目录
- 0 专栏介绍
- 1 Bresenham算法介绍
- 2 图解Bresenham算法
- 3 算法流程
- 4 仿真实现
- 4.1 ROS C++实现
- 4.2 Python实现
- 4.3 Matlab实现
0 专栏介绍
🔥课设、毕设、创新竞赛必备!🔥本专栏涉及更高阶的运动规划算法轨迹优化实战,包括:曲线生成、碰撞检测、安全走廊、优化建模(QP、SQP、NMPC、iLQR等)、轨迹优化(梯度法、曲线法等),每个算法都包含代码实现加深理解
🚀详情:运动规划实战进阶:轨迹优化篇
1 Bresenham算法介绍
Bresenham视线生成算法是一种高效的算法,用于在二维网格上绘制直线。它是由Jack Bresenham在1962年提出的,广泛应用于计算机图形学和游戏开发中。该算法的主要优点是只使用整数运算,因此速度较快且易于实现。下面是该算法的动图案例

Bresenham算法可以巧妙地应用在栅格地图中进行一维碰撞检测:首先确定起点和终点,然后使用Bresenham算法绘制从起点到终点的线段,接着检查该路径上每个栅格点是否与障碍物重叠。
2 图解Bresenham算法
Bresenham碰撞测试在三种类型的移动中访问单元格:
- x x x方向移动
- y y y方向移动
- 对角线移动
在栅格地图中,碰撞检测点连线经过若干离散栅格,因此每次移动都将产生非连续误差,Bresenham算法要求下一个移动偏差最小。通过迭代即可访问检测线经过的所有栅格,判断这些栅格的代价是否超过阈值即可完成碰撞检测。
具体地,设需要检测节点 v v v、 w w w间的连线是否经过障碍物,定义缩放误差分别为 δ x = ∣ w . x − v . x ∣ \delta _x=\left| w.x-v.x \right| δx=∣w.x−v.x∣、 δ y = ∣ w . y − v . y ∣ \delta _y=\left| w.y-v.y \right| δy=∣w.y−v.y∣;扩展误差分别为 e x e_x ex、 e y e_y ey;方向增量分别为 Δ x = s g n ( w . x − v . x ) \varDelta x=sgn\left( w.x-v.x \right) Δx=sgn(w.x−v.x)、 Δ y = s g n ( w . y − v . y ) \varDelta y=sgn \left( w.y-v.y \right) Δy=sgn(w.y−v.y)。下面考虑 δ x > δ y \delta _x>\delta _y δx>δy的情形, δ x ⩽ δ y \delta _x\leqslant \delta _y δx⩽δy时可对称导出。
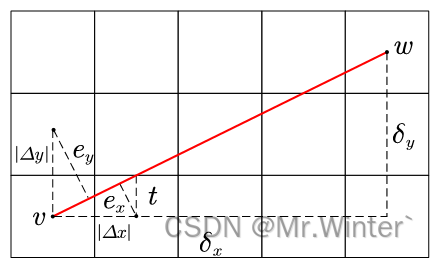
如图所示,根据三角形相似关系可得
{ e y e x = ∣ Δ y ∣ t t δ y = ∣ Δ x ∣ δ x ⇒ e y e x = ∣ Δ y ∣ ∣ Δ x ∣ ⋅ δ x δ y = δ x δ y \begin{cases} \frac{e_y}{e_x}=\frac{\left| \varDelta y \right|}{t}\\ \frac{t}{\delta _y}=\frac{\left| \varDelta x \right|}{\delta _x}\\\end{cases}\Rightarrow \frac{e_y}{e_x}=\frac{\left| \varDelta y \right|}{\left| \varDelta x \right|}\cdot \frac{\delta _x}{\delta _y}=\frac{\delta _x}{\delta _y} {exey=t∣Δy∣δyt=δx∣Δx∣⇒exey=∣Δx∣∣Δy∣⋅δyδx=δyδx
不妨令 e y = δ x e_y=\delta _x ey=δx、 e x = δ y e_x=\delta _y ex=δy,则沿 x x x方向移动将产生负向偏差 δ y \delta _y δy,沿 y y y方向移动将产生正向偏差 δ x \delta _x δx,根据最小化偏差原则选择移动方向
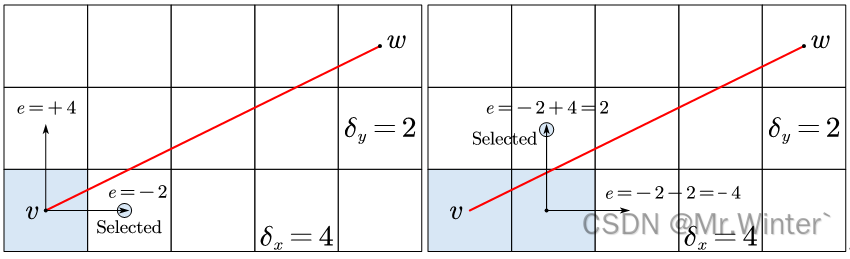
( x , y ) ← { ( x + Δ x , y ) , i f ∣ e + δ x ∣ > ∣ e − δ y ∣ ( x , y + Δ y ) , i f ∣ e + δ x ∣ < ∣ e − δ y ∣ ( x + Δ x , y + Δ y ) , i f ∣ e + δ x ∣ = ∣ e − δ y ∣ \left( x,y \right) \gets \begin{cases} \left( x+\varDelta x,y \right) , \mathrm{if} \left| e+\delta _x \right|>\left| e-\delta _y \right|\\ \left( x,y+\varDelta y \right) , \mathrm{if} \left| e+\delta _x \right|<\left| e-\delta _y \right|\\ \left( x+\varDelta x,y+\varDelta y \right) , \mathrm{if} \left| e+\delta _x \right|=\left| e-\delta _y \right|\\\end{cases} (x,y)←⎩⎪⎨⎪⎧(x+Δx,y),if∣e+δx∣>∣e−δy∣(x,y+Δy),if∣e+δx∣<∣e−δy∣(x+Δx,y+Δy),if∣e+δx∣=∣e−δy∣
下图为Bresenham扩展节点的实例
3 算法流程
算法流程如下所示

4 仿真实现
4.1 ROS C++实现
核心代码如下所示
template <typename Point, typename F_is_obs>
static bool BresenhamCollisionDetection(const Point& pt1, const Point& pt2, F_is_obs func_is_obs)
