更多优质内容,请关注公众号:智驾机器人技术前线
1.论文信息
-
论文标题:BiEquiFormer: Bi-Equivariant Representations for Global Point Cloud Registration
-
作者:Stefanos Pertigkiozoglou*, Evangelos Chatzipantazis∗ and Kostas Daniilidis
-
作者单位:宾夕法尼亚大学
-
论文地址:https://arxiv.org/abs/2407.08729
2.摘要
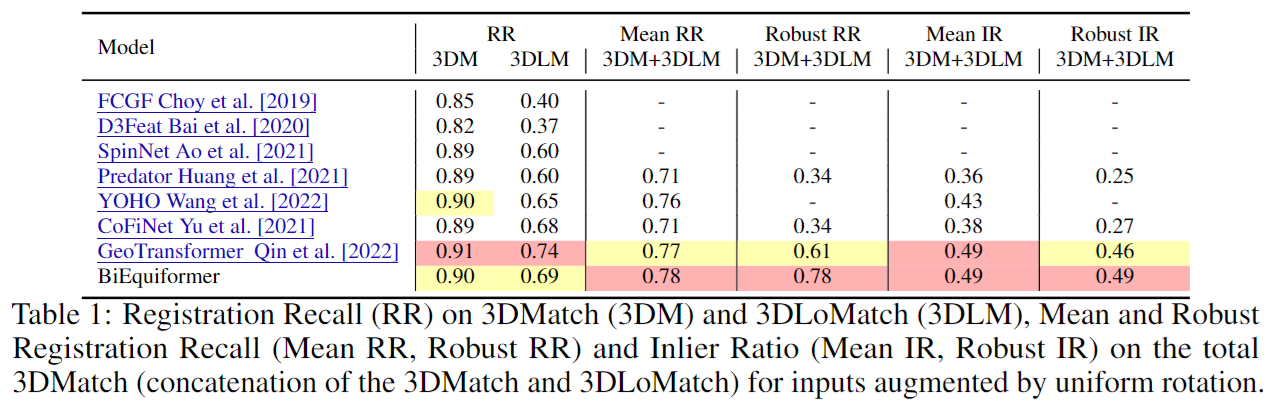
本文的目标是解决全局点云配准(PCR)问题,即在不考虑扫描的初始姿态的情况下,找到点云之间的最优对齐。由于计算约束,这个问题对于传统的优化方法来说非常具有挑战性。首先,我们展示了当点云在空间中任意放置时,最先进的深度学习方法会出现巨大的性能下降。我们提出应该利用等变深度学习来解决这个任务,并且我们描述了PCR的特定类型的双等变性。然后,我们设计了BiEquiformer,这是一个新颖且可扩展的双等变流程,即对输入点云的独立变换是等变的。虽然一种简单的做法是独立处理点云,但我们设计了表达力强的双等变层,这些层融合了来自两个点云的信息。这使我们能够提取高质量的超点对应关系,进而实现稳健的点云配准。与最先进的方法的广泛比较表明,我们的方法在3DMatch和具有挑战性的低重叠3DLoMatch数据集的鲁棒设置中,在规范设置中实现了可比的性能,并在鲁棒设置中实现了更优越的性能。
3.主要贡献
-
研究了在输入点云的刚性变换下,最先进方法的鲁棒性。在文中展示了许多流行的最先进方法在点云的初始姿态变化时性能下降的情况,当扫描之间的重叠度变小时,这种性能下降更加严重;
-
建模并描述了PCR的特定双等变性属性。然后本文提出了新颖的层,这些层处理不变的、等变的以及不同类型的双等变特征,这些特征通过融合点云之间的信息来扩展标准的等变层;
-
结合这些层,本文提出了一种新颖的、可扩展的等变点云配准流程。本文方法确保了一致的配准结果,无论输入点云的初始配置如何,都能在鲁棒设置中实现了最先进的配准精度,特别是在低重叠数据集中。
4.核心思想与方法
BiEquiFormer 是一个基于注意力的双等变流程,用于全局点云配准(PCR)。首先,等变内部点自注意力和点间交叉注意力层更新点上的标量和向量特征。然后使用双等变特征将输入向量对齐到同一框架,再应用等变交叉注意力。输出的不变粗特征用于提取一组候选粗匹配,这些匹配由精细点匹配模块处理以提取候选变换。使用从局部到全局的变换方案计算最终估计。在第一次变换估计之后(全局步骤),我们可以通过将双等变框架对齐块与当前旋转估计切换来迭代地应用 BiEquiFormer(局部步骤)。
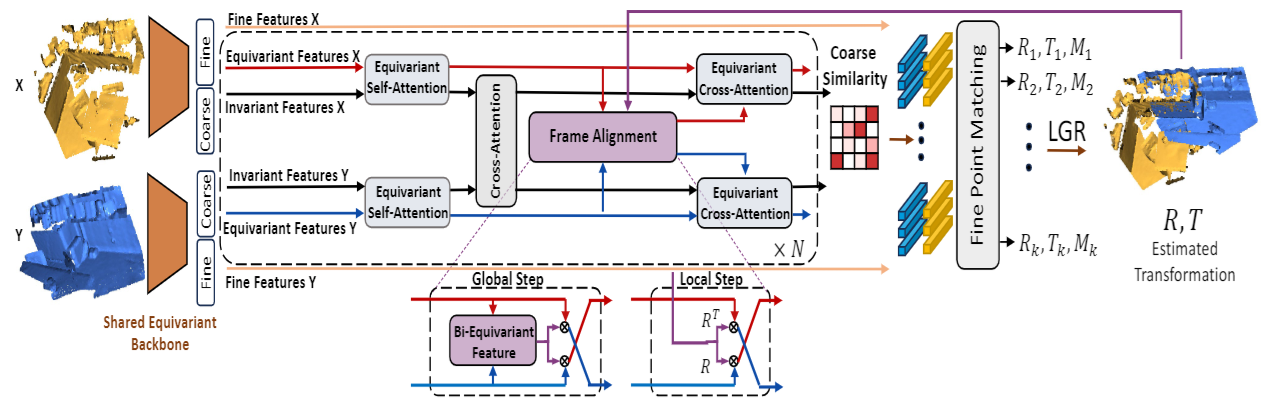
本文算法框架
5.实验仿真验证


