注:英文引文机翻,未校。
中文引文未整理去重,如有异常,请看原文。
Euler’s Formula and Fourier Transform
Posted byczxttkl October 7, 2018
Euler’s formula states that e i x = cos x + i sin x e^{ix} =\cos{x}+ i \sin{x} eix=cosx+isinx. When l a t e x x = π latex x = \pi latexx=π, the formula becomes e π = − 1 e^{\pi} = -1 eπ=−1 known as Euler’s identity.
欧拉公式表明 e i x = cos x + i sin x e^{ix} = \cos{x} + i \sin{x} eix=cosx+isinx。当 x = π x = \pi x=π 时,公式变为 e π = − 1 e^{\pi} = -1 eπ=−1,称为欧拉恒等式。
An easy derivation of Euler’s formula is given in 3 3 3 and 5 5 5. According to Maclaurin series (a special case of taylor expansion f ( x ) = f ( a ) + f ′ ( a ) ( x − a ) + f ” ( a ) 2 ! ( x − a ) 2 + ⋯ f(x)=f(a)+f'(a)(x-a)+\frac{f”(a)}{2!}(x-a)^2+\cdots f(x)=f(a)+f′(a)(x−a)+2!f”(a)(x−a)2+⋯ when a = 0 a=0 a=0),
一个简单的欧拉公式推导见于 3 3 3 和 5 5 5。根据麦克劳林级数(泰勒展开的一个特例 f ( x ) = f ( a ) + f ′ ( a ) ( x − a ) + f ′ ′ ( a ) 2 ! ( x − a ) 2 + ⋯ f(x) = f(a) + f'(a)(x-a) + \frac{f''(a)}{2!}(x-a)^2 + \cdots f(x)=f(a)+f′(a)(x−a)+2!f′′(a)(x−a)2+⋯ 当 a = 0 a = 0 a=0 时),
e x = 1 + x + x 2 2 ! + x 3 3 ! + x 4 4 ! + ⋯ = 2 e^x=1+x+\frac{x^2}{2!}+\frac{x^3}{3!}+\frac{x^4}{4!}+\cdots =2 ex=1+x+2!x2+3!x3+4!x4+⋯=2
Therefore, replacing x x x with i x ix ix, we have
因此,将 x x x 替换为 i x ix ix,我们得到
e i x = 1 + i x − x 2 2 ! − x 3 3 ! + x 4 4 ! + x 5 5 ! − ⋯ = 2 e^{ix}=1+ix-\frac{x^2}{2!}-\frac{x^3}{3!}+\frac{x^4}{4!}+\frac{x^5}{5!}-\cdots =2 eix=1+ix−2!x2−3!x3+4!x4+5!x5−⋯=2
By Maclaurin series, we also have
根据麦克劳林级数,我们还有
cos x = 1 − x 2 2 ! + x 4 4 ! − x 6 6 ! + ⋯ sin x = x − x 3 3 ! + x 5 5 ! − ⋯ = 2 \cos{x}=1-\frac{x^2}{2!}+\frac{x^4}{4!}-\frac{x^6}{6!} + \cdots \newline \sin{x}=x -\frac{x^3}{3!}+\frac{x^5}{5!}-\cdots =2 cosx=1−2!x2+4!x4−6!x6+⋯sinx=x−3!x3+5!x5−⋯=2
Therefore, we can rewrite e i x e^{ix} eix as e i x = cos x + i sin x e^{ix}=\cos{x}+i\sin{x} eix=cosx+isinx
因此,我们可以将 e i x e^{ix} eix 重写为 e i x = cos x + i sin x e^{ix} = \cos{x} + i \sin{x} eix=cosx+isinx。
Intuitive understanding of e i x = cos x + i sin x e^{ix}=\cos{x}+i\sin{x} eix=cosx+isinx is illustrated in 1 1 1 together with its own video 4 4 4, as well as in 3Blue1Brown’s two videos 6 6 6 7 7 7.
e i x = cos x + i sin x e^{ix} = \cos{x} + i \sin{x} eix=cosx+isinx 的直观理解在 1 1 1 中有说明,连同其自己的视频 4 4 4,以及在 3Blue1Brown 的两个视频 6 6 6 7 7 7 中。
First, from a conventional view of coordinate system, e i x = cos x + i sin x e^{ix}=\cos{x}+i\sin{x} eix=cosx+isinx means a point with x coordinate cos x \cos{x} cosx and y coordinate sin x \sin{x} sinx on a unit circle (centered at the origin with radius 1) in the complex plane.
