对角双差速轮AGV平移、直行、转弯、原地旋转案例
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/458243.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
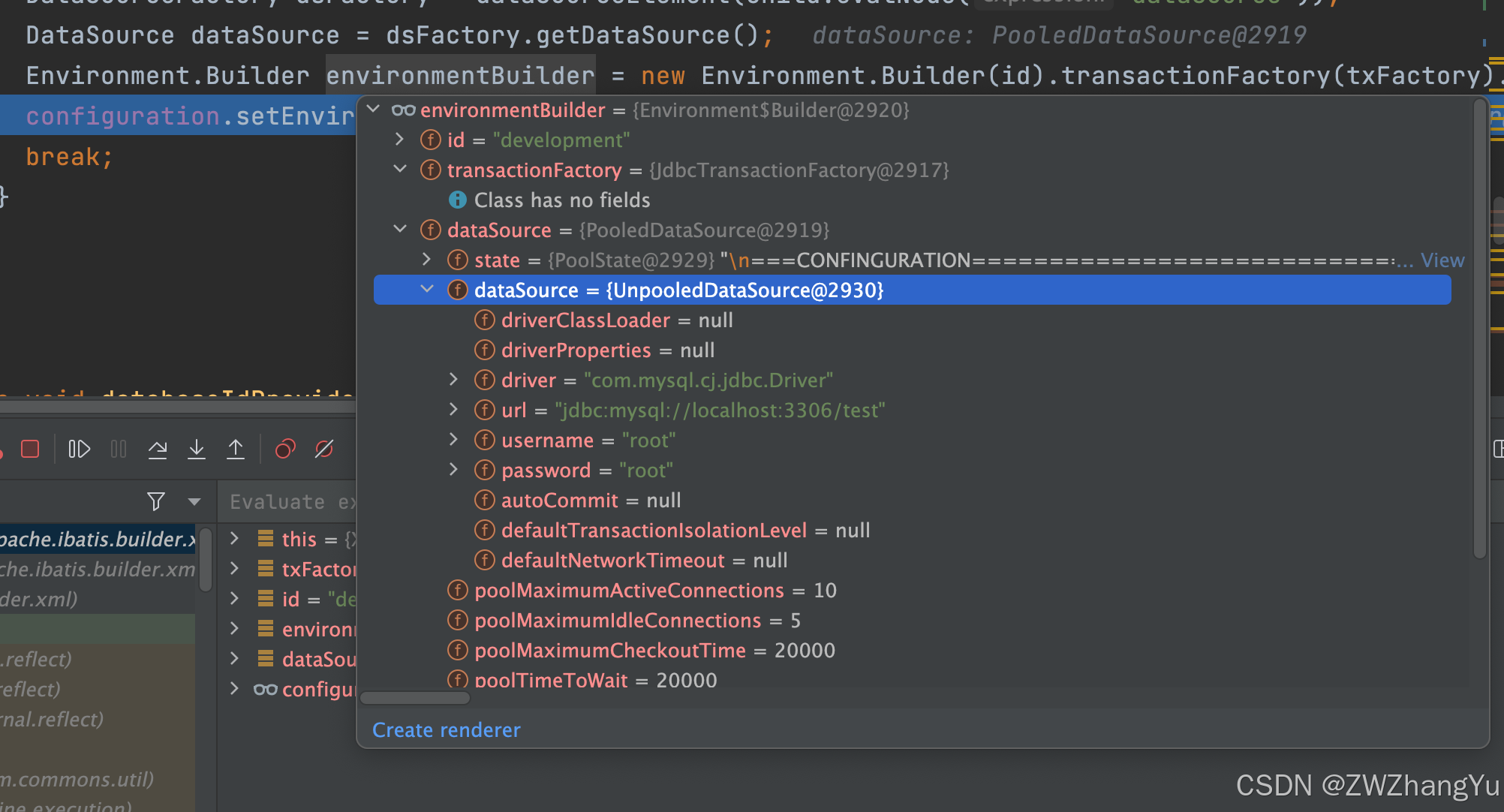
【MyBatis源码】SqlSessionFactoryBuilder源码分析
文章目录 概述类结构从 InputStream 创建 SqlSessionFactoryXMLConfigBuilder构建ConfigurationXMLConfigBuilder初始化方法parse()方法parseConfiguration属性(properties) 概述
SqlSessionFactory 是 MyBatis 的核心接口之一,提供创建 Sql…

vue通过JSON文件生成WPML文件源码
可以使用封装的json解析器进行JSON数据获取,读取点的经度、维度、高程等数据,再使用对应的WPML文件生成函数使用该源码下载WPML文件(固定WPML生成:js模板式生成大疆上云wpml文件(含详细注释,已封装成函数&a…

(7) cuda异常处理
文章目录 上节概要异常处理代码 上节概要
上一节 block_width 64的时候,64644096 > 1024(一个block里面最多只能有1024个线程,所以这里计算会有问题)
异常处理 __FILE__: 编译器内部定义的一个宏。表示的是当前文件的文件…

【C++单调栈 贡献法】907. 子数组的最小值之和|1975
本文涉及的基础知识点
C单调栈
LeetCode907. 子数组的最小值之和
给定一个整数数组 arr,找到 min(b) 的总和,其中 b 的范围为 arr 的每个(连续)子数组。 由于答案可能很大,因此 返回答案模 109 7 。 示例 1&#x…
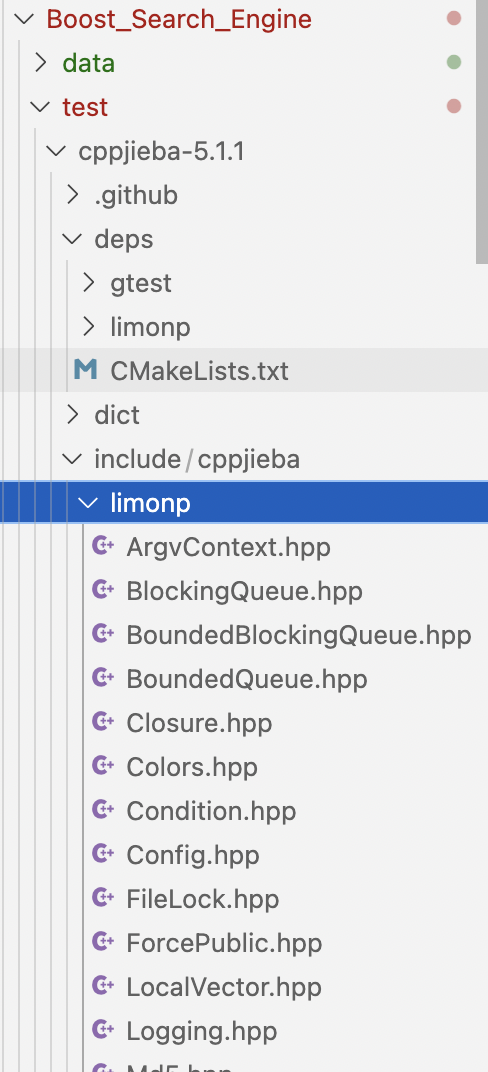
项目:Boost 搜索引擎
项目:Boost 搜索引擎
1、项目背景 公司:百度、360、搜狗、谷歌 …站内搜索:搜索的数据更垂直(相关),数据量小 2、整体框架 3、技术栈和项目环境 技术栈:C/C C11,STL,jso…

error Unexpected mutation of “xxxxx“ prop
错误是在进行 eslint 检查的时候触发的,这个错误的原因是我们在子组件中改变了父组件传递过来的 props 解决方法一:
不改变父组件传递过来的 props,如果需要改变父组件传递过来的值,可以使用 defineModel() 进行接收值ÿ…

【零售和消费品&软件包】快递包装类型检测系统源码&数据集全套:改进yolo11-HSPAN
改进yolo11-EfficientHead等200全套创新点大全:快递包装类型检测系统源码&数据集全套
1.图片效果展示 项目来源 人工智能促进会 2024.10.24
注意:由于项目一直在更新迭代,上面“1.图片效果展示”和“2.视频效果展示”展示的系统…

