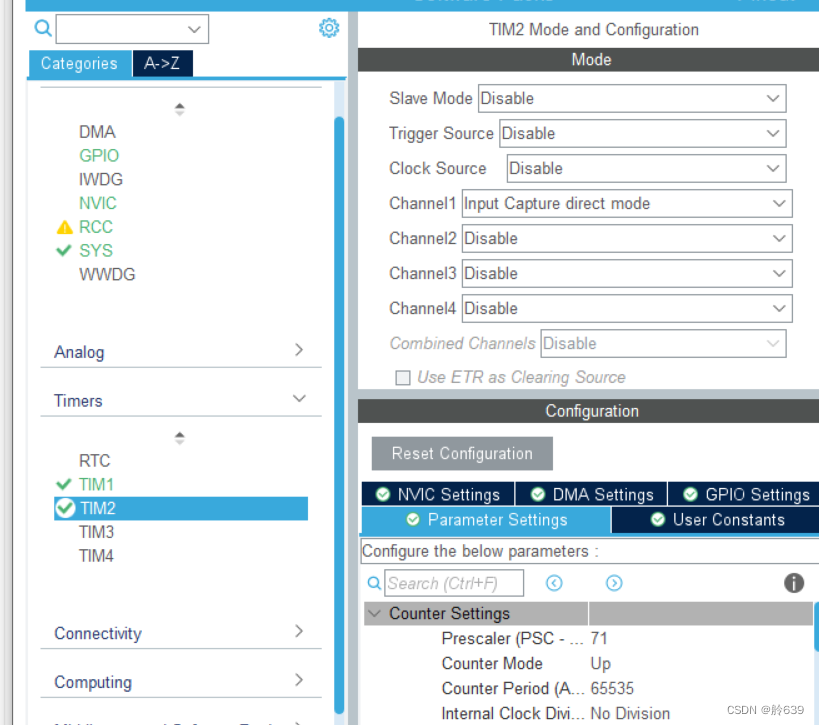
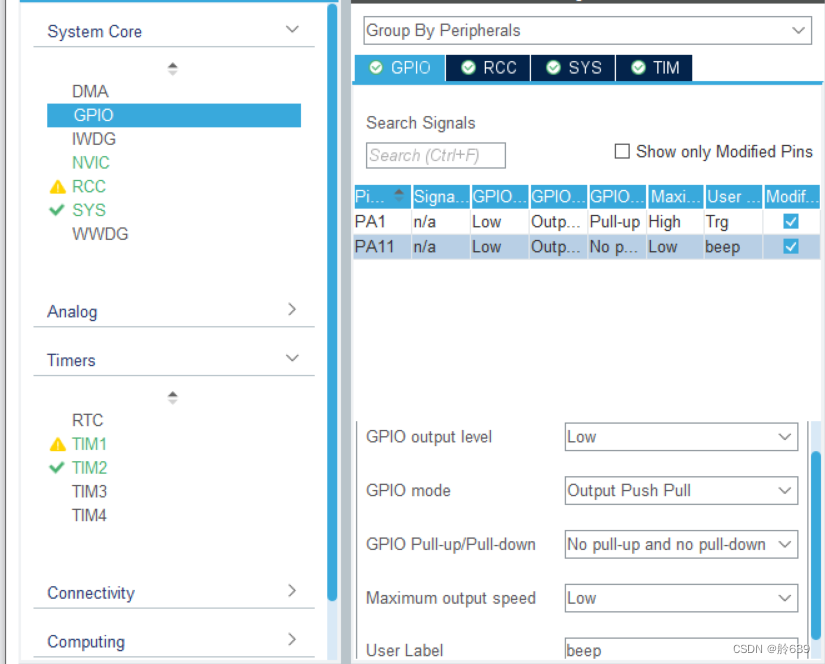
定时器tim2设置
定时器tim3设置
gpio管脚设置:
之后导入RTthread,导入过程参考:https://blog.csdn.net/lxr0106/article/details/134635908
2.编写代码
SC04.h:
#ifndef __SR04_H
#define __SR04_H
#include "main.h"
#include "tim.h"
#include "stdio.h"
#include "rtthread.h"
#define TRIG_H HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_SET)
#define TRIG_L HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_RESET)
extern float distant;
void delay_us(uint32_t us);
void SR04_GetData(void);
void rt_hw_us_delay(rt_uint32_t us);
#endif
SC04.c:
#include "SR04.h"float distant; //测量距离
uint32_t measure_Buf[3] = {0}; //存放定时器计数值的数组
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间//===============================================读取距离
void SR04_GetData(void)
{
switch (measure_Cnt){case 0:TRIG_H;rt_hw_us_delay(30);TRIG_L;measure_Cnt++;__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); //启动输入捕获 或者: __HAL_TIM_ENABLE(&htim5); break;case 3:high_time = measure_Buf[1]- measure_Buf[0]; //高电平时间printf("\r\n----高电平时间-%d-us----\r\n",high_time); distant=(high_time*0.034)/2; //单位cmprintf("\r\n-检测距离为-%.2f-cm-\r\n",distant); measure_Cnt = 0; //清空标志位TIM2->CNT=0; //清空计时器计数break;}
}//===============================================us延时函数void delay_us(uint32_t us)//主频72M
{uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);while (delay--){;}
}
void rt_hw_us_delay(rt_uint32_t us)
{rt_uint32_t ticks;rt_uint32_t told, tnow, tcnt = 0;rt_uint32_t reload = SysTick->LOAD;/* 获得延时经过的 tick 数 */ticks = us * reload / (1000000 / RT_TICK_PER_SECOND);/* 获得当前时间 */told = SysTick->VAL;while (1){/* 循环获得当前时间,直到达到指定的时间后退出循环 */tnow = SysTick->VAL;if (tnow != told){if (tnow < told){tcnt += told - tnow;}else{tcnt += reload - tnow + told;}told = tnow;if (tcnt >= ticks){break;}}}
}//===============================================中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{if(TIM2 == htim->Instance)// 判断触发的中断的定时器为TIM2{switch(measure_Cnt){case 1:measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获measure_Cnt++; break; case 2:measure_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕获 或者: __HAL_TIM_DISABLE(&htim5);measure_Cnt++; }}}main.c:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2022 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "SR04.h"
#include <rtthread.h>/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_USART1_UART_Init();MX_TIM3_Init();/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);/* 创建线程 */rt_thread_t beep_control_task = rt_thread_create("beep_control",/* 线程名称 */beep_control, RT_NULL,1024, 3, 10); //if(beep_control_task != RT_NULL){/* 启动线程 */rt_thread_startup(beep_control_task);rt_kprintf("beep_control_task is already started\n");}else{rt_kprintf("beep_control_task thread is not started\n");}rt_thread_t led_control_task = rt_thread_create("led_control",/* 线程名称 */led_control, RT_NULL,1024, 3, 10); //if(led_control_task != RT_NULL){/* 启动线程 */rt_thread_startup(led_control_task);rt_kprintf("led_control_task is already started\n");}else{rt_kprintf("led_control_task thread is not started\n");}/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */printf("getting...\n");while (1){SR04_GetData();rt_thread_mdelay(1000);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
void beep_control(void* promt){while (1){int distant_int = distant;HAL_GPIO_WritePin(beep_GPIO_Port,beep_Pin,GPIO_PIN_RESET);rt_thread_mdelay(distant_int * 100);HAL_GPIO_WritePin(beep_GPIO_Port,beep_Pin,GPIO_PIN_SET);rt_thread_mdelay(distant_int * 100);}
}
void led_control(void *promt)
{while (1){float pwm_state = (20.0-distant)/20.0;int distant_int = distant;int distant_pwm = (int)(pwm_state*500);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1,distant_pwm);rt_thread_mdelay(1000);}
}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
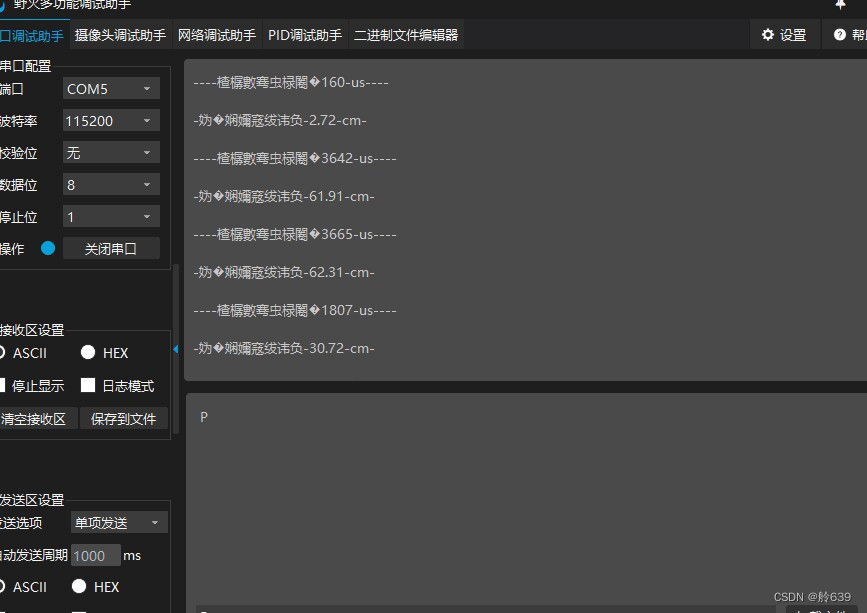
#endif /* USE_FULL_ASSERT */3.实验效果

三. Modbus协议介绍
1. Modbus协议简介
Modbus 是一种应用层协议,主要用于工业自动化领域。它支持多种通信方式,包括RS232、RS485等。Modbus 协议定义了设备之间的通信方式,包括数据格式、错误检测和设备地址等。它允许设备通过Modbus协议进行读写操作,实现数据的交换。
2.RS485与RS232(UART)的不同:
- RS485 是一种差分信号通信协议,具有更强的抗干扰能力,适合长距离通信。它支持多点通信,即一个总线上可以连接多个设备,并且能够通过地址区分不同的设备。
- RS232(也称为UART)是一种单端信号通信协议,通常用于短距离通信,不支持多点通信。它通常用于点对点的通信方式。
3. 设计方案:
- 硬件设计:
- 使用 STM32F103 微控制器作为主控单元,因为它具有足够的处理能力和丰富的外设接口。
- 每个 HC-SR04 超声波模块连接到一个GPIO引脚,用于触发和接收超声波的回波信号。
- 使用RS485通信接口芯片,如 MAX485 或 SP485,连接到微控制器的相应引脚,实现数据的串行通信。
- 软件设计:
- 在STM32F103上编写固件,实现对HC-SR04模块的控制,包括触发超声波发射和读取回波时间。
- 实现Modbus协议栈,处理Modbus RTU(二进制模式)或Modbus TCP(网络模式)的数据包。
- 设计设备地址和功能码,以便在Modbus网络上识别和控制各个超声波雷达。
- 实现错误检测和处理机制,确保数据的准确性和通信的可靠性。
- 通信协议:
- 设计通信协议,定义如何通过RS485发送和接收数据,包括数据帧的格式、起始位、数据位、校验位和停止位。
- 确保Modbus协议的实现能够处理不同类型的功能码,如读取保持寄存器、写入保持寄存器等。
- 系统整合:
- 将硬件和软件整合,进行系统级的测试,确保超声波雷达能够准确测量距离,并通过Modbus协议正确地与外部系统通信。
四.参考文件
https://blog.csdn.net/lxr0106/article/details/139260191




![[深度学习] 卷积神经网络CNN](https://img-blog.csdnimg.cn/direct/450dc28dc9334572906d32387ba2e2e8.png)