首先,从常规的坐标系视角来看, e i x = cos x + i sin x e^{ix} = \cos{x} + i \sin{x} eix=cosx+isinx 表示复平面上单位圆(以原点为中心,半径为1)上的一个点,其 x 坐标为 cos x \cos{x} cosx,y 坐标为 sin x \sin{x} sinx。
Another view is that e i x e^{ix} eix describes the point that moves distance x x x from (1,0) along the circumference of the unit circle.
另一种观点是 e i x e^{ix} eix 描述了一个点,它从 (1,0) 沿单位圆周移动距离 x x x。
The last view, which is similar to the second view, is that e i x e^{ix} eix specifies the point such that the degree between the x axis and the line connects that point to the origin is radiant x.
最后一个观点与第二个观点类似, e i x e^{ix} eix 指定了一个点,使得x轴与连接该点到原点的线之间的夹角是 x x x 弧度。
For example, e i ⋅ 1 e^{i \cdot 1} ei⋅1 viewed in x&y coordinates:
例如, e i ⋅ 1 e^{i \cdot 1} ei⋅1 在 x&y 坐标中查看:

or viewed from the moving perspective:
或从移动的视角查看:

or viewed from the radiant perspective:
或从辐射的视角查看:

As pointed out by 1 1 1, we can think of normal exponential as stretching an axis such that number 1 is stretched to a point denoting the exponential result. For example, 2 3 2^3 23 means 1 is stretched to 8, or 1 is stretched to 2 first, then that point is stretched to 4, then finally that point is stretched to 8. However, complex exponential e i x e^{ix} eix means to rotate from the point (1,0) at a constant rotation speed x x x. Therefore, Euler’s identity can be interpreted as starting from point (1,0), a point moves half of the circle (radiant π \pi π) and ends up at (-1, 0), therefore e π = − 1 e^{\pi}=-1 eπ=−1. A good diagram summarizing this intuition is as below:
正如 1 1 1 所指出的,我们可以将普通的指数视为拉伸一个轴,使得数字1被拉伸到表示指数结果的点。例如, 2 3 2^3 23 意味着1被拉伸到8,或者1先被拉伸到2,然后那个点被拉伸到4,最后那个点被拉伸到8。然而,复数指数 e i x e^{ix} eix 意味着从点 (1,0) 开始以 恒定 的旋转速度 x x x 旋转。因此,欧拉恒等式可以被解释为从点 (1,0) 开始,一个点移动了半个圆( π \pi π 弧度)并最终到达 (-1, 0),因此 e π = − 1 e^{\pi} = -1 eπ=−1。一个很好地总结这种直观理解的示意图如下:

Why understanding Euler’s formula as a point rotating on a unit circle helps? One example in which Euler’s formula is useful is Fourier transform. The goal of Fourier transform is to turning signals measured in time space into analyzable, frequency-based spectrum. Fourier transform is intuitively illustrated in BetterExplained $8, 3Blue1Brown’s 9 9 9, and Math StackExchange 16 16 16. Below is notes taken based on 9 9 9.
为什么理解欧拉公式作为单位圆上的一个旋转点是有帮助的?欧拉公式有用的一个例子是傅里叶变换。傅里叶变换的目标是将时间空间中测量的信号转换成可分析的、基于频率的频谱。傅里叶变换在 BetterExplained $8, 3Blue1Brown’s 9 9 9 和 Math StackExchange 16 16 16 中直观地说明了。以下是根据 9 9 9 记录的笔记。
A concrete example to apply Fourier transform is to analyze a signal which mixes two different signals, each of a constant frequency. In the example, suppose we can only measure the blended signal (green), while we want to tell posthumously that it actually composes of the pink signal (for example, 2Hz) and the yellow signal (for example, 3Hz).
应用傅里叶变换的一个具体例子是分析混合了两个不同信号的信号,每个信号都有恒定的频率。在例子中,假设我们只能测量混合信号(绿色),而我们想要事后说明它实际上由粉色信号(例如,2Hz)和黄色信号(例如,3Hz)组成。

The magic idea of Fourier transform is that if you transform the signal measured in the Pressure vs. Time space into a rotating motion in a 2D plane, it will looks like the diagram below:
傅里叶变换的神奇之处在于,如果你将压力与时间空间中测量的信号转换成二维平面中的旋转运动,它将看起来像下面的图表:

Depending on the frequency of rotating motion, the diagram on the 2D plane may be different.
根据旋转运动的频率,二维平面上的图表可能会有所不同。

An important observation is that if you look at the center of mass of the diagram based on any rotating frequency, you will see that the center of mass is farthest away from the origin when the frequency of rotating motion matches the frequency of either individual signal (2Hz or 3Hz).