{int s_x = (pt1.x() - pt2.x() == 0) ? 0 : (pt1.x() - pt2.x()) / std::abs(pt1.x() - pt2.x());int s_y = (pt1.y() - pt2.y() == 0) ? 0 : (pt1.y() - pt2.y()) / std::abs(pt1.y() - pt2.y());int d_x = std::abs(pt1.x() - pt2.x());int d_y = std::abs(pt1.y() - pt2.y());// check if any obstacle exists between pt1 and pt2if (d_x > d_y){int tau = d_y - d_x;int x = pt2.x(), y = pt2.y();int e = 0;while (x != pt1.x()){if (e * 2 > tau){x += s_x;e -= d_y;}else if (e * 2 < tau){y += s_y;e += d_x;}else{x += s_x;y += s_y;e += d_x - d_y;}if (func_is_obs(Point(x, y)))// obstacle detectedreturn true;}}else{// similar. swap x and yint tau = d_x - d_y;int x = pt2.x(), y = pt2.y();int e = 0;while (y != pt1.y()){if (e * 2 > tau){y += s_y;e -= d_x;}else if (e * 2 < tau){x += s_x;e += d_y;}else{x += s_x;y += s_y;e += d_y - d_x;}if (func_is_obs(Point(x, y)))// obstacle detectedreturn true;}}return false;
}
4.2 Python实现
核心代码如下所示
def BresenhamCollisionDetection(self, node1: Node, node2: Node) -> bool:if node1.current in self.obstacles or node2.current in self.obstacles:return Falsex1, y1 = node1.currentx2, y2 = node2.currentif x1 < 0 or x1 >= self.env.x_range or y1 < 0 or y1 >= self.env.y_range:return Falseif x2 < 0 or x2 >= self.env.x_range or y2 < 0 or y2 >= self.env.y_range:return Falsed_x = abs(x2 - x1)d_y = abs(y2 - y1)s_x = 0 if (x2 - x1) == 0 else (x2 - x1) / d_xs_y = 0 if (y2 - y1) == 0 else (y2 - y1) / d_yx, y, e = x1, y1, 0# check if any obstacle exists between node1 and node2if d_x > d_y:tau = (d_y - d_x) / 2while not x == x2:if e > tau:x = x + s_xe = e - d_yelif e < tau:y = y + s_ye = e + d_xelse:x = x + s_xy = y + s_ye = e + d_x - d_yif (x, y) in self.obstacles:return False# swap x and yelse:tau = (d_x - d_y) / 2while not y == y2:if e > tau:y = y + s_ye = e - d_xelif e < tau:x = x + s_xe = e + d_yelse:x = x + s_xy = y + s_ye = e + d_y - d_xif (x, y) in self.obstacles:return Falsereturn True
4.3 Matlab实现
核心代码如下所示
function flag = BresenhamCollisionDetection(map, node1, node2)
% @breif: Judge collision when moving from node1 to node2 using Bresenham.if (map(node1(1), node1(2)) == 2) || (map(node2(1), node2(2)) == 2)flag = true;returnendx1 = node1(1); y1 = node1(2);x2 = node2(1); y2 = node2(2);d_x = abs(x2 - x1);d_y = abs(y2 - y1);if (x2 - x1) == 0s_x = 0;elses_x = (x2 - x1) / d_x;endif (y2 - y1) == 0s_y = 0;elses_y = (y2 - y1) / d_y;endx = x1; y = y1; e = 0;% check if any obstacle exists between node1 and node2if d_x > d_ytao = (d_y - d_x) / 2;while x ~= x2if e > taox = x + s_x;e = e - d_y;elseif e < taoy = y + s_y;e = e + d_x;elsex = x + s_x;y = y + s_y;e = e + d_x - d_y;endif map(x, y) == 2flag = true;return;endend% swap x and yelsetao = (d_x - d_y) / 2;while y ~= y2if e > taoy = y + s_y;e = e - d_x;elseif e < taox = x + s_x;e = e + d_y;elsex = x + s_x;y = y + s_y;e = e + d_y - d_x;endif map(x, y) == 2flag = true;return;endendendflag = false;
end
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …