摘要
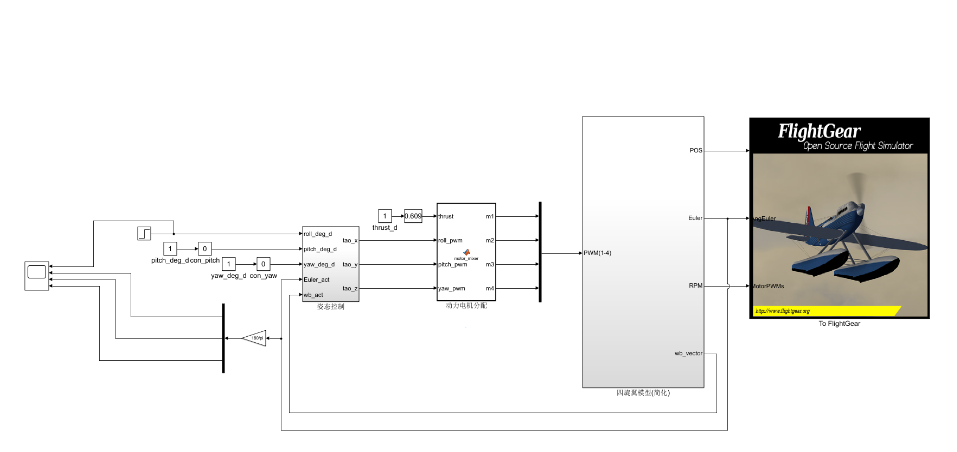
本项目的目标是通过 Simulink 建模和仿真,研究四旋翼无人机的建模、姿态控制、定点位置控制及航点规划功能。无人机建模包含了动力单元模型、控制效率模型和刚体模型,并运用这些模型实现了姿态控制和位置控制。姿态控制为无人机的平稳飞行提供基础,而位置控制则帮助无人机进行精确的空间定位。通过给定一系列航点,完成了航点规划功能的验证。仿真结果表明,系统设计的控制算法简单高效,具有良好的跟踪效果和稳定性。
理论
四旋翼无人机是多旋翼飞行器的一种,其控制原理基于姿态和位置控制器的设计。
-
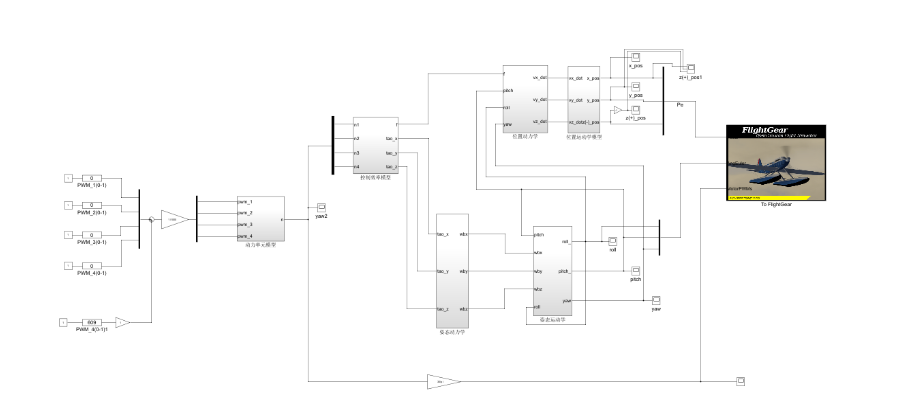
动力单元模型:主要包括四个电机和螺旋桨的动力学行为,通过电机的转速控制推力和转矩。
-
控制效率模型:用于描述推力和转矩与电机控制输入之间的关系。
-
刚体模型:包括无人机的动力学模型和运动学模型,动力学模型主要描述力和加速度之间的关系,运动学模型描述无人机的姿态和位置随时间的变化。
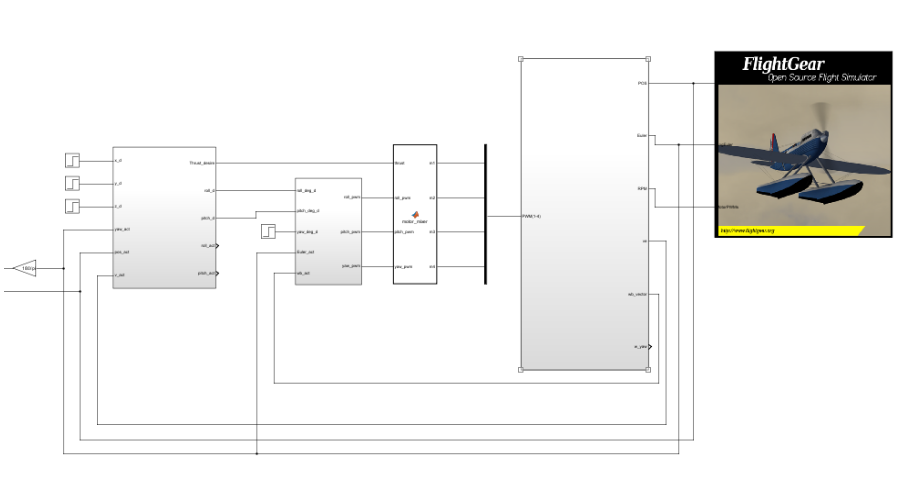
无人机控制器分为姿态控制器和位置控制器两部分。姿态控制是为了保持无人机的平衡,通过控制螺旋桨的速度来调整俯仰角、滚转角和偏航角。位置控制则是在姿态控制的基础上,通过调整无人机的速度和加速度,使其能够在空间中移动到指定的位置。
航点规划:在位置控制的基础上,实现无人机的航点规划,即无人机按照设定的航点序列飞行,依次达到目标点。
实验结果
-
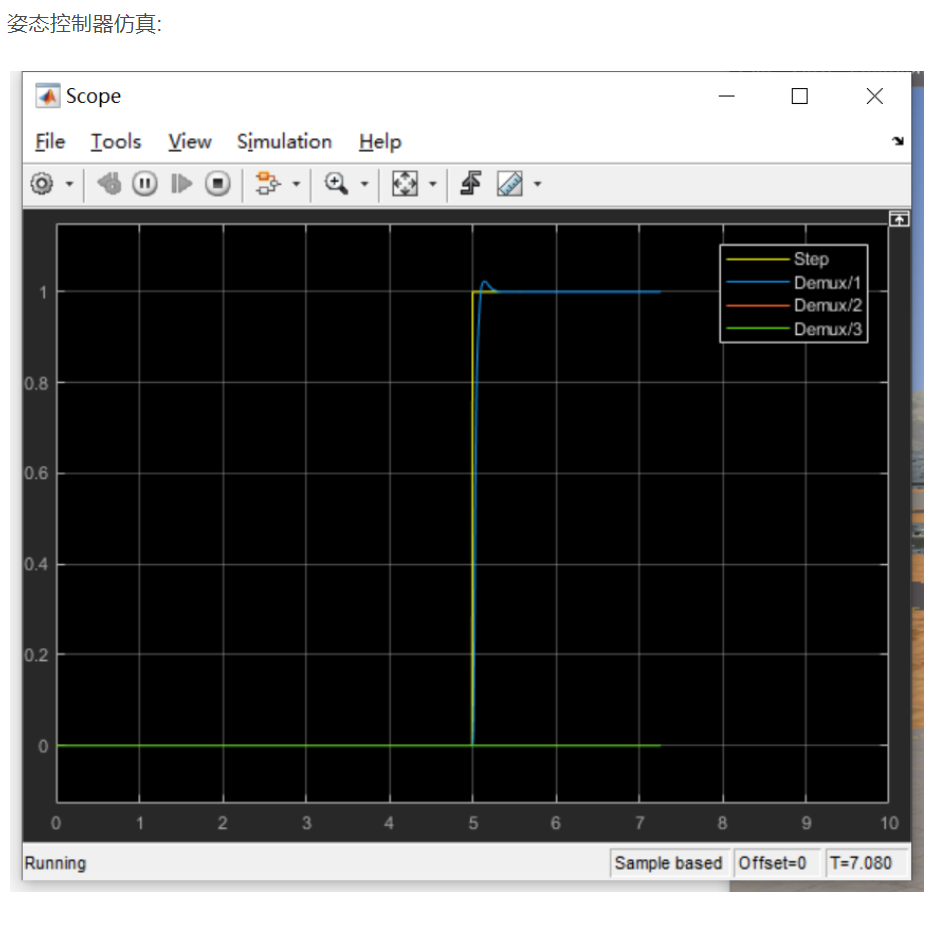