一个重要的观察是,如果你查看基于任何旋转频率的图表的质心,你会看到当旋转运动的频率与任一单独信号的频率(2Hz或3Hz)匹配时,质心距离原点最远。

Therefore, to recover original signals, we need to try out every possible frequency of rotating motion and just obtain the location of the center of mass of the diagram for each frequency of rotating motion, then we would know what are the frequencies of the original individual signals.
因此,为了恢复原始信号,我们需要尝试每一种可能的旋转运动频率,并仅获得每种旋转运动频率的图表质心的位置,然后我们就会知道原始单独信号的频率是什么。
The center of mass can be obtained by sampling and averaging of the data points on the diagram, while the diagram is mapped onto a 2D complex plane:
质心可以通过对图表上的数据点进行采样和平均来获得,而图表被映射到二维复平面上:

When the number of samples goes to infinite, it becomes integral.
当样本数量趋向于无穷大时,它就变成了积分。

Fourier transform, following this idea, is only different in that the integral is from negative infinity to positive infinity, and there is no final average over time ( 1 t 2 − t 1 \frac{1}{t_2-t_1} t2−t11 removed).
傅里叶变换,遵循这个想法,唯一的不同在于积分是从负无穷到正无穷,并且没有最终的时间平均( 1 t 2 − t 1 \frac{1}{t_2-t_1} t2−t11 被移除)。

Here is an example 15 15 15 where Fourier transform is applied on f ( t ) = cos ( 2 π s t ) f(t)=\cos(2\pi st) f(t)=cos(2πst). The result is two Dirac Delta functions on the frequency domain.
这里有一个例子 15 15 15,傅里叶变换应用于 f ( t ) = cos ( 2 π s t ) f(t) = \cos(2\pi st) f(t)=cos(2πst)。结果是频率域上的两个狄拉克δ函数。

The transform process is based on trigonometry. In the second to the last equation, when u = ± s u = \pm s u=±s,
变换过程基于三角学。在倒数第二个方程中,当 u = ± s u = \pm s u=±s 时,
∫ − ∞ ∞ cos ( 2 π s t ) cos ( 2 π u t ) d t = ∫ − ∞ ∞ cos 2 ( 2 π s t ) d t = ∫ − ∞ ∞ 1 2 d t + 1 2 ∫ − ∞ ∞ cos ( 4 π s t ) d t = 1 2 ⋅ ∞ + 1 2 ∫ − ∞ ∞ cos ( 4 π s t ) d t ( s = 2 ) \begin{align*} \int_{-\infty}^{\infty} \cos(2\pi st) \cos(2\pi ut) dt &=\int_{-\infty}^{\infty} \cos^2(2\pi st) dt\\ &= \int_{-\infty}^{\infty} \frac{1}{2} dt + \frac{1}{2} \int_{-\infty}^{\infty} \cos(4\pi st) dt\\ &= \frac{1}{2} \cdot \infty + \frac{1}{2} \int_{-\infty}^{\infty} \cos(4\pi st) dt \quad (s = 2) \end{align*} ∫−∞∞cos(2πst)cos(2πut)dt=∫−∞∞cos2(2πst)dt=∫−∞∞21dt+21∫−∞∞cos(4πst)dt=21⋅∞+21∫−∞∞cos(4πst)dt(s=2)
According to [10], although ∫ − ∞ ∞ cos ( 4 π s t ) d t ( s = 2 ) \int_{-\infty}^{\infty} \cos(4\pi st) dt \quad (s = 2) ∫−∞∞cos(4πst)dt(s=2) does not converge, I have seen many places [15, 18] treating ∫ − ∞ ∞ cos ( 4 π s t ) d t = 0 ( s = 2 ) \int_{-\infty}^{\infty}\cos(4\pi st) dt = 0 \quad (s = 2) ∫−∞∞cos(4πst)dt=0(s=2). I don’t understand this, but I could think it in an intuitive way: although ∫ − ∞ ∞ cos ( 4 π s t ) d t ( s = 2 ) \int_{-\infty}^{\infty}\cos(4\pi st) dt \quad (s = 2) ∫−∞∞cos(4πst)dt(s=2) does not converge, its values is confined in a limited range ( ≤ 2 \leq 2 ≤2). Compared to the infinity we obtain from ∫ − ∞ ∞ 1 2 d t ( s = 2 ) \int_{-\infty}^{\infty} \frac{1}{2} dt \quad (s = 2) ∫−∞∞21dt(s=2), the value of ∫ − ∞ ∞ cos ( 4 π s t ) d t ( s = 2 ) \int_{-\infty}^{\infty}\cos(4\pi st) dt \quad (s = 2) ∫−∞∞cos(4πst)dt(s=2) is infinitely close to zero.
