嗨喽大家好呀,今天阿鑫给大家带来的是c++进阶——哈希表,好久不见啦,下面让我们进入本节博客的内容吧!
c++进阶——哈希表
- 枚举的介绍
- unordered系列的底层结构
- 哈希表的改造
哈希是一种思想(映射),哈希表(值和存储位置建立的映射关系)是一种数据结构。
1.枚举
某些具有相同类别的变量没有支持的类型,用枚举来自定义一组命名的整数常量(0,1,2)来解决这一问题
与结构体的具有多个成员不同,每个枚举类型的变量都只能选择一个成员变量,但都属于自定义类型
注意:成员只能是枚举常量,这些常量在定义时会被赋予整数值(默认为从0开始的递增整数,但可以显式指定)。是一组整数值,但是有名字,提高了代码的可读性(0,1,2三个数可以表示三种颜色)
简单说:三个名字表示三种情况,但是这三个名字底层都是整数值

#include <iostream> // 定义一个枚举类型Weekday,用于表示星期几
enum Weekday { Monday, Tuesday, Wednesday, Thursday, Friday, Saturday, Sunday
}; int main() { // 声明一个Weekday类型的变量today,并将其初始化为Wednesday Weekday today = Wednesday; // 使用switch语句根据today的值执行不同的操作 switch (today) { case Monday: std::cout << "今天是星期一" << std::endl; break; case Tuesday: std::cout << "今天是星期二" << std::endl; break; case Wednesday: std::cout << "今天是星期三" << std::endl; break; case Thursday: std::cout << "今天是星期四" << std::endl; break; case Friday: std::cout << "今天是星期五" << std::endl; break; case Saturday: std::cout << "今天是星期六" << std::endl; break; case Sunday: std::cout << "今天是星期日" << std::endl; break; } return 0;
}

2. unordered系列的底层结构
unordered系列的关联式容器之所以效率比较高,是因为其底层使用了哈希结构。

2.1常见的哈希函数
1.直接定址法(用key的值映射一个绝对位置或相对位置)
优点:快,没有冲突
缺点:只适合范围集中

2.除留余数法(key模表的大小后,都可以映射到表中一个位置)
hashi = key%N(N是表的大小)
哈希冲突:不同的值取模后的值,映射到了表中的相同位置
2.2解决哈希冲突的方法
-
闭散列:开放地址法->去其他位置(规则)找一个空的位置

-
开散列:哈希桶

#pragma once
#include<vector>
enum State//状态标记
{EXIST,EMPTY,EDLETE
};
template<class K,class T>
struct HashData
{pair<K, V> _kv;State _state = EMPTY;
};template<class K, class V>
class HashTable
{
private:vector<HashData<K, V>> _tables;size_t _n =0//表中存储数据个数
};


扩容时进行了Insert的复用
bool Insert(const pair<K, V>& kv){如果key已经存在则插入失败if (Find(kv.first))return false;// 扩容if (_n * 10 / _tables.size() >= 7){//vector<HashData<K, V>> newTables(_tables.size() * 2); 遍历旧表, 将所有数据映射到新表 ...//_tables.swap(newTables);HashTable<K, V, Hash> newHT;newHT._tables.resize(_tables.size() * 2);for (size_t i = 0; i < _tables.size(); i++){if (_tables[i]._state == EXIST){newHT.Insert(_tables[i]._kv);}}_tables.swap(newHT._tables);}Hash hs;size_t hashi = hs(kv.first) % _tables.size();while (_tables[hashi]._state == EXIST){++hashi;hashi %= _tables.size();}_tables[hashi]._kv = kv;_tables[hashi]._state = EXIST;++_n;return true;}
由于在实现Erase时,只是单纯将某个位置的状态标记置空,并没有抹除数据,所以在Find时,需要同时满足状态标记为存在以及key值相等才能返回true。
HashData<K, V>* Find(const K& key){Hash hs;size_t hashi = hs(key) % _tables.size();while (_tables[hashi]._state != EMPTY){if (_tables[hashi]._state == EXIST&& _tables[hashi]._kv.first == key){return &_tables[hashi];}++hashi;hashi %= _tables.size();}return nullptr;}bool Erase(const K& key){HashData<K, V>* ret = Find(key);if (ret == nullptr){return false;}else{ret->_state = DELETE;return true;}}
哈希表需要支持类型之间的相互转换,因此需要提供一个哈希函数
当仿函数实现的功能相同,但是接受对象的类型不同时,就需要实现仿函数的特化
- 可以和整形之间相互转化
template<class K>
struct HashFunc
{size_t operator()(const K& key){return (size_t)key;}
};
- 类似string类型不能和整形之间相互转换,需要支持一个特化的HashFunc
template<>
struct HashFunc<string>
{size_t operator()(const string& key){size_t hash = 0;for (auto e : key){hash *= 31;hash += e;}return hash;}
}

namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;HashNode(const pair<K, V>& kv):_kv(kv),_next(nullptr){}};template<class K, class V, class Hash = HashFunc<K>>class HashTable{typedef HashNode<K, V> Node;public:HashTable(){_tables.resize(10, nullptr);}private:vector<Node*> _tables; // 指针数组size_t _n = 0; // 表中存储数据个数};

