文章目录
- 遇到的问题
- 解决思路
- 预览效果
- 详细过程
- 预先构建地图
- 订阅初始估计姿态
- 加载全局地图
- ICP配准计算初始位姿
- 参考
遇到的问题
为了复用上个生命周期录制的轨迹,我需要用到重定位功能,现有的开源方案中,可以实现该功能,但存在以下问题:在预先构建的地图之外,无法实现定位功能。
解决思路
只在初始化原点位姿的时候,进行重定位,使得当前生命周期内的原点和预先构建的地图原点一致,后续操作和lio-sam一样。
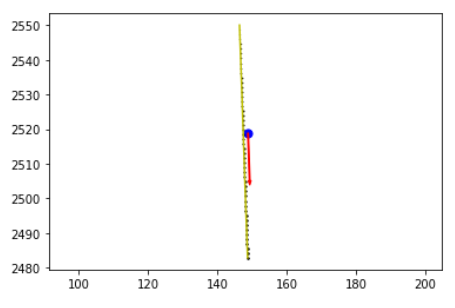
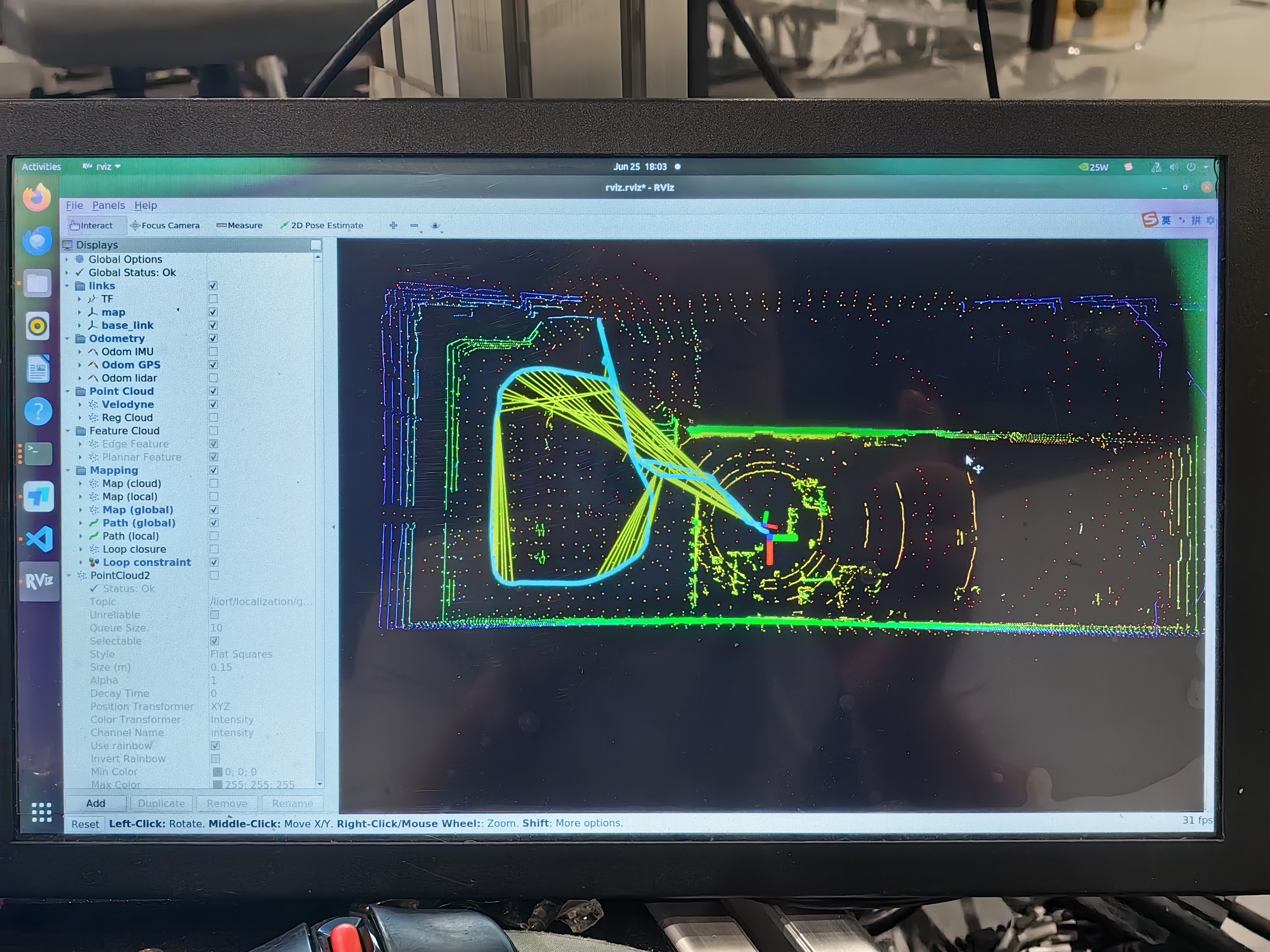
预览效果
预先构建的地图
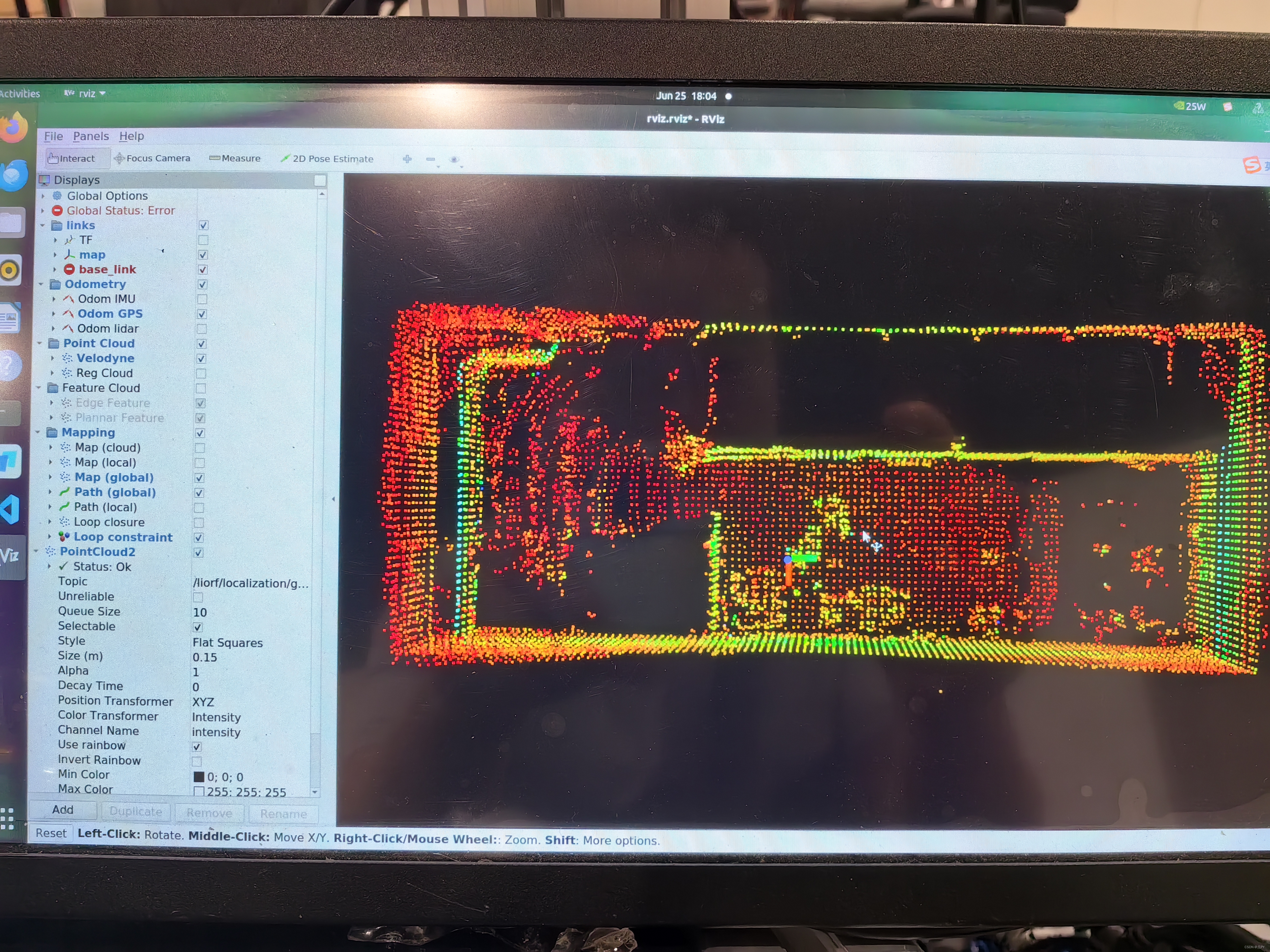
初始化后进行增量建图
详细过程
预先构建地图
参考https://py1995.blog.csdn.net/article/details/137286327?spm=1001.2014.3001.5502
订阅初始估计姿态
在rviz中添加2d pose estimate
void