yolov10对于大目标的效果好,小目标不好
一、如果你训练过yolov5,yolov8,的话那么你可以直接用之前的环境就行
目录
一、如果你训练过yolov5,yolov8,的话那么你可以直接用之前的环境就行
二、配置好后就可以配置文件了
三、然后开始训练
推理图片
转化onnx模型
具体你可以看我另一篇的文章,yolov5-7.0实现训练推理以及C#部署onnx-CSDN博客
我这是配置的cuda 调用GPU的版本,下载可以再我的博文里下载
cuda各个版本的Pytorch下载网页版,模型转化工具,免费gpt链接_cuda国内镜像下载网站-CSDN博客
安装的教程可以直接再网上搜索既可以了
二、配置好后就可以配置文件了
下载源码 GitHub - THU-MIG/yolov10: YOLOv10: Real-Time End-to-End Object Detection
建议你手动下载预训练模型,和在命令行中运行训练,因为你用右键run有可能直接下载 v8的预训练模型。
下载预训练模型 Https://github.com/jameslahm/yolov10/releases/download/v1.0/yolov10s.pt
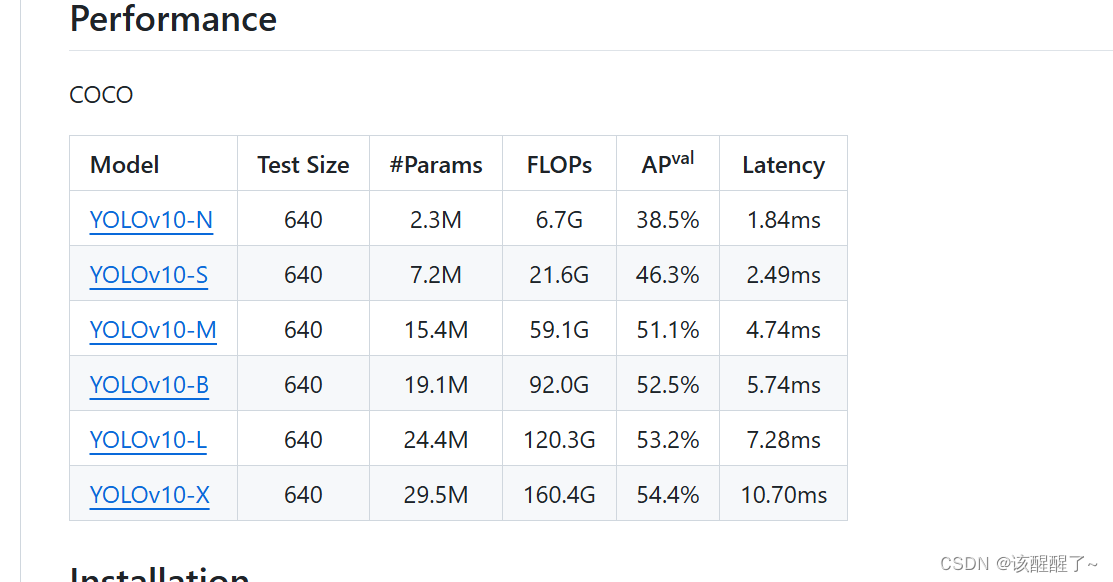
最小模型是N 最大模型是X 区别就是,越小的就越快,精度相对的会低一点点,越大的就越慢,精度会高一点,建议用S和M的比较中和,设备不行的就用N
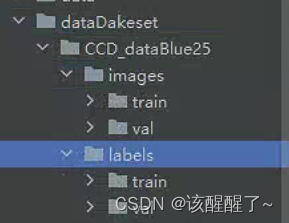
用labelimg标注后这种放,和yolov5一样,coco数据集
然后再目录中创建一个data文件夹,再其中创建一个data.yaml的文件
