- 💡统一使用 YOLOv7 代码框架,结合不同模块来构建不同的YOLO目标检测模型。
- 🌟本项目包含大量的改进方式,降低改进难度,改进点包含
【Backbone特征主干】、【Neck特征融合】、【Head检测头】、【注意力机制】、【IoU损失函数】、【NMS】、【Loss计算方式】、【自注意力机制】、【数据增强部分】、【标签分配策略】、【激活函数】等各个部分
CSDN芒果汁没有芒果 首发更新内容
本篇是《BoTNet Transformer结构🚀》的修改 演示
文章目录
- BoTNet理论部分
- YOLOv7添加BoT的yaml配置文件修改
- common.py配置
- yolo.py配置修改
- 训练yolov7_botnet.yaml模型
- 基于以上yolov7_botnet.yaml文件继续修改
BoTNet理论部分
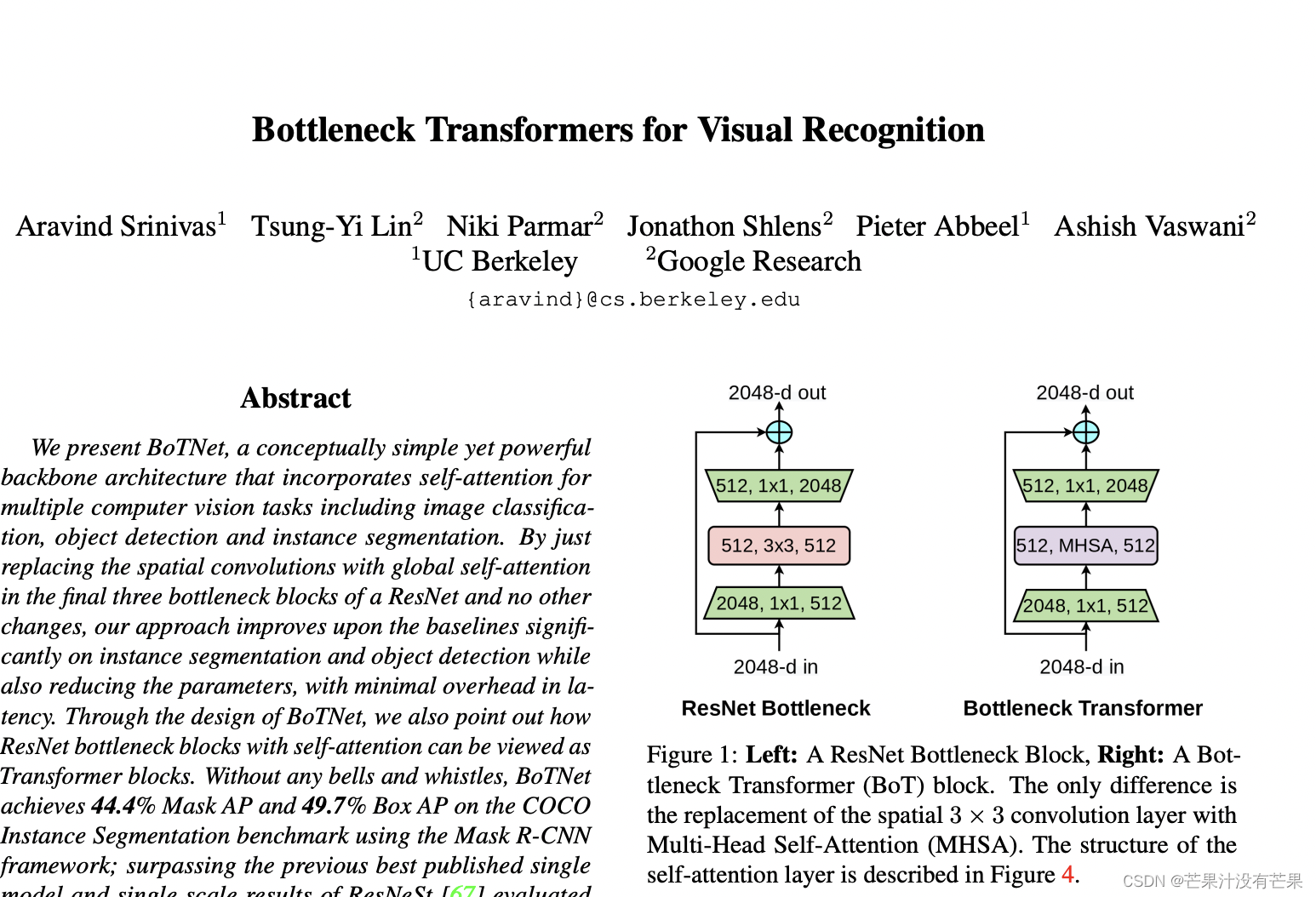
论文:Bottleneck Transformers for Visual Recognition
论文地址:arxiv
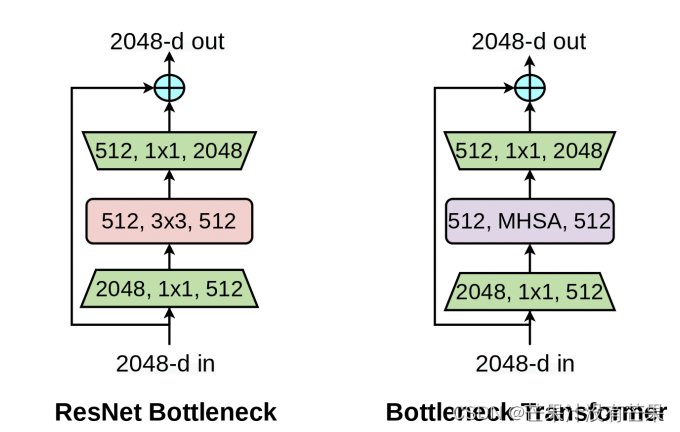
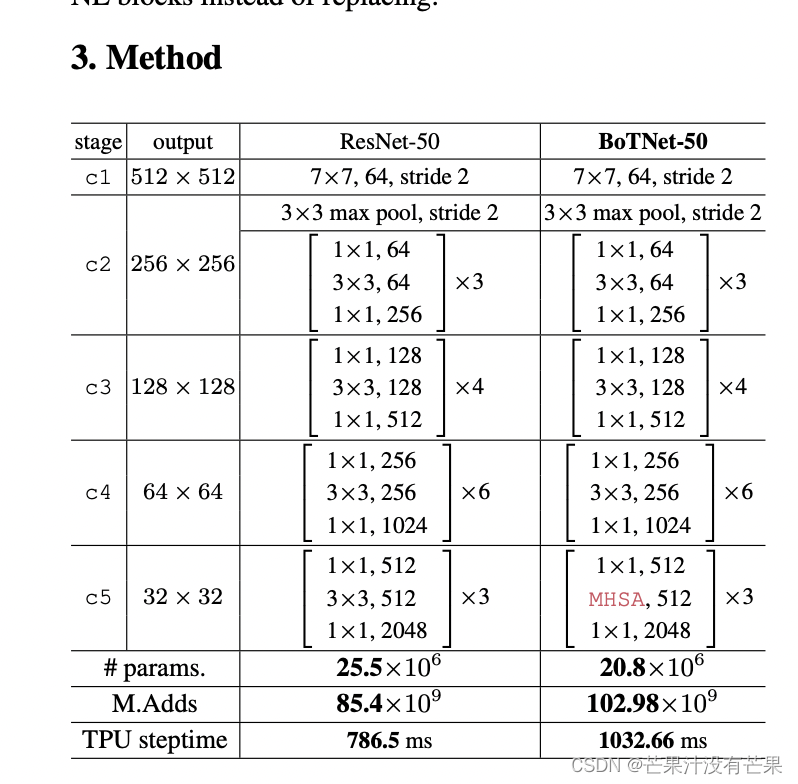
论文提出了 BoTNet,这是一种概念上简单但功能强大的主干架构,它结合了用于多个计算机视觉任务的自注意力,包括图像分类、对象检测和实例分割。通过仅在 ResNet 的最后三个瓶颈块中用全局自注意力替换空间卷积并且没有其他更改,我们的方法在实例分割和对象检测方面显着改进了基线,同时还减少了参数,而延迟开销最小。通过 BoTNet 的设计,我们还指出了如何将具有自注意力的 ResNet 瓶颈块视为 Transformer 块。没有任何花里胡哨,BoTNet 达到44.4 % Mask AP 和49.7% Box AP on the COCO Instance Segmentation benchmark using the Mask R-CNN framework;超过了 ResNeSt 之前发表的最佳单一模型和单一尺度结果 [72]在 COCO 验证集上进行评估。最后,我们展示了对 BoTNet 设计的简单改编,用于图像分类,从而使模型在 ImageNet 基准测试中实现了84.7 % 的 top- 1准确率,同时在“计算”速度上比流行的模型快2.33倍TPU-v3 硬件上的 EfficientNet 模型。我们希望我们简单而有效的方法能够为未来视觉自注意力模型的研究奠定坚实的基础。2
BoTNet:一种简单却功能强大的backbone,该架构将自注意力纳入了多种计算机视觉任务,包括图像分类,目标检测和实例分割。该方法在实例分割和目标检测方面显著改善了基线,同时还减少了参数,从而使延迟最小化。
通过仅在ResNet中,用Multi-Head Self-Attention (MHSA)来替换3 × 3 convolution,并且不进行其他任何更改(如图1所示)。

实验
YOLOv7添加BoT的yaml配置文件修改
增加以下yolov7_botnet.yaml文件
# YOLOv7 🚀, GPL-3.0 license
# parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 1.0 # layer channel multiple# anchors
anchors:- [12,16, 19,36, 40,28] # P3/8- [36,75, 76,55, 72,146] # P4/16- [142,110, 192,243, 459,401] # P5/32# yolov7 backbone by yoloair
backbone:# [from, number, module, args][[-1, 1, Conv, [32, 3, 1]], # 0[-1, 1, Conv, [64, 3, 2]], # 1-P1/2[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [128, 3, 2]], # 3-P2/4 [-1, 1, BoT3, [128]], [-1, 1, Conv, [256, 3, 2]], [-1, 1, MP, []],[-1, 1, Conv, [128, 1, 1]],[-3, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 2]],[[-1, -3], 1, Concat, [1]], # 16-P3/8[-1, 1, Conv, [128, 1, 1]],[-2, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1]],[-1, 1, MP, []],[-1, 1, Conv, [256, 1, 1]],[-3, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 2]],[[-1, -3], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [1024, 1, 1]], [-1, 1, MP, []],[-1, 1, Conv, [512, 1, 1]],[-3, 1, Conv, [512, 1, 1]],[-1, 1, Conv, [512, 3, 2]],[[-1, -3], 1, Concat, [1]],[-1, 1, BoT3, [1024]],[-1, 1, Conv, [256, 3, 1]],]# yolov7 head by yoloair
head:[[-1, 1, SPPCSPC, [512]],[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[31, 1, Conv, [256, 1, 1]],[[-1, -2], 1, Concat, [1]],[-1, 1, BoT3, [128]],[-1, 1, Conv, [128, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[18, 1, Conv, [128, 1, 1]],[[-1, -2], 1, Concat, [1]],[-1, 1, BoT3, [128]],[-1, 1, MP, []],[-1, 1, Conv, [128, 1, 1]],[-3, 1, CBAM, [128]],[-1, 1, Conv, [128, 3, 2]],[[-1, -3, 44], 1, Concat, [1]],[-1, 1, BoT3, [256]], [-1, 1, MP, []],[-1, 1, Conv, [256, 1, 1]],[-3, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 2]], [[-1, -3, 39], 1, Concat, [1]],[-1, 3, BoT3, [512]],# 检测头 -----------------------------[49, 1, RepConv, [256, 3, 1]],[55, 1, RepConv, [512, 3, 1]],[61, 1, RepConv, [1024, 3, 1]],[[62,63,64], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)]
common.py配置
./models/common.py文件增加以下模块
