对焦算法可以分为测距式,相位式,反差式。
其中测距式是通过激光,(TOF,Time of Flight)等主动式地得知物距,然后对焦。更常用的是后两者。
反差式CDAF(Contrast Detection Auto Focus)

反差式如上图所示,可以看到镜头明显有“拉风箱”一般的往复推拉,遍历得到一个对比度最好的结果。这种对焦方法相对精准,但耗时较长。
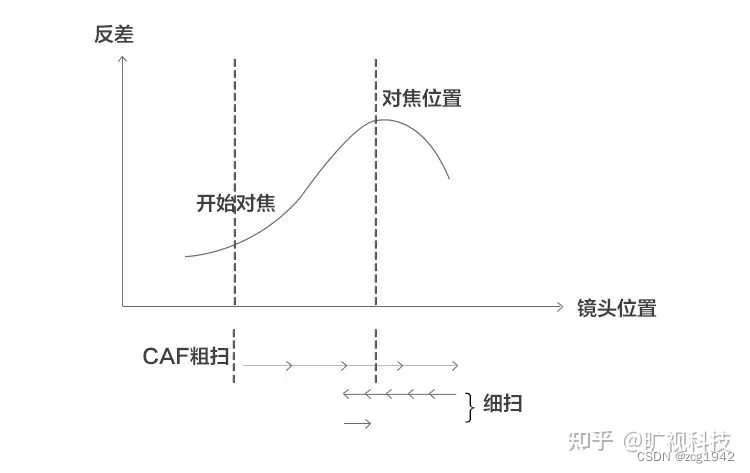
CDAF具体使用的是爬山算法。爬山算法包含两个过程,第一阶段叫粗扫(Coarse Search),第二阶段叫细扫(Fine Search)。算法控制马达移动镜头朝一个方向移动时,图像对比度会出现逐渐增大然后变小的过程,类似爬山。
相位式PDAF(Phase Detection Auto Focus)
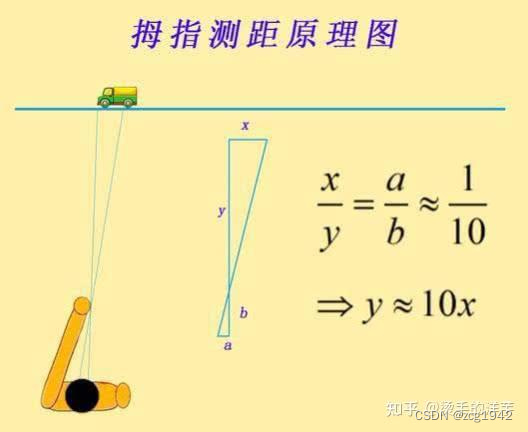
先来了解一下双眼效应和拇指测距。
两个眼睛因为位置不同,他们的最佳对焦点是不同的,分别需要特定角度的光线才能成最清晰的像。所以拇指测距时,分别用两只眼睛对着拇指,沿着这个方向的延长线在目标物中可以得到不同的两点。这两点的长度/瞳距=目标距离/手臂长度。
知乎日报 - 知乎
既然拇指测距可以测得距离,那么PDAF也是一样的道理。PDAF根据像素对(PD Pixel Pair)的相位差衡量ROI区域的清晰度。
那么什么是相位差呢?PDAF怎么利用相位差呢?
