简单版
import cv2
import numpy as npdef dehaze(image):"""简单去雾算法,使用直方图均衡化来增强图像"""# 将图像转换为YUV颜色空间yuv_image = cv2.cvtColor(image, cv2.COLOR_BGR2YUV)# 对Y通道(亮度)进行直方图均衡化yuv_image[:, :, 0] = cv2.equalizeHist(yuv_image[:, :, 0])# 将YUV图像转换回BGRdehazed_image = cv2.cvtColor(yuv_image, cv2.COLOR_YUV2BGR)return dehazed_imagedef derain(image):"""简单去雨算法,使用高通滤波器去除细小的雨滴噪声"""# 转换为灰度图像gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 使用高通滤波器去除雨滴high_pass_filter = cv2.GaussianBlur(gray_image, (21, 21), 0)derained_image = cv2.subtract(gray_image, high_pass_filter)# 增强对比度derained_image = cv2.equalizeHist(derained_image)# 将灰度图转换回BGR格式derained_image = cv2.cvtColor(derained_image, cv2.COLOR_GRAY2BGR)return derained_image# 加载图像
image = cv2.imread('input_image.jpg')# 去雾处理
dehazed_image = dehaze(image)# 去雨处理
derained_image = derain(dehazed_image)# 保存或展示结果
cv2.imwrite('output_image.jpg', derained_image)
cv2.imshow('Result', derained_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
升级版
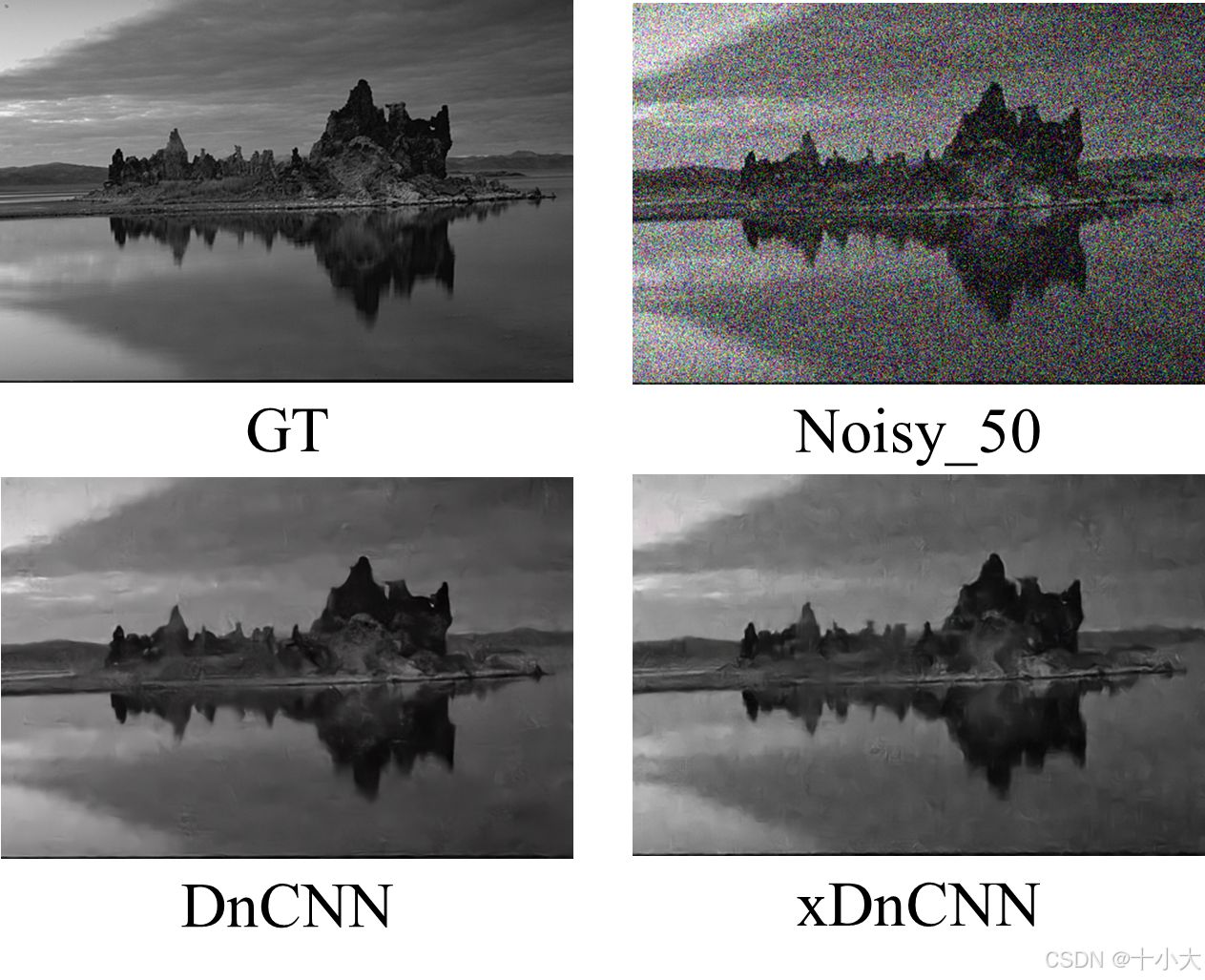
这段代码实现了一个基于**暗通道先验(Dark Channel Prior)**的图像去雾算法,主要流程是通过计算暗通道、估计大气光、推测透射率并利用引导滤波器改善透射率,然后恢复图像的对比度和清晰度。
效果:



import PIL.Image as Image
import skimage.io as io
import numpy as np
import time
from gf import guided_filter
from numba import jit
import matplotlib.pyplot as pltclass HazeRemoval(object):def __init__(self, omega=0.95, t0=0.1, radius=7, r=20, eps=0.001):passdef open_image(self, img_path):img = Image.open(img_path)self.src = np.array(img).astype(np.double)/255.# self.gray = np.array(img.convert('L'))self.rows, self.cols, _ = self.src.shapeself.dark = np.zeros((self.rows, self.cols), dtype=np.double)self.Alight = np.zeros((3), dtype=np.double)self.tran = np.zeros((self.rows, self.cols), dtype=np.double)self.dst = np.zeros_like(self.src, dtype=np.double)@jitdef get_dark_channel(self, radius=7):print("Starting to compute dark channel prior...")start = time.time()tmp = self.src.min(axis=2)for i in range(self.rows):for j in range(self.cols):rmin = max(0,i-radius)rmax = min(i+radius,self.rows-1)cmin = max(0,j-radius)cmax = min(j+radius,self.cols-1)self.dark[i,j] = tmp[rmin:rmax+1,cmin:cmax+1].min()print("time:",time.time()-start)def get_air_light(self):print("Starting to compute air light prior...")start = time.time()flat = self.dark.flatten()flat.sort()num = int(self.rows*self.cols*0.001)threshold = flat[-num]tmp = self.src[self.dark>=threshold]tmp.sort(axis=0)self.Alight = tmp[-num:,:].mean(axis=0)# print(self.Alight)print("time:",time.time()-start)@jitdef get_transmission(self, radius=7, omega=0.95):print("Starting to compute transmission...")start = time.time()for i in range(self.rows):for j in range(self.cols):rmin = max(0,i-radius)rmax = min(i+radius,self.rows-1)cmin = max(0,j-radius)cmax = min(j+radius,self.cols-1)pixel = (self.src[rmin:rmax+1,cmin:cmax+1]/self.Alight).min()self.tran[i,j] = 1. - omega * pixelprint("time:",time.time()-start)def guided_filter(self, r=60, eps=0.001):print("Starting to compute guided filter trainsmission...")start = time.time()self.gtran = guided_filter(self.src, self.tran, r, eps)print("time:",time.time()-start)def recover(self, t0=0.1):print("Starting recovering...")start = time.time()self.gtran[self.gtran<t0] = t0t = self.gtran.reshape(*self.gtran.shape,1).repeat(3,axis=2)# import ipdb; ipdb.set_trace()self.dst = (self.src.astype(np.double) - self.Alight)/t + self.Alightself.dst *= 255self.dst[self.dst>255] = 255self.dst[self.dst<0] = 0self.dst = self.dst.astype(np.uint8)print("time:",time.time()-start)def show(self):import cv2cv2.imwrite("img/src.jpg", (self.src*255).astype(np.uint8)[:,:,(2,1,0)])cv2.imwrite("img/dark.jpg", (self.dark*255).astype(np.uint8))cv2.imwrite("img/tran.jpg", (self.tran*255).astype(np.uint8))cv2.imwrite("img/gtran.jpg", (self.gtran*255).astype(np.uint8))cv2.imwrite("img/dst.jpg", self.dst[:,:,(2,1,0)])io.imsave("test.jpg", self.dst)if __name__ == '__main__':import syshr = HazeRemoval()hr.open_image(sys.argv[1])hr.get_dark_channel()hr.get_air_light()hr.get_transmission()hr.guided_filter()hr.recover()hr.show()