6.总结 && 展望
在这项工作中,我们提出了一个新的双等变流程来解决全局PCR任务,即在不假设输入点云有良好初始猜测的情况下进行配准。我们研究了当前深度学习方法在输入扫描的姿态上的鲁棒性,并观察到,特别是在低重叠设置中,性能大幅下降。我们提出通过利用等变深度学习来解决这个问题,并制定并描述了PCR的双等变属性。由于标准的旋转等变层有较大的内存开销,但更重要的是,它们分别从每个点云提取特征,我们提出构建新颖的、富有表现力的双等变层,在提取每点特征的同时融合两个点云的信息。我们使用这些层构建了BiEquiformer,这是一个可扩展到场景级扫描中大量点的双等变注意力架构。我们在3DMatch和具有挑战性的3DLoMatch数据集上评估了我们的方法,表明我们的方法能够实现与其他非等变和等变最先进方法相当的甚至更优越的性能,特别是在鲁棒性指标上。
我们相信,对PCR的双等变性的明确制定和描述可以扩展到其他问题,例如机器人操作中的拾取和放置任务。我们有信心,我们在这项工作中设计的双等变层对这些任务也将是有益的。作为一个限制,我们指出尽管该方法在鲁棒性情况下实现了最先进的性能,但在规范设置中存在一个小差距。我们认为这可以归因于流程第一步中的VNN特征提取器的表现力。然而,目前高阶可控特征提取器还不能扩展到场景级扫描。


本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线










![[解决]Invalid configuration `aarch64-openwrt-linux‘: machine `aarch64-openwrt](https://i-blog.csdnimg.cn/direct/c07f401a825d4dbd82948999c1c875e8.png)