根据 [10],尽管 ∫ − ∞ ∞ cos ( 4 π s t ) d t ( s = 2 ) \int_{-\infty}^{\infty} \cos(4\pi st) dt \quad (s = 2) ∫−∞∞cos(4πst)dt(s=2) 不收敛,但我在很多地方 [15, 18] 看到将 ∫ − ∞ ∞ cos ( 4 π s t ) d t = 0 ( s = 2 ) \int_{-\infty}^{\infty}\cos(4\pi st) dt = 0 \quad (s = 2) ∫−∞∞cos(4πst)dt=0(s=2) 来处理的情况。我不理解这一点,但我可以用一种直观的方式来思考:尽管 ∫ − ∞ ∞ cos ( 4 π s t ) d t ( s = 2 ) \int_{-\infty}^{\infty}\cos(4\pi st) dt \quad (s = 2) ∫−∞∞cos(4πst)dt(s=2) 不收敛,但其值被限制在一个有限的范围内( ≤ 2 \leq 2 ≤2 )。与我们从 ∫ − ∞ ∞ 1 2 d t ( s = 2 ) \int_{-\infty}^{\infty} \frac{1}{2} dt \quad (s = 2) ∫−∞∞21dt(s=2) 得到的无穷大相比, ∫ − ∞ ∞ cos ( 4 π s t ) d t ( s = 2 ) \int_{-\infty}^{\infty}\cos(4\pi st) dt \quad (s = 2) ∫−∞∞cos(4πst)dt(s=2) 的值无限接近于零。
Another idea is to solve the integration based on Euler’s formula [17]$20]. Based on Euler’s formula, we can get cos ( x ) = 1 2 ( e i x + e − i x ) ( s = 2 ) \cos(x)=\frac{1}{2}(e^{ix} + e^{-ix}) \quad (s = 2) cos(x)=21(eix+e−ix)(s=2). Also, Dirac Delta function is defined as (its proof, which I don’t fully understand, can be found on [11, 12, 13]):
另一个思路是基于欧拉公式 [17]$20] 来求解积分。基于欧拉公式,我们可以得到 cos ( x ) = 1 2 ( e i x + e − i x ) ( s = 2 ) \cos(x)=\frac{1}{2}(e^{ix} + e^{-ix}) \quad (s = 2) cos(x)=21(eix+e−ix)(s=2) 。此外,狄拉克δ函数定义如下(其证明我不完全理解,可以在 [11, 12, 13] 中找到):
δ ( x ) = 1 2 π ∫ − ∞ ∞ e − j x t d t ( s = 2 ) \delta(x)= \frac{1}{2\pi} \int_{-\infty}^{\infty} e^{-jxt}dt \quad (s = 2) δ(x)=2π1∫−∞∞e−jxtdt(s=2)
Or equivalently,
或者等价地,
δ ( x ) = ∫ − ∞ ∞ e − j 2 π x t d t ( s = 2 ) \delta(x) =\int_{-\infty}^{\infty} e^{-j2\pi xt}dt \quad (s = 2) δ(x)=∫−∞∞e−j2πxtdt(s=2)
Therefore, we can finally get (based on [17][20], with a little difference because they transform cos ( ω 0 t ) \cos(\omega_0 t) cos(ω0t) rather than cos ( 2 π s t ) \cos(2\pi st) cos(2πst)):
因此,我们最终可以得到(基于 [17][20],有一点不同,因为他们变换的是 cos ( ω 0 t ) \cos(\omega_0 t) cos(ω0t) 而不是 cos ( 2 π s t ) \cos(2\pi st) cos(2πst)):

According to the linear property of Fourier transform 19 19 19, if a blended signal is the sum of several signals (for example, cos ( 2 π s t ) + cos ( 3 π s t ) \cos(2\pi st)+\cos (3\pi st) cos(2πst)+cos(3πst), then the resultant Fourier transform is the sum of several Dirac functions. That’s how Fourier transform extracts individual signals from the mixed one! And the connection between Euler’s formula and Fourier transform is that the integration required by Fourier transform to obtain the center of mass of the rotation diagram, if connected to Euler’s formula, can be calculated very easily.