class MHSA(nn.Module):def __init__(self, n_dims, width=14, height=14, heads=4,pos_emb=False):super(MHSA, self).__init__()self.heads = headsself.query = nn.Conv2d(n_dims, n_dims, kernel_size=1)self.key = nn.Conv2d(n_dims, n_dims, kernel_size=1)self.value = nn.Conv2d(n_dims, n_dims, kernel_size=1)self.pos=pos_embif self.pos :self.rel_h_weight = nn.Parameter(torch.randn([1, heads, (n_dims ) // heads, 1, int(height)]), requires_grad=True)self.rel_w_weight = nn.Parameter(torch.randn([1, heads, (n_dims )// heads, int(width), 1]), requires_grad=True)self.softmax = nn.Softmax(dim=-1)def forward(self, x):n_batch, C, width, height = x.size() q = self.query(x).view(n_batch, self.heads, C // self.heads, -1)k = self.key(x).view(n_batch, self.heads, C // self.heads, -1)v = self.value(x).view(n_batch, self.heads, C // self.heads, -1)#print('q shape:{},k shape:{},v shape:{}'.format(q.shape,k.shape,v.shape)) #1,4,64,256content_content = torch.matmul(q.permute(0,1,3,2), k) #1,C,h*w,h*w# print("qkT=",content_content.shape)c1,c2,c3,c4=content_content.size()if self.pos:# print("old content_content shape",content_content.shape) #1,4,256,256content_position = (self.rel_h_weight + self.rel_w_weight).view(1, self.heads, C // self.heads, -1).permute(0,1,3,2) #1,4,1024,64content_position = torch.matmul(content_position, q)# ([1, 4, 1024, 256])content_position=content_position if(content_content.shape==content_position.shape)else content_position[:,: , :c3,]assert(content_content.shape==content_position.shape)#print('new pos222-> shape:',content_position.shape)# print('new content222-> shape:',content_content.shape)energy = content_content + content_positionelse:energy=content_contentattention = self.softmax(energy)out = torch.matmul(v, attention.permute(0,1,3,2)) #1,4,256,64out = out.view(n_batch, C, width, height)return out
class BottleneckTransformer(nn.Module):# Transformer bottleneck#expansion = 1def __init__(self, c1, c2, stride=1, heads=4, mhsa=True, resolution=None,expansion=1):super(BottleneckTransformer, self).__init__()c_=int(c2*expansion)self.cv1 = Conv(c1, c_, 1,1)#self.bn1 = nn.BatchNorm2d(c2)if not mhsa:self.cv2 = Conv(c_,c2, 3, 1)else:self.cv2 = nn.ModuleList()self.cv2.append(MHSA(c2, width=int(resolution[0]), height=int(resolution[1]), heads=heads))if stride == 2:self.cv2.append(nn.AvgPool2d(2, 2))self.cv2 = nn.Sequential(*self.cv2)self.shortcut = c1==c2 if stride != 1 or c1 != expansion*c2:self.shortcut = nn.Sequential(nn.Conv2d(c1, expansion*c2, kernel_size=1, stride=stride),nn.BatchNorm2d(expansion*c2))self.fc1 = nn.Linear(c2, c2) def forward(self, x):out=x + self.cv2(self.cv1(x)) if self.shortcut else self.cv2(self.cv1(x))return outclass BoT3(nn.Module):# CSP Bottleneck with 3 convolutionsdef __init__(self, c1, c2, n=1,e=0.5,e2=1,w=20,h=20): # ch_in, ch_out, number, , expansion,w,hsuper(BoT3, self).__init__()c_ = int(c2*e) # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c1, c_, 1, 1)self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2)self.m = nn.Sequential(*[BottleneckTransformer(c_ ,c_, stride=1, heads=4,mhsa=True,resolution=(w,h),expansion=e2) for _ in range(n)])# self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)])def forward(self, x):return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))
yolo.py配置修改
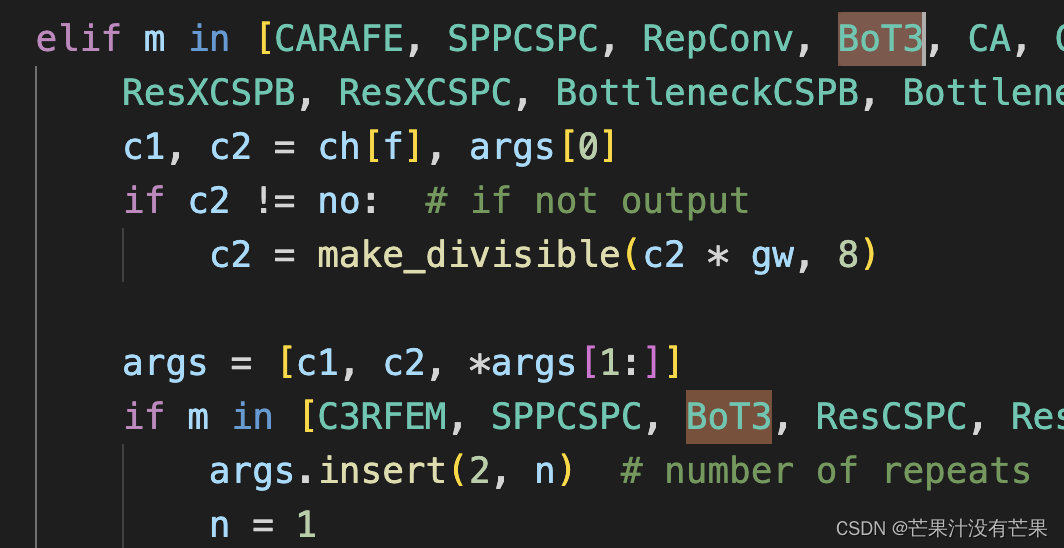
然后找到./models/yolo.py文件下里的parse_model函数,将加入的模块名BoT3加入进去
在 models/yolo.py文件夹下
- 定位到parse_model函数中
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']):内部- 对应位置 下方只需要增加
BoT3模块
参考示意图
训练yolov7_botnet.yaml模型
python train.py --cfg yolov7_botnet.yaml
基于以上yolov7_botnet.yaml文件继续修改
关于yolov7_botnet.yaml文件配置中的BoT3模块里面的self-attention模块,可以针对不同数据集自行再进行模块修改,原理一致