和闭散列直接插入(先new节点,再delete节点)不同,节点的重复利用可以节省时间
bool Insert(const pair<K, V>& kv){Hash hs;size_t hashi = hs(kv.first) % _tables.size();// 负载因子==1扩容if (_n == _tables.size()){/*HashTable<K, V> newHT;newHT._tables.resize(_tables.size() * 2);for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while(cur){newHT.Insert(cur->_kv);cur = cur->_next;}}_tables.swap(newHT._tables);*/vector<Node*> newtables(_tables.size() * 2, nullptr);for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while (cur){Node* next = cur->_next;// 旧表中节点,挪动新表重新映射的位置size_t hashi = hs(cur->_kv.first) % newtables.size();// 头插到新表cur->_next = newtables[hashi];newtables[hashi] = cur;cur = next;}_tables[i] = nullptr;}_tables.swap(newtables);}// 头插Node* newnode = new Node(kv);newnode->_next = _tables[hashi];_tables[hashi] = newnode;++_n;return true;}
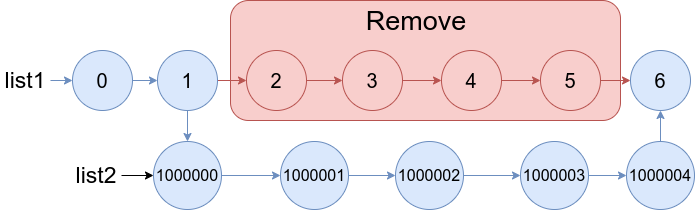
节点的删除分为头节点和其他节点
头节点:指针数组中的指针指向头节点的下一个节点
其余节点:当前节点的前一个节点指向当前节点的下一个节点,释放当前节点

bool Erase(const K& key)
{Hash hs;size_t hashi = hs(key) % _tables.size();Node* prev = nullptr;Node* cur = _tables[hashi];while (cur){if (cur->_kv.first == key){if (prev == nullptr){_tables[hashi] = cur->_next;}else//此时说明销毁节点不是头节点{prev->_next = cur->_next;}delete cur;--_n;return true;}prev = cur;cur = cur->_next;}return false;
}
下面给出一份完整的闭散列解决哈希冲突的实现代码
namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;HashNode(const pair<K, V>& kv):_kv(kv),_next(nullptr){}};template<class K, class V, class Hash = HashFunc<K>>class HashTable{typedef HashNode<K, V> Node;public:HashTable(){_tables.resize(10, nullptr);}~HashTable(){// 依次把每个桶释放for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while (cur){Node* next = cur->_next;delete cur;cur = next;}_tables[i] = nullptr;}}bool Insert(const pair<K, V>& kv){Hash hs;size_t hashi = hs(kv.first) % _tables.size();// 负载因子==1扩容if (_n == _tables.size()){/*HashTable<K, V> newHT;newHT._tables.resize(_tables.size() * 2);for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while(cur){newHT.Insert(cur->_kv);cur = cur->_next;}}_tables.swap(newHT._tables);*/vector<Node*> newtables(_tables.size() * 2, nullptr);for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while (cur){Node* next = cur->_next;// 旧表中节点,挪动新表重新映射的位置size_t hashi = hs(cur->_kv.first) % newtables.size();// 头插到新表cur->_next = newtables[hashi];newtables[hashi] = cur;cur = next;}_tables[i] = nullptr;}_tables.swap(newtables);}// 头插Node* newnode = new Node(kv);newnode->_next = _tables[hashi];_tables[hashi] = newnode;++_n;return true;}Node* Find(const K& key){Hash hs;size_t hashi = hs(key) % _tables.size();Node* cur = _tables[hashi];while (cur){if (cur->_kv.first == key){return cur;}cur = cur->_next;}return nullptr;}bool Erase(const K& key){Hash hs;size_t hashi = hs(key) % _tables .size();Node* prev = nullptr;Node* cur = _tables[hashi];while (cur){if (cur->_kv.first == key){if (prev == nullptr){_tables[hashi] = cur->_next;}else{prev->_next = cur->_next;}delete cur;--_n;return true;}prev = cur;cur = cur->_next;}return false;}private://vector<list<pair<K, V>>> _tables; // 指针数组//struct Bucket//{// list<pair<K, V>> _lt;// map<K, V> _m;// size_t _bucketsize; // >8 map <=8 list//};//vector<Bucket> _tables;vector<Node*> _tables; // 指针数组size_t _n = 0; // 表中存储数据个数};