姿态控制仿真:通过设定步进信号验证姿态控制器的性能,结果表明无人机可以迅速达到设定的姿态角度,且姿态控制具有较好的动态响应特性,无超调现象。
-
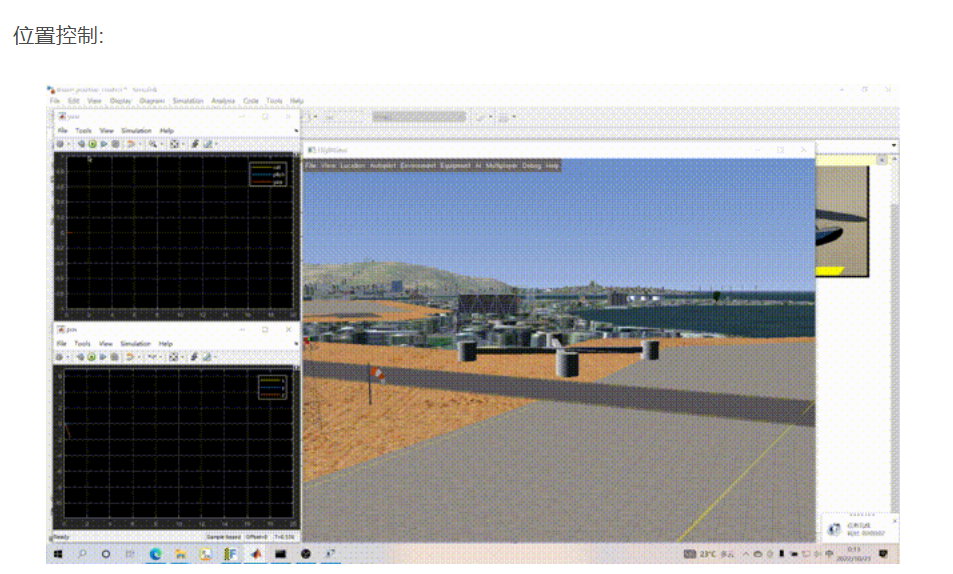
位置控制仿真:位置控制在 Simulink 仿真中表现出较好的稳定性,能够准确跟踪设定的参考轨迹,并在达到目标位置后保持稳定。
-
航点规划实验:通过设定多个航点,无人机可以在仿真中依次到达每个航点,证明航点规划功能实现。
-
实验中的示波器图像显示了姿态角度(俯仰、滚转、偏航)的动态变化过程,验证了控制系统在动态跟踪方面的有效性。
部分代码
以下是一个姿态控制的简化代码示例:
% 四旋翼无人机的姿态控制器仿真代码
clc;
clear all;
close all;% 参数设定
k_p = 1.2; % 比例增益
k_d = 0.8; % 微分增益
desired_pitch = 0; % 期望的俯仰角
desired_roll = 0; % 期望的滚转角
desired_yaw = 0; % 期望的偏航角% 仿真时间
sim_time = 10; % 姿态控制器的 PD 控制
for t = 1:sim_timeerror_pitch = desired_pitch - current_pitch;error_roll = desired_roll - current_roll;error_yaw = desired_yaw - current_yaw;pitch_control = k_p * error_pitch + k_d * (error_pitch - last_error_pitch);roll_control = k_p * error_roll + k_d * (error_roll - last_error_roll);yaw_control = k_p * error_yaw + k_d * (error_yaw - last_error_yaw);last_error_pitch = error_pitch;last_error_roll = error_roll;last_error_yaw = error_yaw;% 更新无人机姿态current_pitch = update_pitch(pitch_control);current_roll = update_roll(roll_control);current_yaw = update_yaw(yaw_control);
end
参考文献
❝
Bouabdallah, S., & Siegwart, R. (2007). Full control of a quadrotor. Proceedings of the 2007 IEEE International Conference on Robotics and Automation.
Mellinger, D., & Kumar, V. (2011). Minimum snap trajectory generation and control for quadrotors. Proceedings of the 2011 IEEE International Conference on Robotics and Automation.
Mahony, R., Kumar, V., & Corke, P. (2012). Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robotics & Automation Magazine.