1 范围
本文件规定了智能网联汽车场景数据车载采集平台的定义,以及车载采集平台的搭建要求及方法。
本文件规定智能网联汽车自然驾驶场景数据采集物理平台功能要求,同时规定了采集平台系统构成及各系统性能指标要求。
本文件规定的智能网联汽车场景数据车载采集平台所采集的场景数据,主要用于智能网联汽车产品或软件的功能测试。
本文件适用于在中国(除港澳外)区域公共道路上行驶的智能网联汽车场景数据车载采集平台。
场景数据采集的种类、范围、方式、精度,以及数据存储、转运等活动,需遵守国家法律相关规定,并取得相关采集资质后方可进行。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 11552 乘用车内部凸出物要求
GB 11566 乘用车外部凸出物要求
GB/T 19392 车载卫星导航设备通用规范
ISO 7637 道路车辆-由传导和耦合引起的电磁干扰(Road vehicles — Electrical disturbances fromconduction and coupling)
ISO 11452 道路车辆 用窄带发射的电磁能量进行电子干扰 部件试验方法(Road vehicles —Component test methods for electrical disturbances from narrowband radiated electromagnetic energy)
ISO 16750 道路车辆-电子电气设备的环境条件和试验条件(Road vehicles — Environmental conditions and testing for electrical and electronic equipment)
3 术语和定义
下列术语和定义适用于本文件。
3.1 智能网联汽车 intelligent & connected vehicle ICV
智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与 X(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。
3.2 道路交通参与者 road traffic participants
带有一定的行为目的,处于道路交通环境中的可自主移动目标,包括但不限于行人、车辆或其它交通工具等。
3.4 驾驶场景 driving scenario
一定时间和空间范围内车辆驾驶行为与交通环境中的其他车辆、行人、道路、设施、天气及光照的综合反映,用于描述本车、交通参与者、道路及环境等信息。
3.5 场景采集平台 driving scenario collection platform
包括摄像头、毫米波雷达、激光雷达、定位设备等传感器和数据记录设备,用于获取驾驶场景的平台系统。
3.6 点云 point cloud
以离散、不规则方式分布在三维空间中的点的集合。
4 总体要求
4.1 场景数据车载采集平台基本构成
车载采集平台硬件包括车辆主体、环境感知传感器、数据记录设备、数据存储设备、定位设备、供电设备和人机交互设备,以及相关的线束和支架等,负责从车辆端收集并记录场景信息。
4.2 场景数据车载采集平台总体要求
车载采集平台记录并存储场景信息,场景数据需要满足后期场景应用的需求。场景数据主要应用于以下三个方面:
-
典型场景或特殊场景的提取和复现,用于泛化仿真测试或场地测试的测试用例;
-
对典型场景目标或场景片段进行标记,实现标签化标注;
-
场景关键要素的解构提取,以及利用解构得到的场景要素进行场景重构。
要求采集平台具备以下功能:
-
记录驾驶任务和任务变更;
-
记录交通环境信息、场景关键要素驾驶员及车辆信息以及设备状态信息,其精度和误差满足数据应用需求;
-
具备足够的数据存储空间,实现数据记录存储,且数据可转移;
-
车载设备时间校准同步,空间坐标统一,并能够在数据采集期间维持。
5 场景数据车载采集平台硬件要求
5.1 硬件总体要求
车载场景采集平台采用的所有车载设备应符合ISO 16750、ISO 7637、ISO 11452、ISO 20653、GB/T19392标准的要求。
车载场景采集平台硬件包括车辆主体、环境感知传感器、数据记录设备、数据存储设备、定位设备、供电设备和人机交互设备,以及相关的线束和支架等,详情可参考附录A。
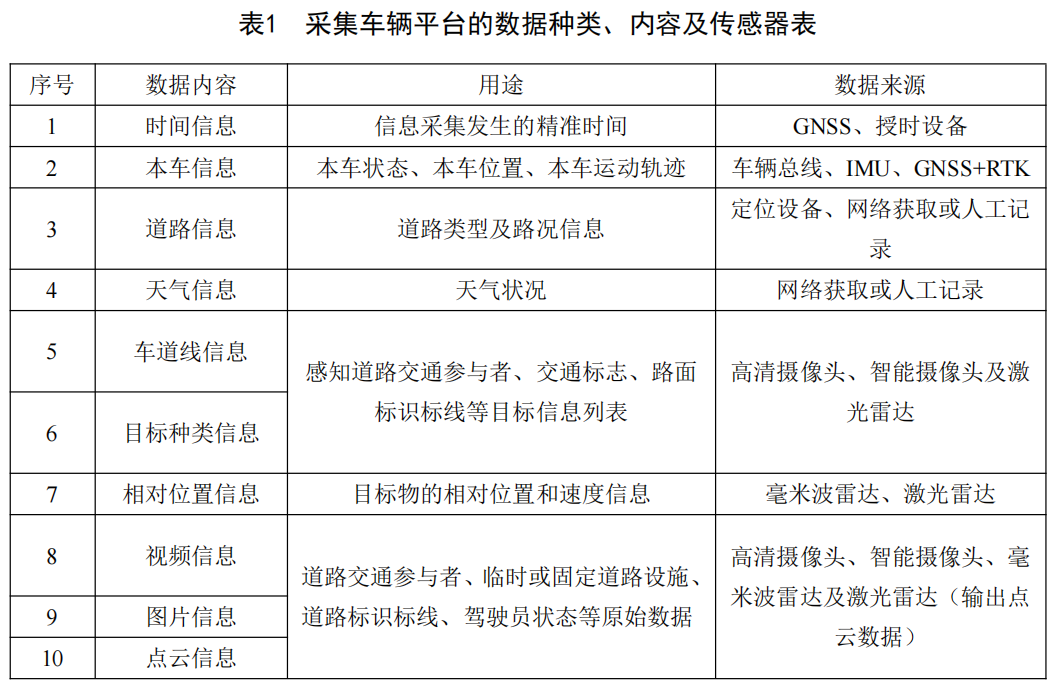
车载场景采集平台所产生的数据种类、用途及数据来源详见下表。
5.2 硬件选型方法和要求
5.2.1 车辆选型
车辆为采集平台提供运行基础。车辆的驾驶行为和车辆状态数据是场景的重要组成部分,车辆总线需提供以下数据:
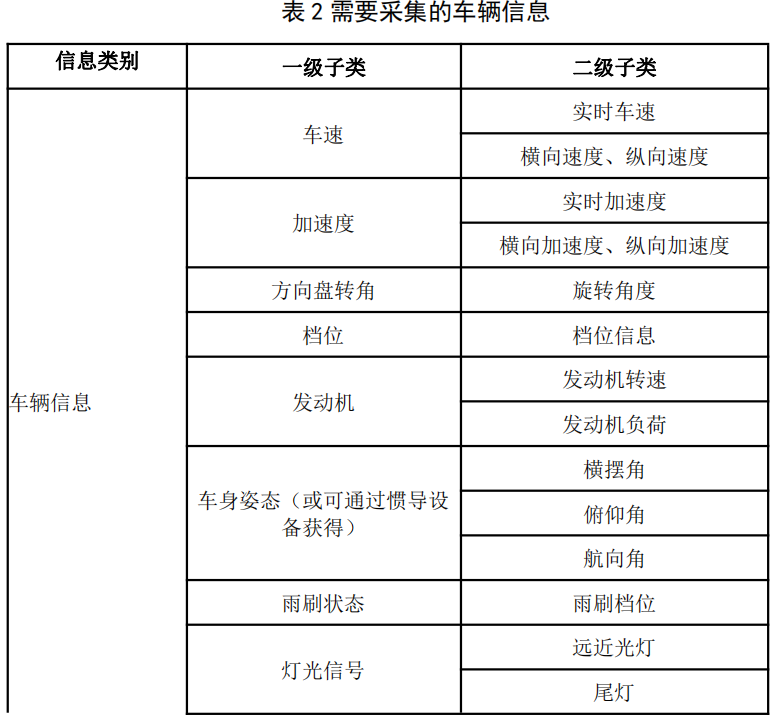
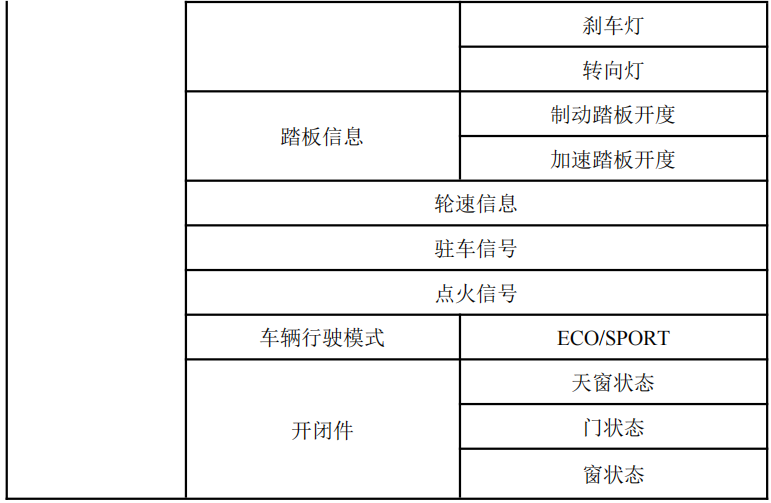
上述信息为描述场景的必备要素,是场景应用的基础信息。采集的场景数据将至少包含上述信息,以满足后期场景数据处理的需求。
5.2.2 环境感知传感器选型
5.2.2.1 环境感知传感器选型概述
场景采集所采用的环境感知传感器用于记录车辆行驶时的外部环境信息和驾驶员信息。场景采集平台常用的环境感知传感器,按其上报数据的类型,可分为以下2类:
a) 记录外部环境信息的传感器;
b) 记录驾驶室内部的环境感知传感器。
5.2.2.2 记录外部环境信息的传感器
此类传感器按输出数据的类型,可分为两类。
a) 第一类传感器记录外部原始环境信息,涵盖交通参与者、道路和建筑、交通标识标线等所有外部环境信息。
数据覆盖全部场景要素,多为非结构化数据。常见的数据形式包括图片、视频和激光点云、毫米波点云等。
在数据处理时,该类传感器除了提交记录数据之外,还需要提供必要的内部参数和安装信息,作为数据处理时的修正值输入。
b) 第二类传感器可提供目标列表,传感器重点感知外部环境当中的交通参与者、交通标识、道路标线等重要的场景要素。传感器捕捉要素特征并进行识别,将识别的结果以目标列表的形式提交。
数据覆盖重点场景要素,多为结构化数据。
传感器数据用于场景提取和切分,形成典型场景数据集或特殊场景数据集,用于自动驾驶控制算法训练。常见的数据形式包括目标列表等。
为满足测试要求,此类数据需具备良好的通用性。
在数据处理时,该类传感器除了提交记录数据之外,还需要提供必要的数据解析协议或工具。
5.2.2.3 记录驾驶室内部信息的感知传感器
此类传感器重点采集驾驶员和座舱内成员信息,包括驾驶员动作和驾驶员状态,以及干扰驾驶员的外部因素等。
上述信息通常采用视频+音频的方式记录。
车内信息涉及用户隐私,数据采集的信息所涵盖范围、数据用途等,需在采集开始前知会驾乘人员。
5.2.3 数据记录设备选型
数据记录设备汇聚所有的数据,运行场景采集软件,实现数据的汇入和处理。
数据记录设备要具备和所有数据源通信的能力,要具备能够满足所有数据源接入所需的物理接口和软件驱动。
如果数据记录设备本身的物理接口无法满足要求,可选配扩展坞或接口转换器等外挂辅助设备对接口进行扩展和转换。