根据傅里叶变换的线性性质 19 19 19,如果混合信号是几个信号的总和(例如, cos ( 2 π s t ) + cos ( 3 π s t ) \cos(2\pi st) + \cos(3\pi st) cos(2πst)+cos(3πst)),那么得到的傅里叶变换是几个狄拉克函数的总和。这就是傅里叶变换如何从混合信号中提取单个信号的!欧拉公式和傅里叶变换之间的联系在于,傅里叶变换为了获得旋转图表的质心所需的积分,如果与欧拉公式联系起来,可以非常容易地计算。
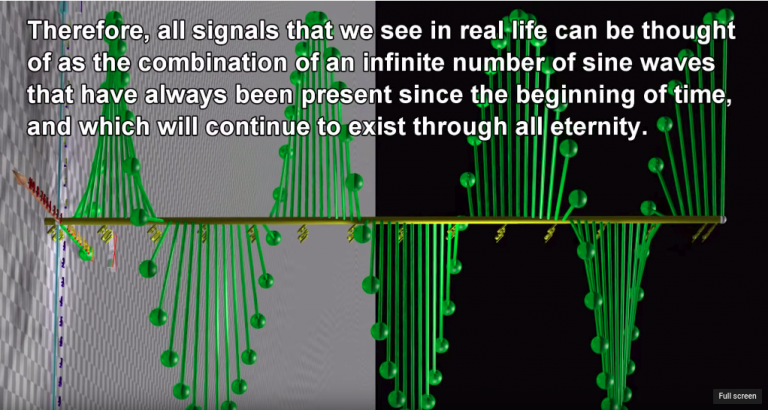
14 14 14 is another illustrative video showing that any signal we can measure can be actually seen as a combination of an infinite number of sine waves. For repeating waves in time space, its Fourier transform may shown as discrete frequency spectrum (like several Dirac deltas). However, non-repeating waves in time space may result to continuous frequency spectrum after Fourier transform. This is interesting to know but I will not explore further within this article.
14 14 14 是另一个说明性视频,显示任何我们可以测量的信号实际上可以看作是无限数量的正弦波的组合。对于时间空间中的重复波,其傅里叶变换可能显示为离散的频率谱(像几个狄拉克δ)。然而,时间空间中的非重复波在傅里叶变换后可能导致连续的频率谱。这是一件有趣的事情,但我将不在本文中进一步探讨。
References
[1] https://betterexplained.com/articles/intuitive-understanding-of-eulers-formula/
[2] https://www.khanacademy.org/science/electrical-engineering/ee-circuit-analysis-topic/ee-ac-analysis/v/ee-complex-numbers
[3] https://www.khanacademy.org/math/ap-calculus-bc/bc-series-new/bc-10-14/v/euler-s-formula-and-euler-s-identity
[4] https://www.youtube.com/watch?v=qpOj98VNJi4
[5] https://en.wikipedia.org/wiki/Euler's_formula#Using_power_series
[6] https://www.youtube.com/watch?v=F_0yfvm0UoU
[7] https://www.youtube.com/watch?v=mvmuCPvRoWQ
[8] https://betterexplained.com/articles/an-interactive-guide-to-the-fourier-transform/
[9] https://www.youtube.com/watch?v=spUNpyF58BY
[10] https://www.wolframalpha.com/input/?i=integrate+cos(x)+from+-infinity+to+infinity
[11] http://fourier.eng.hmc.edu/e102/lectures/ExponentialDelta.pdf
[12] https://math.stackexchange.com/questions/1343859/why-does-integrating-a-complex-exponential-give-the-delta-function
[13] https://www.quora.com/Why-are-integrals-of-complex-exponentials-delta-functions
[14] https://www.youtube.com/watch?v=r18Gi8lSkfM
[15] https://www.astro.umd.edu/~lgm/ASTR410/ft_ref2.pdf
[16] https://math.stackexchange.com/questions/1002/fourier-transform-for-dummies
[17] https://www.youtube.com/watch?v=jPM76k-uNnA
[18] https://blog.mide.com/fourier-transform-basics
[19] https://en.wikipedia.org/wiki/Fourier_transform#Properties_of_the_Fourier_transform
[20] https://web.stanford.edu/class/ee102/lectures/fourtran
傅里叶变换和欧拉公式
f_pytorch于2020 - 04 - 05 01:01:30发布
欧拉公式将三角函数和实数函数(e为底的指数函数)互转桥梁。
