参考连接
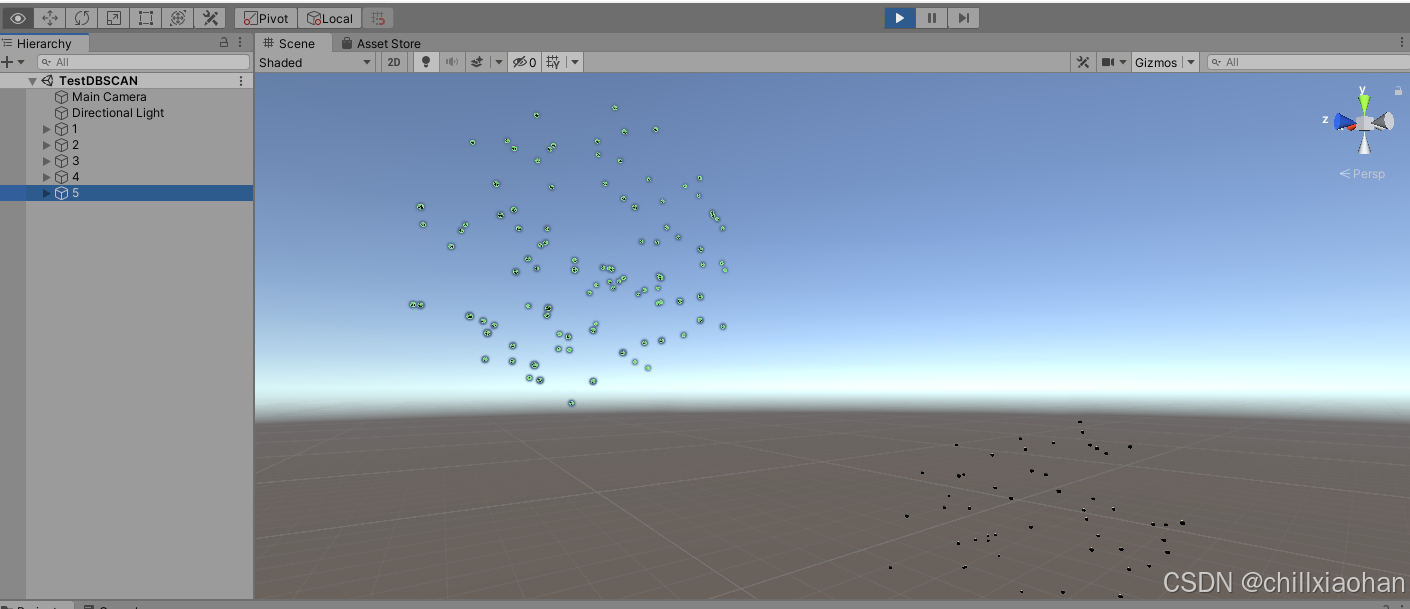
直接上代码,把脚本挂载到场景中的物体上,运行应该就就能看到效果。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;public class TestDBSCAN : MonoBehaviour
{private List<GameObject> goList = new List<GameObject>();private List<Vector3> posList = new List<Vector3>();// Start is called before the first frame updatevoid Start(){//创建随机点for (int j = 0; j < 5; j++){for (int i = 0; i < 100; i++){GameObject go = GameObject.CreatePrimitive(PrimitiveType.Sphere);go.transform.localScale = Vector3.one * 0.1f;go.transform.position = Random.insideUnitSphere * 5;go.transform.position += Vector3.one * j * 10;goList.Add(go);posList.Add(go.transform.position);}}//执行算法int[] result = DBSCAN.Cluster(posList, 3, 4);Dictionary<int, List<GameObject>> dic = new Dictionary<int, List<GameObject>>();//将算法结果分组for (int i = 0; i < result.Length; i++){int key = result[i];if (dic.ContainsKey(key)){dic[key].Add(goList[i]);}else{List<GameObject> tempList = new List<GameObject>();tempList.Add(goList[i]);dic.Add(key, tempList);}}//对GameObject进行分组foreach (var item in dic){GameObject goParent = new GameObject();goParent.name = item.Key.ToString();foreach (var item2 in item.Value){item2.transform.SetParent(goParent.transform);}}}}public class DBSCAN
{/// <summary>/// /// </summary>/// <param name="points">点的集合</param>/// <param name="minPts">最小个数</param>/// <param name="eps">最小半径</param>/// <returns></returns>public static int[] Cluster(List<Vector3> points, int minPts, int eps){int n = points.Count;int[] labels = new int[n];int clusterId = 0;// 初始化所有点的标签为-1,表示未分类for (int i = 0; i < n; i++){labels[i] = -1;}// 遍历所有点for (int i = 0; i < n; i++){Vector3 p = points[i];// 如果点已经分类,则跳过if (labels[i] != -1){continue;}// 找到p的邻居点List<Vector3> neighbors = GetNeighbors(points, p, eps);// 如果邻居点数量小于minPts,则将p标记为噪声点if (neighbors.Count < minPts){labels[i] = 0;continue;}// 新建一个簇clusterId++;labels[i] = clusterId;// 扩展簇ExpandCluster(points, labels, neighbors, clusterId, eps, minPts);}return labels;}public static void ExpandCluster(List<Vector3> points, int[] labels, List<Vector3> neighbors, int clusterId, int eps, int minPts){// 遍历邻居点for (int i = 0; i < neighbors.Count; i++){Vector3 q = neighbors[i];int index = points.IndexOf(q);// 如果邻居点未分类,则将其加入簇中if (labels[index] == -1){labels[index] = clusterId;// 找到q的邻居点List<Vector3> qNeighbors = GetNeighbors(points, q, eps);// 如果邻居点数量大于等于minPts,则将其加入扩展簇的邻居点列表中if (qNeighbors.Count >= minPts){neighbors.AddRange(qNeighbors);}}// 如果邻居点已经被分类为噪声点,则将其重新分类到当前簇中else if (labels[index] == 0){labels[index] = clusterId;}}}private static List<Vector3> GetNeighbors(List<Vector3> list, Vector3 corePoint, float radius){List<Vector3> result = new List<Vector3>();foreach (var p in list){if (Vector3.Distance(corePoint, p) <= radius)result.Add(p);}return result;}
}