数据记录设备须匹配人机交互设备,便于操作人员对系统进行维护和管理。
5.2.4 存储设备选型数据上传
数据存储设备有多种硬盘格式,须选择数据记录设备支持的格式。
可根据每次采集的数据量来选择合适的存储容量。存储空间以能够支撑1-2天的采集任务为宜。
数据存储设备要易于拆装,便于数据拷贝。
5.2.5 定位设备选型
定位设备用于获取车辆的实时位置和运动轨迹,辅以惯性单元和导航地图,可以记录采集车辆行驶的路线和路况等信息。
目前通用的定位设备包括GPS、GLONASS和北斗定位系统形成的组合全球导航定位系统(GNSS)。
为保证定位效果,支持接收的定位星系应不少于两种。
场景采集平台要求定位精度在0.5米之内,实现车道级定位。
5.3 设备安装要求
5.3.1 总体要求
车辆加装设备时,不可改变车辆原有外观、结构、颜色、标志等,如涉及车辆改装,须到主管部门报备。
5.3.2 车载场景采集平台传感器安装要求
传感器须遵循厂商安装建议,重点关注传感器特性引起的注意事项,不可超出其工作环境要求和防水防尘要求规定的范围。
所有设备安装必须牢固可靠,行驶过程中不允许出现共振。
车外设备及支架安装时需考虑风阻,可通过整流罩或其它方式降低风阻。
若使用乘用车平台,驾驶室外传感器的安装方式应满足GB 11566的要求;驾驶室内传感器的安装方式应满足GB 11552的要求。
5.3.3 场景采集车辆平台线束要求
加装线束须满足ISO 7637要求。
线束接插件、线束长度和线束类型须根据传导信号的要求进行选型。
线束须尽量避免阳光直射,远离发热器件。
加装线束须标明线束编号、标明其传导的信号名称。
在协议不明确,或没有明确证据表明可以混接的前提下,信号线不可混接。
线束应成束布置,外观整齐,避开产生电磁干扰的零部件及车载的大电流电源线。
固定点应布置合理,固定可靠,避免与周围零部件干涉。
5.3.4 车载场景采集平台支架要求
加装设备支架不可破坏车辆主体结构。
传感器布置位置相近时,传感器及支架之间不可干涉、遮挡、覆盖。
5.4 设备电源和功率要求
车载场景采集平台电源设计应满足以下要求:
a) 场景采集平台所有设备电源均来自车载蓄电池和车辆发电机。
b) 须设置总开关电源、过载保护等装置,确保设备和车辆安全。
c) 可以配置备用电源;场景采集平台配备备用电源或断电保护设备,不可采用车载蓄电池为备用电源充电的方式充电,亦不可使用车载发电机为其充电;
d) 供电线径选择:须严格评估用电设备峰值功耗和线束负载能力,不可过载。
e) 采集设备搭载后,电平衡计算方式按照采集设备全天候工作核算;
f) 按照相应采集设备搭载基础车辆的电平衡计算方法进行核算,发电机输出功率需大于车载用电总功率;
g) 采集设备控制器、传感器暗电流需满足车辆要求,车辆下电后,采集设备全部断电;
h) 采集设备系统需要单独配备总保险。采集控制器及传感器均需供电保险,保证同一类型传感器或控制器单独供电,保险值及供电线径根据用电功率核算;
i) 采集系统需设置电源总开关,用于设备的上电下电的总控制开关;
j) 如无电源保护措施、一键控制开关,不可将原车蓄电池作为电源。
6 场景数据车载采集平台软件要求
6.1 总体要求
数据采集软件需具备数据接入功能,数据采集功能,数据存储功能,人机交互功能,自诊断与告警功能等。
6.2 软件功能要求
6.2.1 数据接入功能
数据采集软件需具备接入待采集数据的功能。需要采集的数据为满足智能网联汽车场景应用需求的数据。一般包括但不限于如下数据:高清摄像头数据,环视摄像头数据,毫米波雷达数据,激光雷达数据,GNSS数据,整车CAN总线数据等。
6.2.2 人机交互功能
数据采集软件需具备友好的人机交互功能。使得用户可以通过屏幕显示、语音等方式获得系统运行状态信息等。可以通过鼠标、键盘等方式操作数据采集软件、发出控制指令、调整运行参数等。
6.2.3 自诊断和告警功能
数据采集软件需具备自诊断与告警功能,以保证整机和各模块子系统正常稳定运行。当系统某部分出现故障时,能够通过自诊断功能检测出该故障,并能通过屏幕显示、语音等方式发出告警信息。
6.2.4 数据采集功能
数据采集软件需具备数据采集功能,将接入到采集设备中的数据进行实时采集和缓存。
6.2.5 数据存储功能
数据采集软件需具备将采集到的数据存储到非易失存储器的功能,以便进行持久化存储和后续数据处理。
6.3 运行环境要求
基本运行环境需具备CPU的处理能力和内存大小能够满足对采集的多源大容量高带宽数据进行实时采集处理与存储。非易失存储器的容量至少能够满足单次数据采集作业所需的存储容量。
7 系统调试方法和要求
7.1 传感器调试方法
7.1.1 传感器覆盖范围要求
根据环境对车辆驾驶行为的影响大小,结合自动驾驶汽车场景数据需求,场景采集应覆盖车体周围360度范围,且无开放盲区。车辆行进方向有效探测距离不小于150米,后方有效探测距离不小于70米,左右侧向有效探测距离不小于20米。在该范围内,必须有至少两种传感器覆盖。
7.1.2 传感器校准
环境感知类传感器须按照各自技术要求和使用手册进行校准,保证其测量误差在允许的范围之内。
7.1.3 传感器标定
车辆坐标系:以车的后轴中心在地面的投影为原点。车辆前进方向为X轴正方向,驾驶员侧为Y轴正方向,向上为Z轴正方向。
传感器空间标定:进行外部环境感知的传感器需要将其标定到车体坐标系。该标定过程可以通过将所有传感器各自标定至车体或先将所有传感器标定至一个传感器,再将该传感器标定至车体的方式进行。
不同类型的传感器由于工作原理和数据结构不同,需结合传感器自身特点,选择合适的方案进行标定。
进行车辆内部数据采集的传感器不需要进行空间标定,按照传感器工作要求安装即可。
标定参数格式:标定参数需要以统一格式进行保存。建议使用x,y,z,roll,pitch,yaw六个参数进行表示。
其中x,y,z为偏移量,单位为米(m);roll,pitch,yaw为偏转角,单位为弧度(rad)。
传感器偏移量设置:每个传感器相对于原点的三维坐标值,作为偏移量进行补偿。如传感器有偏转,偏转角也需要测量并补偿。
多传感器空间标定:传感器偏移量设置完成之后,需要对关联传感器进行标定,消除多传感器之间的误差。多传感器空间标定通过实测数据进行。
7.2 数据记录设备调试方法
7.2.1 总则
所有接入数据记录设备的数据协议不可冲突;如有冲突,必须协调解决。
系统调试时,要检验自诊断和告警功能的有效性和实时性。
数据记录设备运行数据采集软件,要确保数据接入、采集和存储过程中,数据的完整性和安全性。
数据采集过程中,需检测数据完整性。
7.2.2 数据完整性
设备硬件接线完成后,打开进入软件,调出场景采集软件的每个功能界面,查看数据是否正常接入。
设备数据正常接入后,可根据需求进行如下测试。
物理可靠性调试:端口振动、防水、插拔测试;线路防干扰测试(电磁、温湿度);传输距离测试。
硬件状态显示调试:设备接入指示;设备断开指示;设备负载率指示。
存储完整性测试:存储介质种类与存储完整性测试;存储介质数据接口与存储完整性测试。
7.2.3 数据安全性加密措施