e − i θ = cos θ + i sin θ e^{-i\theta}=\cos\theta + i\sin\theta e−iθ=cosθ+isinθ
e − i ω θ = cos ω θ + i sin ω θ e^{-iω\theta}=\cos ω\theta + i\sin ω\theta e−iωθ=cosωθ+isinωθ
可以把三角函数中复杂的三角变换问题转到较直观的代数运算,也能够把高次幂的正余弦函数表示为一次幂函数的代数和,改变被积函数和求导函数。
傅里叶级数告诉我们任何周期函数都可以用正弦函数和余弦函数构成的无穷级数来转换。
傅里叶级数与傅里叶变换公式
傅里叶级数公式:
f ( x ) = a 0 + ∑ n = 1 ∞ ( a n cos n π x L + b n sin n π x L ) f(x)=a_0+\sum_{n = 1}^{\infty}(a_n\cos\frac{n\pi x}{L}+b_n\sin\frac{n\pi x}{L}) f(x)=a0+∑n=1∞(ancosLnπx+bnsinLnπx)
傅里叶变换公式:
F ( ω ) = F [ f ( t ) ] = ∫ − ∞ ∞ f ( t ) e − i ω t d t F(\omega)=\mathcal{F}[f(t)]=\int_{-\infty}^{\infty}f(t)e^{-i\omega t}dt F(ω)=F[f(t)]=∫−∞∞f(t)e−iωtdt
其中, F \mathcal{F} F 表示傅里叶变换运算符。
上述展示了傅里叶分析中的两个重要公式,傅里叶级数用于将周期函数表示为正弦和余弦函数的无穷级数,而傅里叶变换则是将一个函数从时间域转换到频率域的工具,在信号处理、图像处理等领域有广泛应用。
F ( ω ) = F [ f ( x ) ] = ∫ − ∞ ∞ f ( x ) e − i ω x d x F(\omega)=F[f(x)]=\int_{-\infty}^{\infty}f(x)e^{-i\omega x}dx F(ω)=F[f(x)]=∫−∞∞f(x)e−iωxdx
其中 L = T L = T L=T (周期), ω = n π / L \omega = n\pi/L ω=nπ/L 。而三角函数 f ( x ) = A sin ( ω x + θ ) f(x) = A\sin(\omega x + \theta) f(x)=Asin(ωx+θ) 都有自己的振幅 A A A ,角速度(频率) w = 2 π / T w = 2\pi/T w=2π/T 和相位 θ \theta θ 。傅里叶变换把一个关于 x x x 的时间域(变量域)转到频率域 ω \omega ω 来。
计算机上的声音和图像信号、工程上的任何波动信息、数学上的解微分方程、天文学上对遥远星体的观测,现实生活中的数据信号都会用傅里叶变换后处理。手机播放 MP3 音乐、看图片、语音识别,这些都是傅里叶变换的日常应用。傅里叶变换把一些难于直接从时域函数(关于 x x x 的函数曲线)获取信息空域信号转变到频域上,不同事物之间存在着一个变化,频率就描述了它们间变化的快慢速率,实际应用中我们往往是要找到这些频率较高的现象,所以傅里叶变换是把一些复杂的事物拆解成一堆标准化的简单事物的方法。通信工程中经常用到,作为一名计算机系的 IT 男,需要从大数据中提取有用的信息。
看了一晚,看懂时才在知乎上又看到两篇介绍欧拉公式和傅里叶变换的文章,讲的比较好吧
-
如何理解傅立叶级数公式?
https://www.matongxue.com/madocs/619.html -
从傅立叶级数到傅立叶变换
https://www.matongxue.com/madocs/712.html
欧拉公式和三大变换
XiaoMing_sususu于2021 - 04 - 17 17:16:39 发布
1.起源——欧拉公式 , i i i 是什么,欧拉公式在复平面的意义。 e i x e^{ix} eix 其实构成了完备的标准正交基。
e i x = cos ( x ) + i sin ( x ) e^{ix}=\cos(x)+i\sin(x) eix=cos(x)+isin(x)
i i i 代表了旋转。
欧拉恒等式在数学中严谨可以用泰勒公式推导得出,由 e i x e^{ix} eix 和 sin x \sin x sinx 、 cos x \cos x cosx 的泰勒展开可得。
e i x e^{ix} eix 可以理解为一个单位圆。并且很容易看出: e i x e^{ix} eix 代表一组矢量,矢量的角度为 x x x ,矢量的幅值为 1 。在圆上的向量实轴投影可以表示为 cos x \cos x cosx ,虚轴投影可以表示为 sin x \sin x sinx 。 e i x e^{ix} eix 就等于两个向量相加即欧拉恒等式。
e i x e^{ix} eix 也可以看成垂直复平面上逆时针做圆周运动的点,螺旋线,在实部投影为 cos x \cos x cosx 曲线,而投影到虚轴就为 sin x \sin x sinx 曲线。
2.自然常数“ e e e ”,工程中的自然数“ 1 1 1 ”,结合 e e e 高数的重要极限。 e e e 代表了连续。
3.信号的正交分解
内积是信号处理很重要概念,傅里叶变换,滤波器,甚至卷积神经网络都需要理解这个概念。
正交分解其实就是用正交基去表示一个信号,用信号 f ( t ) f(t) f(t) 去乘以各个正交基得到的结果就是这个信号在各个基的投影可称之为系数。再用系数 × \times × 正交基联合表示信号。但是用多少个正交基是正确的呢?或者说用多少正交基表示出来的信号最像或者就是原信号?