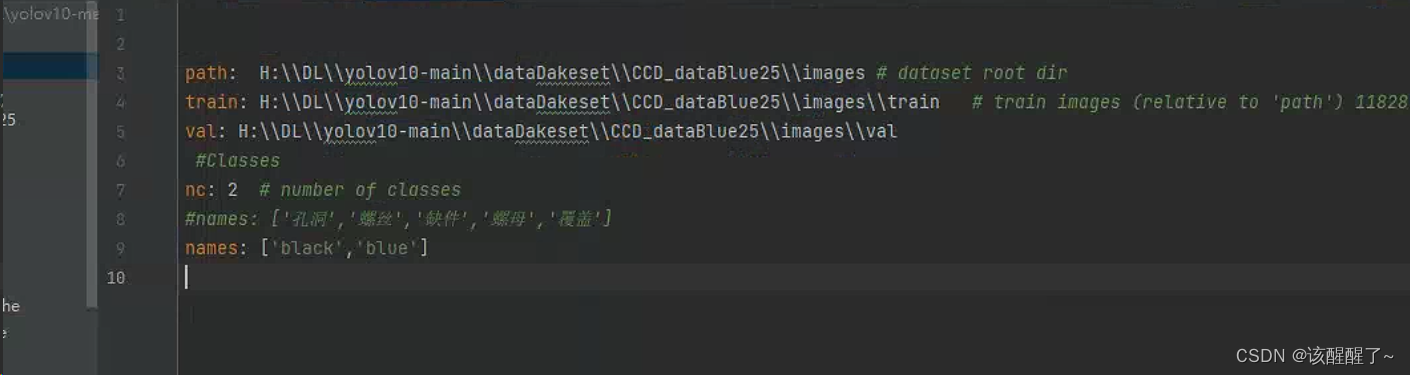
然后配置数据集读取路径
三、然后开始训练
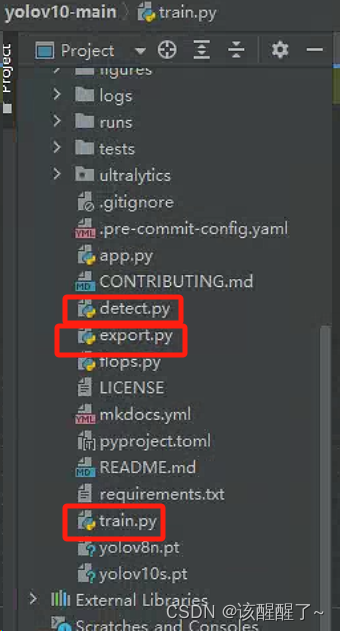
你可以在目录中创建三个文件,detect.py,export.py,train.py文件像这样
填入代码
train.py
from ultralytics import YOLOv10model_yaml_path = "ultralytics/cfg/models/v10/yolov10s.yaml"
#数据集配置文件
data_yaml_path = 'data/data.yaml'
#预训练模型
pre_model_name = 'yolov10s.pt'if __name__ == '__main__':#加载预训练模型model = YOLOv10(model_yaml_path).load(pre_model_name)#训练模型results = model.train(data=data_yaml_path,epochs=150,batch=4,name='train/exp')打开v10算法代码文件夹的根目录 在路径中写cmd回车
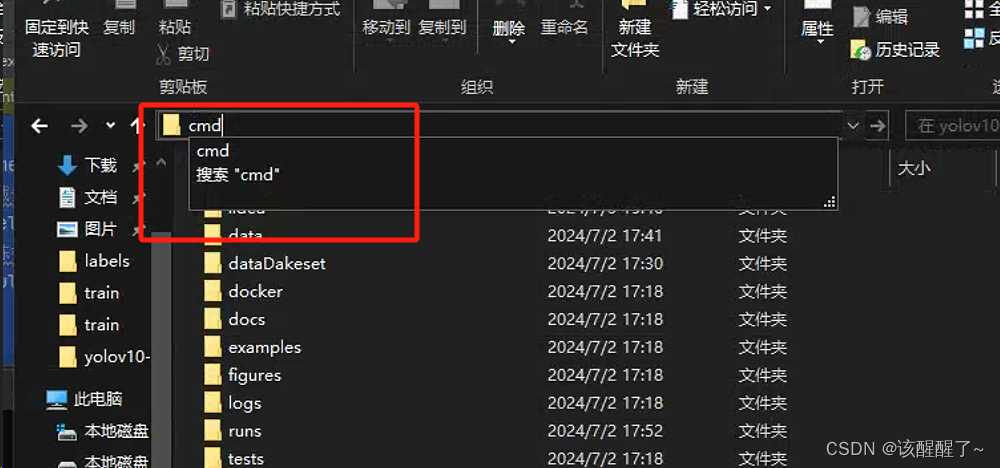
进入这里,查看你的环境
用代码
conda activate 你的环境名然后就进入了

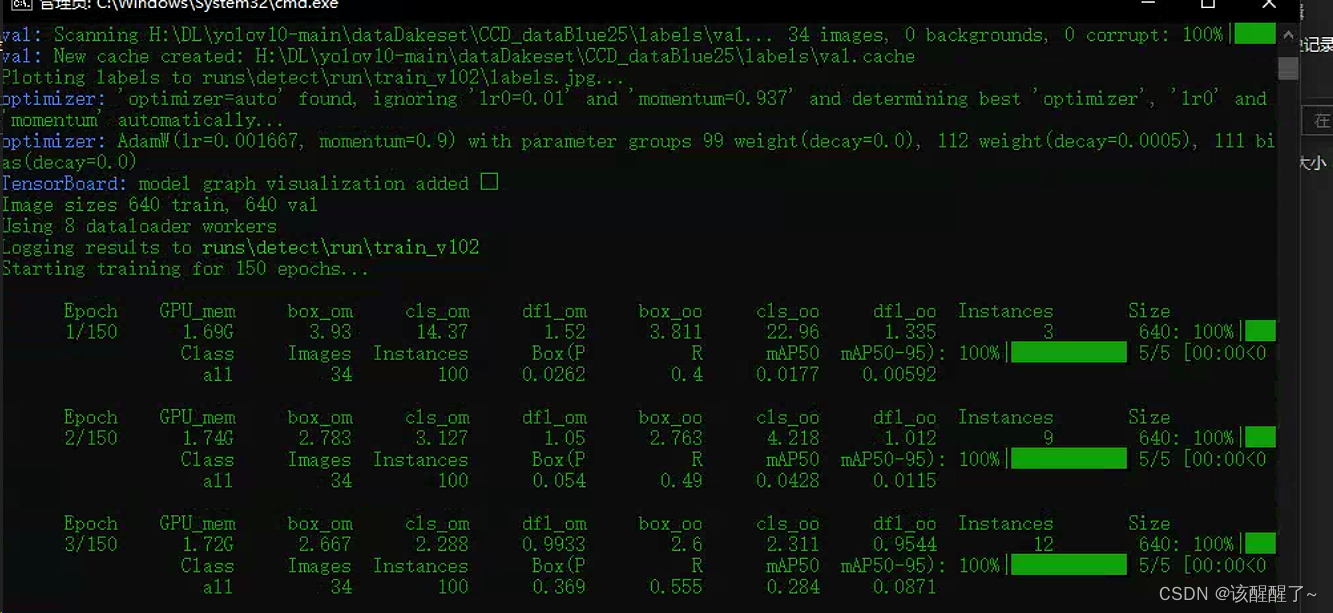
直接运行 --cache 是用你的磁盘跑,如果电脑不牛逼 加上这个 可以提升速度
python train.py --cache
然后就可以运行了
四、推理图片
打开刚刚创建的detect.py文件 添加代码 就可以推理了
from ultralytics import YOLOv10import torch
if torch.cuda.is_available():device = torch.device("cuda")
else:raise Exception("CUDA is not")model_path = r"H:\\DL\\yolov10-main\\runs\\detect\\train\\exp\\weights\\best.pt"
model = YOLOv10(model_path)
results = model(source=r'H:\DL\yolov10-main\dataDakeset\CCD_dataBlue25\test',name='predict/exp',conf=0.45,save=True,device='0')
五、转化onnx模型
打开刚刚创建的export.py 文件 添加代码,转哪中模型直接替换onnx就行
from ultralytics import YOLOv10
model=YOLOv10("H:\\DL\\yolov10-main\\runs\\detect\\train\\exp\\weights\\best.pt")model.export(format='onnx')
# help='torchscript, onnx, openvino, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, paddle'自此yolov10python的训练推理转化流程全部结束,有问题可以评论区问或者私信