数据接入端加密,包括传感器自带或外挂加密模块。可采用以下方式:
a) 传感器端数据软件加密后发送;
b) 传感器端数据硬件加密后发送。
c) 数据采集端加密,包括数据采集接口自带或外挂加密模块,可采用以下方式:
d) 数据采集端软件加密后显示或存储;
e) 数据采集端硬件加密后显示或存储。
f) 数据存储加密,可采用以下方式:
g) 设置权限:给予软件最高的 root 权限,给用户一般权限,只有 root 权限才能访问数据源存储文件夹,但该方法主要的问题在于不能有效防止数据源加密。
h) 源文件加密:对文件头进行加密;或对整个文件进行加密。
i) 自建格式:自建一种压缩格式,在文件的头部等位置加入新的信息形成有区别与现有格式的新格式。
附 录 A(资料性)一种车载场景采集平台的设计方案和要求
A.1 基于乘用车的场景采集平台
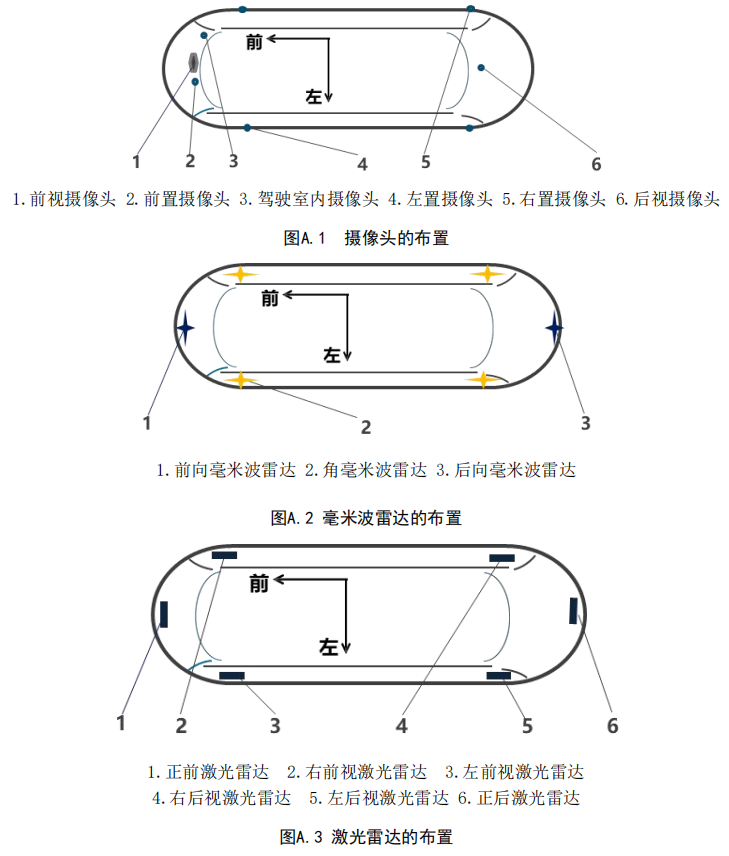
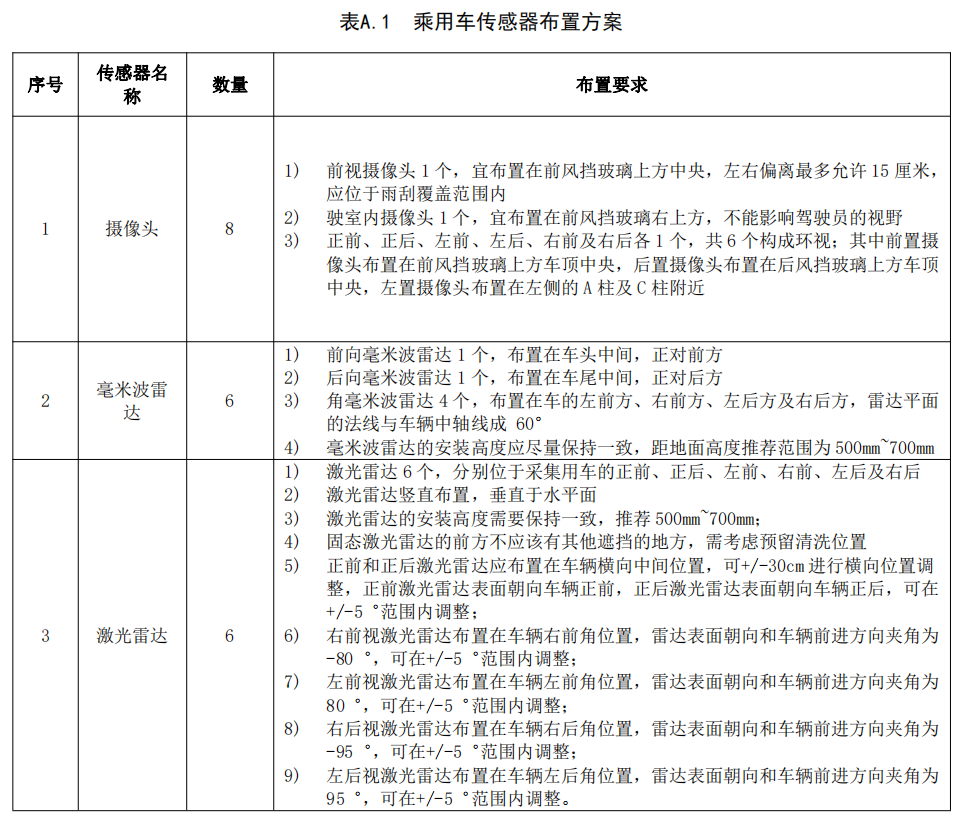
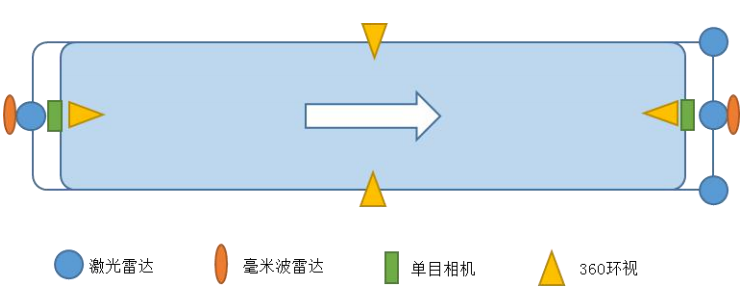
基于乘用车的场景采集平台的环境感知模块中摄像头、毫米波雷达及激光雷达的布置分别详见图A.1、图 A.2 及图 A.3,布置可参考表 A.1:
A.2 基于商用车的车载场景采集平台
商用车传感器布置方案见表A.2。
| 序号 | 设备名称 | 数量 | 布置要求 |
|---|---|---|---|
| 1 | 组合导航 | 1 | 提供车辆定姿定位信息 |
| 2 | 前视高清摄像头 | 2 | 用于车辆前方目标的识别 |
| 3 | 环视高清摄像头 | 4 | 用于车辆周围目标的识别 |
| 4 | 后视高清摄像头 | 1 | 用于车辆后方目标的识别 |
| 5 | 前向毫米波雷达 | 1 | 用于探测车辆前方目标物的距离及速度,受天气状况限制小,可识别机动车和行人等障碍物中远距离目标 |
| 6 | 后向毫米波雷达 | 1 | 用于探测车辆后方目标物的距离及速度 |
| 7 | 激光雷达 | 4 | 用于探测车辆周围中短距离目标物 |
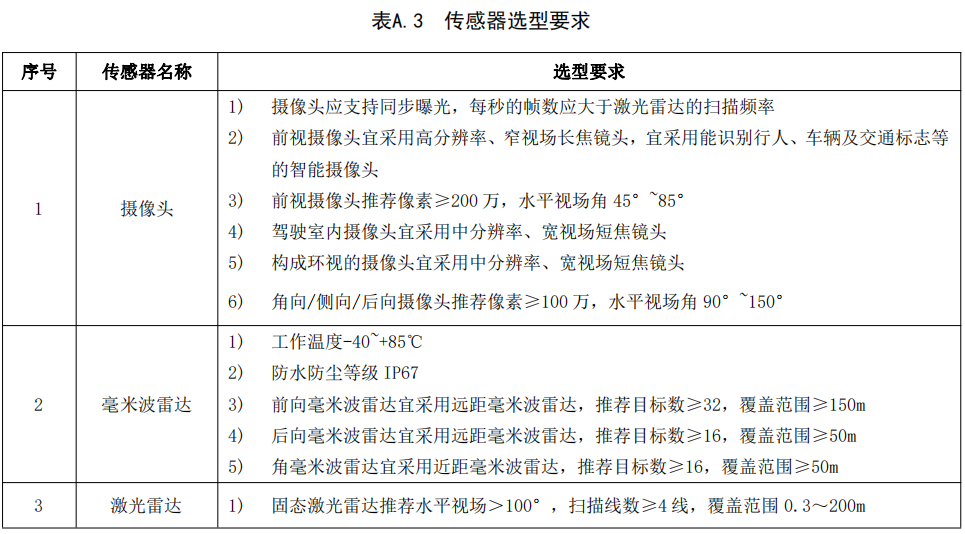
A.3 环境感知模块中传感器的选型
环境感知模块中摄像头、毫米波雷达及激光雷达的选型详见下表。