这时候引入一个最小方均误差,方均误差为 0 时可以说用各个基表示了该信号,但是此时要求的正交基应该是完备正交基。通俗的说就是你再也找不到与之前正交集里面正交的基再加入进去了。
信号的正交分解在推导傅里叶变换具有重要作用
f ( t ) = ∫ − ∞ + ∞ 1 2 π ( ∫ − ∞ + ∞ f ( t ) e − i W t d t ) e i W t d W = 1 2 π ∫ − ∞ + ∞ ( ∫ − ∞ + ∞ f ( t ) e − i W t d t ) e i W t d W \begin{align*} f(t)&=\int_{-\infty}^{+\infty}\frac{1}{2\pi}(\int_{-\infty}^{+\infty}f(t)e^{-iWt}dt)e^{iWt}dW\\ &=\frac{1}{2\pi}\int_{-\infty}^{+\infty}(\int_{-\infty}^{+\infty}f(t)e^{-iWt}dt)e^{iWt}dW \end{align*} f(t)=∫−∞+∞2π1(∫−∞+∞f(t)e−iWtdt)eiWtdW=2π1∫−∞+∞(∫−∞+∞f(t)e−iWtdt)eiWtdW
用内积可以证明 e i ω t e^{i\omega t} eiωt 是一组完备的标准正交基此时就不难理解
其中:
F ( ω ) = ∫ − ∞ ∞ f ( t ) e − i ω t d t F(\omega)=\int_{-\infty}^{\infty}f(t)e^{-i\omega t}dt F(ω)=∫−∞∞f(t)e−iωtdt
傅里叶变换 F T FT FT 的本质可以看成是正交分解: f ( t ) f(t) f(t) 和 e i ω t e^{i\omega t} eiωt 求内积的时候, f ( t ) f(t) f(t) 中只有频率为 e i ω t e^{i\omega t} eiωt 的分量才会有内积的结果,其余分量的内积为 0,积分值是时间从负无穷到正无穷,求出一个关于 ω \omega ω 的函数 F ( ω ) F(\omega) F(ω) 。
f ( t ) = ∑ ω = − ∞ + ∞ A ω e i ω t = 1 2 π ∫ − ∞ + ∞ F ( ω ) e i ω t d ω f(t)=\sum_{\omega = -\infty}^{+\infty}A_{\omega}e^{i\omega t}=\frac{1}{2\pi}\int_{-\infty}^{+\infty}F(\omega)e^{i\omega t}d\omega f(t)=ω=−∞∑+∞Aωeiωt=2π1∫−∞+∞F(ω)eiωtdω
而此称为傅里叶反变换 I F T IFT IFT
4.傅里叶变换和拉普拉斯变换和 Z Z Z 变换的联系
傅里叶变换
傅里叶变换的收敛有一个狄里赫利条件,要求信号绝对可积/可和。
拉普拉斯变换:
美中不足的是在现实情况下仍有相当多的不绝对可积的信号[例如信号 e a t u ( t ) e^{at}u(t) eatu(t) , a > 0 a>0 a>0 等等]的傅里叶变换并不存在。由此引出了拉普拉斯变换。
可以从定义式推出将 f ( t ) f(t) f(t) 乘上一个指数函数 e − σ t e^{-\sigma t} e−σt 可以理解成衰减因子从而此 f ( t ) e − σ t f(t)e^{-\sigma t} f(t)e−σt 就满足了绝对可积的条件。
拉普拉斯变换与连续时间傅里叶变换的关系是:
拉普拉斯变换将频率从实数推广为复数,因而傅里叶变换变成了拉普拉斯变换的一个特例。
当 s s s 为纯虚数时, x ( t ) x(t) x(t) 的拉普拉斯变换,即为 x ( t ) x(t) x(t) 的傅里叶变换。
从图像的角度来说,拉普拉斯变换得到的频谱是一个复平面上的函数,傅里叶变换得到的频谱,则是从虚轴上切一刀(忽略实轴 s s s 为纯虚数),得到的函数的剖面。
Z Z Z 变换:
也可以从定义式中为了让不满足绝对可和条件的函数 x [ n ] x[n] x[n] ,也能变换到频率域,我们乘一个指数函数 a − n a^{-n} a−n , a a a 为(满足收敛域的)任意实数。
所以 Z Z Z 变换与离散时间傅里叶变换(DTFT)的关系是: Z Z Z 变换将频率从实数推广为复数,因而 DTFT 变成了 Z Z Z 变换的一个特例。当 z z z 的模为1时, x [ n ] x[n] x[n] 的 Z Z Z 变换即为 x [ n ] x[n] x[n] 的 DTFT。从图像的角度来说, Z Z Z 变换得到的频谱,是一个复平面上的函数,而 DTFT 得到的频谱,则是沿着单位圆切一刀,得到的函数的剖面,从负实轴切断展开的图像。