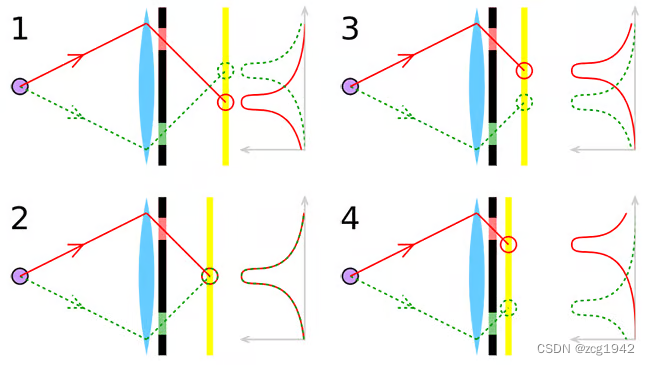
上图中虽然光线只画了一路(对称的),但是实际上光线不会是一条,所以在sensor上的响应是以其为波峰的分布。如果没有对焦好,那么会存在两个波峰,子图4比子图3对焦更差,两个波峰的距离就越远。当对焦完美时,两个波峰重叠。
因为对称的缘故,两个波的形状是一样的,只是有一个相对的偏移量,这个偏移就是相位差。相位差可能是正数可能是负数,相位取0时清晰度最高。
因为出厂的时候标定过,所以只需要知道相位差,马达马上就知道该把镜头往哪个方向推,推多远,这也是为什么PD对焦更快的原因。PDAF对焦速度比CAF快一倍以上,是现在手机上的主流。
How Phase Detection Autofocus Works
由微分的思想,波可以使用两个有差异性的点表示。这两个点如何构造,出现了多种PD sensor。按照PD点的个数可以分为稀疏的和全局的。我们都以全像素All-pixel为例。
Dual PD
dual PD把每个像素进一步细分。dual的含义就是“双重的”,因为同样属于shield pd,但相比于更早的L和R隔了很远,dual PD的左右PD同在一个微透镜下:

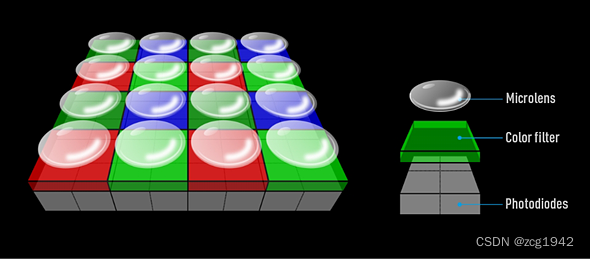
每个color filter下面有两个二极管:

对焦阶段两种光电二极管分别成像,在对焦完成后真正成像的阶段,两个光电二极管合并起来,所以不会存在相位差的干扰。
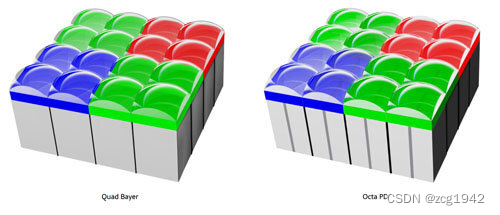
当dual PD技术和quad bayer结合起来,就是Octa PD:
OCL
OCL是“On-Chip Lens”的缩写,它指的是几个相邻的像素共享感光元件上的微透镜。有2x1OCL,有2x2OCL。
2x2ocl指ocl技术和quad bayer联合起来。同一个颜色通道的四个象限共用一个透镜:
当光照条件好的时候可以remoisc得到高分辨率图像,光照差的时候通过bining可以得到更好的画质。
二者的区别
二者都是全像素级别的PD对焦。区别只是相位差的来源不一样,Octa PD是更传统的dual PD,2x2OCL是共用透镜带来的四个象限的差异。
前者真正成像时得益于有两个二极管,所以可以合并,消除相位差,这样因为quad raw同一个颜色通道的四个值更加统一。而2x2OCL相位差无法消除,同一个颜色通道的四个象限在成像时也会和图像梯度有规律地变化,不利于后续图像处理。
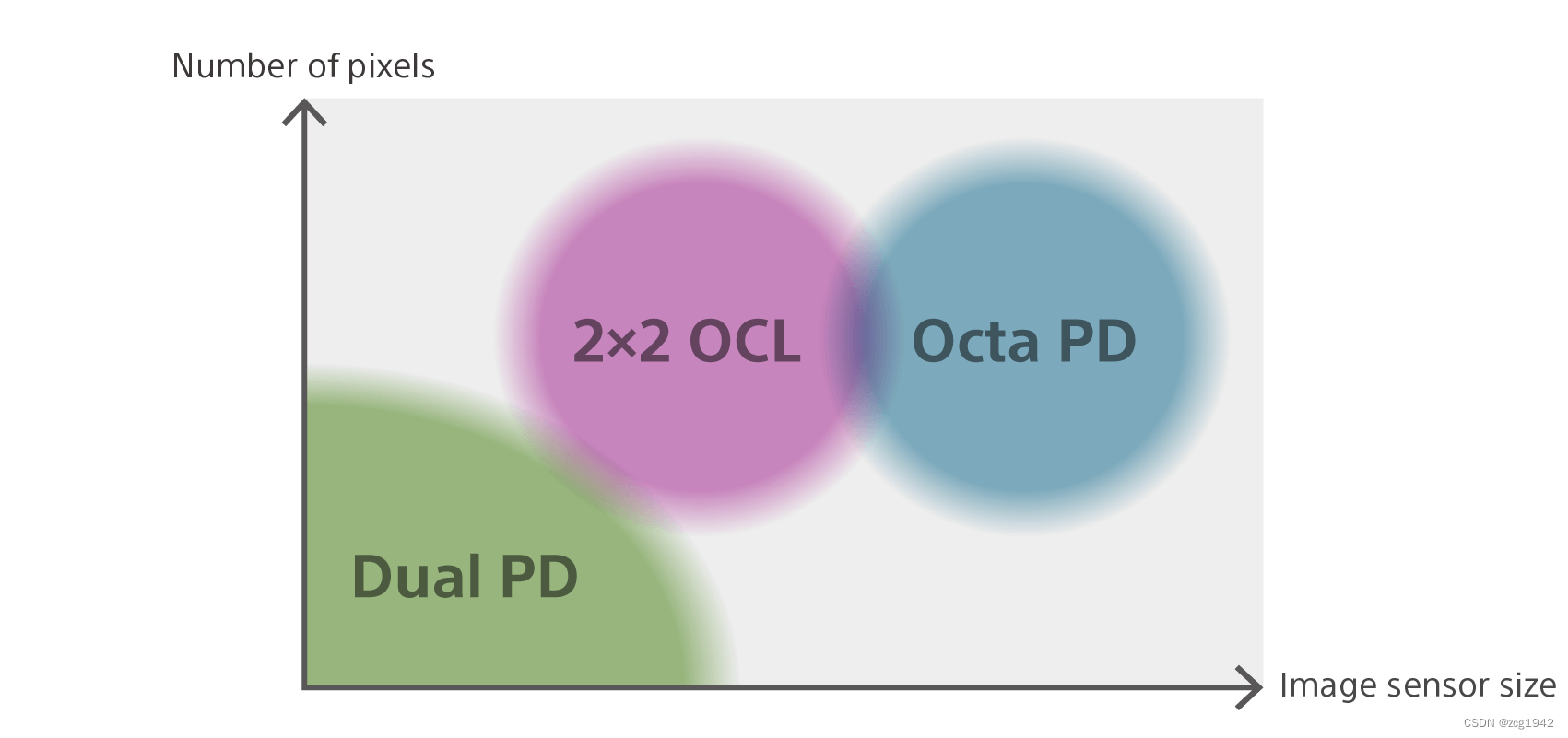
Octa PD因为要集成两个二极管,微透镜数目也更多,所以一般当sensor较大时使用这种技术;OCL则使用在中型sensor上。如下图所示:
在实际中,一般是先使用PD对焦,快速将镜头推到大致准确的位置,然后再进行反差式对焦,让图像真正达到对比度高的理想状态。
reference:
All-pixel Auto Focus (AF) Technology | Image Sensor for Mobile | Technology | Sony Semiconductor Solutions Grouphttps://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8993499All-pixel Auto Focus (AF) Technology | Image Sensor for Mobile | Technology | Sony Semiconductor Solutions Group
https://www.ovt.com/products/ov50a/
Sony unveils 2x2 on-chip lens tech for Quad Bayer sensors, which promises better AF performance - GSMArena.com news