STM32第15章 RCC-使用HSE/HSI配置时钟
时间:2024.10.21-10.23
参考资料:
《零死角玩转STM32》“RCC-使用HSE/HIS配置时钟”章节
TIPS:
从前面的历程中我们知道,程序在启动的时候会执行汇编文件,汇编文件里会调用System_Init(固件库编程的函数),它里面会把时钟初始化成72M,因此前面我们在用固件库写程序的…


MSR寄存器独有的还是共享的
英特尔白皮书Volume 4: Model-Specific Registers 这一章列出了不同英特尔处理器系列的 MSR(模型特定寄存器)。所有列出的 MSR 都可以使用 RDMSR 和 WRMSR 指令进行读取和写入。MSR 的作用域定义了访问相同 MSR 的处理器集合,具体如下&#x…


温泉押金原路退回系统, 押金+手牌+电子押金单——未来之窗行业应用跨平台架构
一、温泉手牌收押金必要性
1. 防止手牌丢失:手牌是顾客在温泉内存储个人物品和进出更衣室的重要凭证。收押金可以让顾客更加重视手牌,降低丢失的概率。比如说,有的顾客可能会因为粗心大意随手放置手牌,如果没有押金的约束&…

STM32之外部中断(实验对射式传感器计次实验)
外部中断配置
#include "stm32f10x.h" // Device headeruint16_t CountSensor_Count;void CountSensor_Init(void)
{//RCC--> GPIO--> AFIO--> EXTI--> NVIC五步RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB时…

图---java---黑马
图
概念
图是由顶点(vertex)和边(edge)组成的数据结构,例如
该图有四个顶点:A,B,C,D以及四条有向边,有向图中,边是单向的。
有向 vs 无向
如果是无向图,那么边是双向的&#x…

aarch64-opencv341交叉编译,并在arm上部署helloopencv
背景
当需要在jetson xavier nx或者rk 3562等平台上开发关于视觉检测的工程时,由于arm板子资源不足或者不能联网等原因,通常在虚拟机上利用交叉编译器编译得到可执行程序,然后部署到arm板上。
aarch64-opencv341交叉编译
ubuntu虚拟机中先…

【Linux】环境下升级redis
一、摘要
最近漏洞扫描服务器发现,Redis 缓冲区溢出漏洞(CVE-2024-31449),解决办法redis更新到6.2.16、7.2.6或7.4.1及以上版本。
二、漏洞描述
漏洞描述:经过身份验证的用户可能会使用特制的 Lua 脚本来触发位库中的堆栈缓冲区溢出&#…

Kaggle比赛复盘
Kaggle - LLM Prompt Recovery 解决方案报告
比赛背景/目标
大型语言模型(Large Language Models,LLMs)通常被用于改写或对文本进行风格修改。本次Kaggle竞赛的目标是根据给定的改写文本,还原用于将原始文本转换为改写文本的LLM…
MetaArena推出《Final Glory》:引领Web3游戏技术新风向
随着区块链技术的日益成熟,Web3游戏成为了游戏产业探索的新方向,将去中心化经济与虚拟世界结合在一起,形成了一个全新的生态体系。然而,尽管Web3游戏展示了令人兴奋的可能性,但其背后的技术障碍依旧严峻,特…

Android Activity SingleTop启动模式使用场景
通知栏 当用户点击通知栏中的通知时,可以使用单顶启动模式来打开对应的活动,并确保只有一个实例存在。 简单集成极光推送
创建应用 获取appkey参数 切换到极光工作台 极光sdk集成
Project 根目录的主 gradle 配置 Module 的 gradle 配置 Jpush依赖配置 配置推送必须…

华为原生鸿蒙操作系统:我国移动操作系统的新篇章
华为原生鸿蒙操作系统:我国移动操作系统的新篇章 引言
在移动操作系统领域,苹果iOS和安卓系统一直占据主导地位。然而,随着华为原生鸿蒙操作系统的正式发布,这一格局正在发生深刻变化。作为继苹果iOS和安卓系统后的全球第三大移动…