Z Z Z 变换是对离散时间信号的傅里叶变换 DTFT 进行理论拓展,使其能适用于离散时间信号不绝对可加时的情况。DTFT→ Z Z Z 变换。
5.任何一个域连续,则在另一个域为非周期的;任何一个域离散,则在另一个域为周期的。
CTFT → DTFT → DFT → FFT
连续时间傅里叶变换 CTFT
离散时间傅里叶变换(DTFT)
离散傅里叶变换(DFT)
快速傅里叶变换(FFT)
如果一个信号的频谱是连续的(DTFT),那么仍然没法在机器中处理,频率也要离散化才行,所需要的技术就是离散傅里叶变换 DFT(Discrete Fourier Transform),即具有周期特性离散信号的傅里叶级数(就是将无限长的离散限号进行截短至 N N N 个采样点,然后将这个 N N N 个采样点进行周期延拓),而 FFT 只是 DFT 的快速算法罢了。
-
CTFT → DTFT:
CTFT 针对连续时间信号 x ( t ) x (t) x(t) 展开,其数学表达式为 X ( j ω ) = ∫ − ∞ ∞ x ( t ) e − j ω t d t X (j\omega)=\int_{-\infty}^{\infty} x (t) e^{-j\omega t} dt X(jω)=∫−∞∞x(t)e−jωtdt,该变换实现了将连续时间信号从时域至频域的映射,所得频域呈现连续性。当对连续时间信号进行均匀采样,采样间隔为 T s T_{s} Ts,得到离散时间信号 x [ n ] = x ( n T s ) x [n]=x (nT_{s}) x[n]=x(nTs),其 DTFT 定义为 X ( e j ω ) = ∑ n = − ∞ ∞ x [ n ] e − j ω n X (e^{j\omega})=\sum_{n = -\infty}^{\infty} x [n] e^{-j\omega n} X(ejω)=∑n=−∞∞x[n]e−jωn,此变换下频域仍具连续性,且以 2 π 2\pi 2π 为周期,是连续时间信号采样后的频域表征形式。
-
DTFT → DFT:
鉴于 DTFT 频谱的连续性,在数字计算系统中难以直接高效处理。DFT 应运而生,它聚焦于有限长离散序列。设离散序列 x [ n ] x [n] x[n] 长度限定为 N N N,其 DFT 定义式为 X [ k ] = ∑ n = 0 N − 1 x [ n ] e − j 2 π N k n X [k]=\sum_{n = 0}^{N - 1} x [n] e^{-j\frac {2\pi}{N} kn} X[k]=∑n=0N−1x[n]e−jN2πkn,其中 k = 0 , 1 , ⋯ , N − 1 k = 0,1,\cdots,N - 1 k=0,1,⋯,N−1。这一变换可阐释为:先对 DTFT 所对应的无限长离散信号实施截短操作,截取 N N N 个采样点,随后将这 N N N 个采样点以周期 N N N 进行延拓,进而在频域实现离散化,DFT 结果同样具备周期性,周期为 N N N。
-
DFT → FFT:
FFT 本质上是一种旨在加速 DFT 计算过程的高效算法。DFT 直接计算时,对于 N N N 点序列,通常需耗费 O ( N 2 ) O (N^{2}) O(N2) 量级的复数乘法与加法运算量。然而,FFT 算法充分挖掘并利用了 DFT 计算进程中的内在对称性与周期性等固有特性,极大程度削减了运算复杂度。特别地,当 N = 2 m N = 2^{m} N=2m( m m m 为正整数)时,运用 FFT 算法,运算量可锐减至 O ( N log 2 N ) O (N\log_{2} N) O(Nlog2N),显著提升了数字信号处理的效率。
via:
-
Euler’s Formula and Fourier Transform – czxttkl Posted by czxttkl, October 7, 2018
https://czxttkl.com/2018/10/07/eulers-formula/ -
欧拉公式与傅里叶变换的魅力-CSDN博客 f_pytorch于2020 - 04 - 05 01:01:30发布
https://blog.csdn.net/CHWB2580/article/details/105321340 -
欧拉公式和三大变换_欧拉公式变换-CSDN博客 XiaoMing_sususu于2021 - 04 - 17 17:16:39 发布
https://blog.csdn.net/qq_41786448/article/details/115795808