【1】引言
前序学习了5种阈值处理方法,包括(反)阈值处理、(反)零值处理和截断处理,还学习了一种自适应处理方法,相关文章链接为:
python学opencv|读取图像(三十三)阈值处理-灰度图像-CSDN博客
python学opencv|读取图像(三十四)阈值处理-彩色图像-CSDN博客
python学opencv|读取图像(三十五)反阈值处理-CSDN博客
python学opencv|读取图像(三十六)(反)零值处理-CSDN博客
python学opencv|读取图像(三十七 )截断处理-CSDN博客
python学opencv|读取图像(三十八 )阈值自适应处理-CSDN博客
在上述所有文章中,阈值开关都是自己随机设置的,因此,实际效果可能未必是最佳。
如果有一种方法,可以让函数自动选取最佳阈值开关,那就能时刻获得最佳的阈值处理效果,这个方法就是:“阈值处理参数+Otsu”。
【2】官网教程
Otsu方法的说明,点击下方链接可以直达:
OpenCV: Miscellaneous Image Transformations
官网页面关于Otsu方法的说明为:

图1
实际上,使用Otsu方法时,必须配合前述5种阈值处理方法一起进行阈值调整。因为Otsu方法本身是来辅助选择最优的阈值开关,所以阈值处理方法还需要保留。
在下述官网示例说明中,我们会看到这一解释:
import cv2 as cv # 引入CV模块
import numpy as np #引入numpy模块# 读取图片-直接转化灰度图
src = cv.imread('srcf.png',0) #读取图像
dst=src#输出图像# 读取图片-函数转化灰度图
src1 = cv.imread('srcf.png') #读取图像
dst1=cv.cvtColor(src1,cv.COLOR_BGR2GRAY) #转化为灰度图dstt=np.hstack((dst,dst1)) #两种灰度图拼接在一起OpenCV: Image Thresholding

图2
【3】代码测试
首先引入必要的模块和原图像:
import cv2 as cv # 引入CV模块
import numpy as np #引入numpy模块# 读取图片-直接转化灰度图
src = cv.imread('srcf.png',0) #读取图像
dst=src#输出图像# 读取图片-函数转化灰度图
src1 = cv.imread('srcf.png') #读取图像
dst1=cv.cvtColor(src1,cv.COLOR_BGR2GRAY) #转化为灰度图dstt=np.hstack((dst,dst1)) #两种灰度图拼接在一起然后进行Otsu处理,为进行对比,也做了零值处理:
#阈值处理
t2,dst2=cv.threshold(src,58,158,cv.THRESH_TOZERO) #零值-阈值开关58,阈值上限158
t3,dst3=cv.threshold(src,0,255,cv.THRESH_TOZERO+cv.THRESH_OTSU) #零值+OTSU
dsto=np.hstack((dst2,dst3)) #两种阈值处理图拼接在一起之后显示图像和保存图像:
# 在屏幕展示效果
cv.imshow('srcdstt', dstt) # 在屏幕展示效果
cv.imshow('srcdsto', dsto) # 在屏幕展示效果#显示BGR值
print("dst1像素数为[100,100]位置处的BGR=", dst1[100, 100]) # 获取像素数为[100,100]位置处的BGR
print("dst2像素数为[100,100]位置处的BGR=", dst2[100, 100]) # 获取像素数为[100,100]位置处的BGR
print("dst3像素数为[100,100]位置处的BGR=", dst3[100, 100]) # 获取像素数为[100,100]位置处的BGR#保存图像
cv.imwrite('srcf-dstt.png', dstt) # 保存图像
cv.imwrite('srcf-dst2.png', dst3) # 保存图像
cv.imwrite('srcf-dsto.png', dsto) # 保存图像cv.waitKey() # 图像不会自动关闭
cv.destroyAllWindows() # 释放所有窗口此处使用的原始图像为:

图3
转化后的灰度图为:

图4 灰度图
进行单纯零值处理和零值处理+OTSU处理后的图像为:

图5 单纯零值处理和零值处理+OTSU处理
由图5可见,右侧为零值处理+OTSU处理后的图像,更趋向于突出轮廓边线。
由于OTSU处理图像会自动选择最佳阈值开关,所以我们输出了特定位置的BGR值:

图6 特定像素点BGR值
dst1为转后的原始灰度图,dst2为单纯零值处理图,dst3为零值处理+OTSU处理后的图像。
由图6可见,零值处理+OTSU处理后的图像,自动选择的阈值开关也没有超过156,所以这两个图在像素点[100][100]处的BGR值完全相等。
【4】细节说明
使用Otsu方法的时候,依然调用cv2.threshold()函数,虽然此时Otsu会自动选择阈值开关,但仍然需要在阈值开关的位置写"0"。
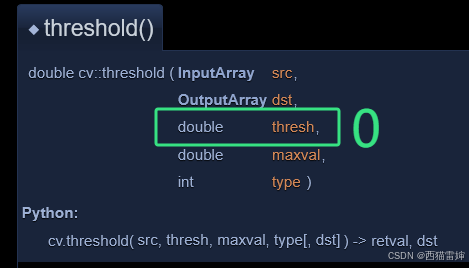
图7 提前设定阈值开关为0
【5】总结
掌握了python+opencv实现Otsu自动调整阈值开关的操作技巧。